
|
|
Основное уравнение динамики вращающегося тела
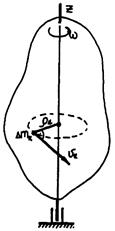
Пусть твердое тело (рис. 11.2) под действием внешних сил Fek
Рис. 11.2. К определению работы сил, действующих на вращающееся тело
Алгебраическая сумма моментов всех сил (активных сил и сил сопротивления) относительно оси OZ
называется вращающим моментом. Рассматривая твердое тело как механическую систему, разобьем
и нормальное akn ускорение. Приложим к каждой материальной точке элементарные силы
силы реакции связей и силы инерции образуют уравновешенную систему. Поэтому алгебраическая сумма моментов всех этих сил относительно оси OZ должна быть равна нулю, т. е.
нии действия этих сил пересекают ось).
тельного ускорения akt , поэтому значение
точек тела на квадраты их расстояний от оси вращения, называется моментом инерции тела (системы) относительно этой оси. Основное уравнение динамики вращающегося тела:
В СИ момент инерции тела выражается в кг · м2. Кинетическая энергия тела. Кинетический момент Кинетическая энергия тела складывается из кинетических энер- гий его отдельных точек. 1. При поступательном движении тела (рис. 11.3) скорости всех
где m – масса тела; Eк.п
Рис. 11.3. К определению кинетической энергии при поступательном движении тела
2. При вращательном движении тела с некоторой угловой скоро- стью ω (рис. 11.4) все его точки движутся по окружностям различ-
ω ρk. Определив кинети-
Eк.вр m k и сложив ее по всему объему
А так как Рис. 11.4. К определению кинетической энергии при вращательном движении тела
оси Z, для кинетической энергии находим такое выражение:
Кинетическая энергия тела при сложном его движении (в част- ности, при плоскопараллельном) складывается из кинетической энергии поступательного движения со скоростью центра масс и ки- нетической энергии вращательного движения с угловой скоростью вокруг оси, проходящей через центр масс, т. е.
Кроме кинетической энергии мерой вращательного движения тела является величина Izω, называемая кинетическим моментом
. с
И ИССЛЕДОВАНИЯ МЕХАНИЗМОВ ГЛАВА 12. СТРУКТУРА МЕХАНИЗМОВ Основные понятия Механизмом называется система тел, предназначенная для пре- образования движения одного или нескольких твердых тел в требу- емые движения других твердых тел. Машиной называется устройство, выполняющее механические движения для преобразования энергии, материалов и информации с целью замены или облегчения физического и умственного труда человека. В зависимости от основного назначения различают энер- гетические, технологические, транспортные и информационные машины. Энергетические машины предназначены для преобразова- ния энергии. К ним относятся, например, электродвигатели, двига- тели внутреннего сгорания, турбины, электрогенераторы. Техноло- гические машины предназначены для преобразования обрабатывае- мого предмета, которое состоит в изменении его размеров, форм, свойств или состояния. Транспортные машины предназначены для перемещения людей и грузов. Информационные машины предна- значены для получения и преобразования информации. В состав машины обычно входят различные механизмы. Всякий механизм состоит из отдельных твердых тел, называе- мых деталями. Деталь является такой частью машины, которую изготовляют без сборочных операций. Детали могут быть просты- ми (гайка, шпонка и т. п.) и сложными (коленчатый вал, корпус ре- дуктора, станина станка и т. п.). Детали частично или полностью объединяют в узлы. Узел представляет собой законченную сбороч- ную единицу, состоящую из ряда деталей, имеющих общее функ- циональное назначение (подшипник, муфта, редуктор и т. п.). Сложные узлы могут включать в себя несколько узлов (подузлов), например, в состав редуктора входят подшипники, валы с насажен- ными на них зубчатыми колесами и т. п. Одно или несколько жест- ко соединенных твердых тел, входящих в состав механизма, назы- ваются звеном.
Кинематической парой называется соединение двух соприка- сающихся звеньев, допускающее их относительное движение.

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|

 (эти силы на рис. 11.2 не показаны) вращается около оси OZ с угло- вым ускорением ε .
(эти силы на рис. 11.2 не показаны) вращается около оси OZ с угло- вым ускорением ε .
 Mez
Mez его на множество материальных точек массами . Каждая из
его на множество материальных точек массами . Каждая из
 которое разложим на касательное akτ
которое разложим на касательное akτ инерции: касательную и нормальную
инерции: касательную и нормальную . Согласно принципу Даламбера, активные силы,
. Согласно принципу Даламбера, активные силы, Mez
Mez (моменты сил относительно оси OZ равны нулю, так как ли-
(моменты сил относительно оси OZ равны нулю, так как ли- У любой точки вращающегося тела числовое значение каса-
У любой точки вращающегося тела числовое значение каса-
 Mez
Mez Величина , равная сумме произведений масс всех
Величина , равная сумме произведений масс всех Mez
Mez его точек равны между собой и равны – скорости центра масс
его точек равны между собой и равны – скорости центра масс тела. Поэтому легко понять, что кинетическая энергия тела при по- ступательном движении
тела. Поэтому легко понять, что кинетическая энергия тела при по- ступательном движении – значение скорости центра масс.
– значение скорости центра масс.
 ных радиусов ρk и имеют скорости k
ных радиусов ρk и имеют скорости k
 – момент инерции тела относительно
– момент инерции тела относительно Eк.вр
Eк.вр Eк
Eк
