|
|
Выбор состава и технических характеристик средств контроля, управления, связи, сигнализации и навигации8.1.1 По результатам рассмотрения состава технических средств и тактики использования современных ТУС выделяются основные функциональные задачи средств управления: 1) в течение всего времени прокладки трубопровода требуется согласованная работа технических средств систем позиционирования (ЯЛ и/или ДРК), натяжителей, регулируемых роликовых опор и балластных систем судна и стингера; 2) для обеспечения проведения технологических операций и режимов движения судна, средствами управления обеспечиватся управление движением и/или позиционированием с требуемой точностью в любом сочетании ЯЛ и ДРК; 3) работы по балластировке судна и стингера являются автоматизированными для поддержания требуемой посадки; 4) обеспечение электроэнергией основных потребителей должно быть бесперебойным. Основные функциональные задачи, реализуемые на ТУС, обуславливают наличие следующих основных средств контроля, управления, связи, сигнализации и навигации: 1) система управления перемещением и позиционированием, обеспечивающая работу в режимах якорного, комбинированного и динамического позиционирования ТУС; 2) средства навигационного обеспечения; 3) средства управления технологическим комплексом сборки и сварки трубопроводов.
8.1.2 Требования к системе управления перемещением и позиционированием (СУ ТС ПТС) В течение всех операций по укладке трубопровода СУ ТС ПТС как правило обеспечиват: 1) В режиме якорного позиционирования: - согласованное управление кормовыми и носовыми ЯЛ для плавного перемещения судна в пределах заданного коридора; - контроль усилий в якорных тросах и сигнализацию об их недопустимом превышении; - эффективность работы технических средств должна обеспечиваться при переукладке (выключении из работы) одного-двух якорей, а также при обрыве одного (любого) троса. 2) В режиме динамического позиционирования: - управление техническими средствами ДРК для перемещения судна в пределах заданного коридора; - управление техническими средствами ДРК для создания поперечного, продольного упора и момента для компенсации внешних сил при удержании на точке; - троирование систем для измерения местоположения и курса судна. 3) В комбинированном режиме позиционирования должно обеспечиваться управление техническими средствами ДРК для поддержания заданного усилия в якорных связях при согласованной работе ЯЛ и ДРК. В зависимости от условий проведения трубоукладочных работ (глубина моря, гидрометеорологические условия) может быть использована любая из приведенных систем позиционирования. Независимо от используемой в текущих условиях системы позиционирования должны обеспечиваться: 1) поддержание требуемой точности позиционирования; 2) автоматизированные работы по балластировке судна для поддержания требуемой посадки; 3) согласованная работа технических средств систем позиционирования (ЯЛ и/или ДРК), натяжителей, регулируемых роликовых опор и балластных систем судна и стингера; 4) дублированные датчики для измерения кинематических и технологических параметров (угол, крен, вертикальная качка и др); 5) анализ последствий и прогнозирование ситуаций. С целью обеспечения перечисленных требований при позиционировании и перемещении судна СУ ТС ПТС осуществляет автоматическое, полуавтоматическое и дистанционное управление тремя комплексами ТС: 1) якорной системой позиционирования и перемещения (ЯЛ); 2) движительно-рулевым комплексом (ДРК); 3) устройствами натяжения трубопровода. В течение технологического процесса по сборке, монтажу и укладке трубопровода осуществляются: 1) непрерывный контроль критических параметров движения судна, напряжений в трубопроводе (измеряемых непосредственно в натяжителях, на роликовых опорах и на ферме стингера), а также усилий в якорных линиях с отображением графической информации на дисплеях и регистрацией протоколов маневрирования и режимов работы технологического оборудования; 2) контроль гидрометеоусловий эксплуатации судна с представлением оператору текущих изменений ветровых возмущений; 3) расчет траектории движения судна и выработка корректирующих поправок на основе заданной линии укладки трубопровода, глубины места, параметров течения и текущего положения судна относительно трассы; 4) автоматический контроль остойчивости и посадки судна с выдачей рекомендаций оператору о выполнении операций по кренованию, дифферентовке и выравниванию заданной осадки судна; 5) предоставление оператору средств интеллектуальной поддержки для оперативного и объективного выбора решений по перезавозке якорей, корректировке параметров движения и позиционирования трубоукладочного судна, а также для выполнения математических расчетов формы трубопровода в двух плоскостях, изгибающих моментов, расстояния до точки касания трубопроводом дна.
