
|
|
Режим подъёма одного якоря.При стоянке судна на якоре один конец якорной цепи с якорем лежит на грунте, а второй проходит через клюз и якорную звёздочку в цепной ящик. Провисающая в воде часть цепи “а” находится под действием внешних сил, дейст- вующих на судно: силы ветра F нее натянута якорная цепь. Увеличение натяжения цепи вызывает подъём части цепи с грунта, при этом увеличивается длина её провисающей части. Процесс снятия судна с якоря делится на 4 стадии ( рис. 12.4 ).
Рис.12.4. Процесс снятия судна с якоря
В стадии 1 брашпиль выбирает цепь, втягивая её звенья в клюз. При этом судно под действием усилия в цепи, созданного работой электродвигателя брашпиля, движется с небольшой скоростью к месту залегания якоря. Количество звеньев, втягиваемых в клюз, равно количеству звеньев, поднятых с грунта, поэтому форма провисающей части цепи «б» не изменяется. Значит, сила натяже- ния цепи у входа в клюз и момент М ются ( рис. 12.5, а ). Стадия 1 заканчивается, когда с грунта будет поднято последнее свободно лежащее звено цепи. На этой стадии скорость выбирания якоря увеличивается, как правило, от 9 до 12 м / мин.
Рис. 12.5. Нагрузочные диаграммы электропривода брашпиля при подъеме одного ( а ) и двух ( б ) якорей
В течение стадии 2 брашпиль продолжает втягивать цепь в клюз, а судно продол- жает двигаться практически с неизменной скоростью вследствие приобретённой инерции. Натяжение цепи увеличивается и её форма в конце стадии провисающей части це пи «в» приближается к прямой. В конце стадии 2 двигатель может остановиться, если момент на валу электродвигателя недостаточен для отрыва якоря от грунта. Двигатель при этом переходит в режим стоянки под током, длительность которого ограничена Правилами Регистра до 30 с. На этой стадии момент на валу электродвигателя М М На стадии 3двигатель выбирает слабину цепи, образующуюся вследствие движе- ния судна по инерции. Значение момента на валу электродвигателя практически не изменя ется, т.е. равно М В конце стадии 3 судно проходит над местом залегания якоря и отрывает его от грунта. В результате момент электродвигателя скачкообразно уменьшается от значения М На стадии 4двигатель выбирает свободно висящую цепь, длина которой, находящаяся в воде, непрерывно уменьшается. Момент на валу электродвигателя постепенно уменьшается от значения М На этой стадии скорость выбирания якоря уменьшается, как правило, от 12 м/мин до 3 м/мин. Режим подъёма 2-х якорей В этом режиме якоря предварительно оторваны от грунта, а длина цепи в воде рав- на половине расчётной глубины стоянки. Начальный момент на валу электродвигателя, обусловленный суммарным весом якоря и цепи, составляет М После включения электродвигателя происходит плавный подъём якоря, момент электродвигателя уменьшается от значения М
Швартовный режим В этом режиме усилие на тросе может изменяться от нуля ( слабина троса ) до номинального значения. Кроме того, при рывках тяговое усилие в тросе может достигать значений, когда происходит остановка механизма. Однако продолжительность перегрузки обычно не пре вышает 4…7 с. Работа в швартовном режиме контролируется членами экипажа, и скорость на барабане может изменяться в пределах 7,2…18 м/мин.
23. Прочитать и объяснить нагрузочную диаграмму электропривода при работе одной лебедки; Электроприводы ГПМ работают в повторно-кратковременном режиме, который в соответствии с международной классификацией обозначается S3. Этот режим характеризуется частыми пусками и остановками электродвигателя ГПМ. В общем виде цикл работы грузовой лебедки состоит из следующих 8 операций: 1. подъем груза; 2. перенос груза в горизонтальной плоскости; 3. опускание груза; 4. расстройка груза; 5. подъем холостого гака; 6. обратное перемещение гака в горизонтальной плоскости; 7. опускание холостого гака; 8. застропка груза. Грузовые операции могут осуществляться одной лебедкой, двумя лебедками или грузовым краном. Для обоснованного выбора режима эксплуатации ЭП, а также для выбора ЭД по мощности необходимо прежде всего знать, как изменяется нагрузка на валу ЭД во вре- мени. С этой целью используют нагрузочные диаграммы, представляющие собой зависимость момента на валу двигателя от времени, т.е. М ( t ).

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|
 и силы течения воды Fт. Чем больше эти силы, тем силь
и силы течения воды Fт. Чем больше эти силы, тем силь