8.1.3 Требования к системе навигационного обеспечения позиционирования ТУС Для высокоточной укладки трубопровода по трассе при движении трубоукладочного судна необходимы измерительные средства, позволяющие определять смещение точки касания дна трубопроводом относительно заданной трассы прокладки. При этом необходимо учитывать то обстоятельство, что точка касания грунта трубопроводом в зависимости от глубины укладки находится на значительном расстоянии. Для определения положения морского трубопровода на морском дне (или в траншее) в зарубежных системах пользуются следующими методами: – расчетным расстоянием до точки касания; – акустическим, с использованием боковых сканирующих сонарных устройств; – водолазным обследованием; – использованием подводных аппаратов с дистанционным управлением. Использование перечисленных способов определения местоположения трубопровода на дне (в траншее) для управления перемещением судна возможно только при непосредственном участии человека. Оператор визуально, либо по результатам регистрации параметров рельефа дна определяет положение трубопровода и оценивает тенденцию смещения оси трубопровода относительно заданной трассы или арматуры на дне, к которой необходимо подключить трубопровод. На основании полученных результатов оператор прокладывает направление пути следующего участка перемещения судна с учетом коррекции параметров движения, в том числе устанавливает курс и проекции скоростей из расчета совмещения оси трубопровода с «серединой» трассы. Определение координат местоположения судна осуществляется различными системами: спутниковыми, гидроакустическими и инерциальными. Применение гидроакустических систем необходимо в тех районах, где требуется высокая точность позиционирования. Повышение точности прокладки особенно необходимо при пересеченном рельефе дна и в районах с уже проложенными трубопроводами, где укладка трубопроводов может производиться в узких коридорах на морском дне. Так, например, в районе Северного моря были проведены работы по укладке трубопроводов, соединяющих месторождение Magnus с платформой. Для высокоточного маневрирования трубоукладочного судна «Castого Sei» использовалось специальное судно «Saipem», оборудованное системой динамического позиционирования и оснащенное дистанционно-управляемым аппаратом и водолазным комплексом. Определение взаимного расположения трубоукладочного и обеспечивающего судов, а также подводного аппарата производилось с помощью гидроакустических систем. Обеспечивающее судно, используя данные о расположении точки касания трубопровода, получаемые по каналу связи с подводным аппаратом, передавало их на трубоукладочное судно и корректировало параметры движения. При такой организации работ была достигнута исключительно высокая точность прокладки трубопроводов на морском дне. Отклонение проложенных трубопроводов от середины заданного коридора (ширина 10м) не превышали 1-2м. При проведении укладки и монтажа трубопроводов на глубинах до 400м потребуется проведение аналогичной организации работ с высокоточным позиционированием трубоукладочного судна. В рассматриваемых аналогах трубоукладочных судов, как правило, предусмотрены системы динамического позиционирования класса NMD Class 2 / LR DP (AA) или NMD Class 3 / LR DP (AAA), что соответствует классам 2 (DYNPOS-2) и 3 (DYNPOS-3) по правилам РМРС, соответственно. Согласно требованиям РМРС для судов с системой динамического позиционирования классов 2 и 3 должны быть предусмотрены, по крайней мере, три независимые системы определения местоположения, работающие на различных принципах. Для контроля за положением трубопровода на дне, выработки решения по дальнейшему направлению перемещения ТУС применяются: – система подводного телевидения с использованием подводных управляемых средств (ROV). – многолучевые эхолоты. Также используется совместное применение многолучевого эхолота и системы подводного цифрового телевидения.
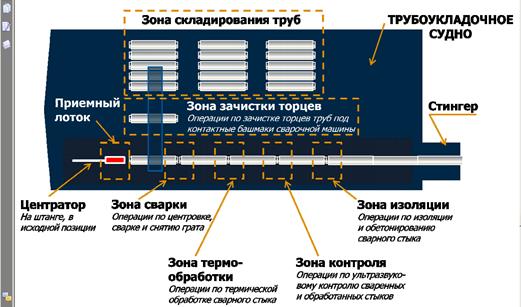
8.1.4 Контроль и управление оборудованием технологической линии ТУС и вспромогательными системами, обеспечивающими его работу Технологический процесс сварки и термообработки сварного стыка, применяемый на современных ТУС, показан на нижеприведенном рисунке 8.1.
Рисунок 8.1 – Принципиальная схема технологического процесса на ТУС
Технологические посты (сварочные, ультразвукового контроля и т.д.) включают в себя локальные системы контроля, управления, поставляемые комплектно с технологическим оборудованием соответствующего поста. Локальные системы управления включают в себя необходимый набор датчиков и исполнительных механизмов, обеспечивающих выполнение соответсвующей технологической операции. Технологические посты оборудуются необходимым составом средств видеонаблюдения и связи. Контроль и управление вспомогательными системами, обеспечивающими работу технологической линии ТУС (перечислены в п.6 настоящего раздела) обеспечивается средствами автоматизированной системы управления техническими средствами (АСУ ТС) трубоукладочного судна. По этим системам АСУ ТС обеспечивает: 1) работу в режимах дистанционного и автоматического управления; 2) представление в постах управления индикации и аварийно-предупредительной сигнализации параметров работы; 3) необходимые защиты и блокировки для надежной и безаварийной работы.
Кроме этого АСУ ТС обеспечивает интеграцию СУ ТС ПТС с балластными системами судна и стингера, локальными системами управления (ЛСУ) натяжителей, регулируемых роликовых опор, технологического оборудования для обеспечения их согласованной работы.

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|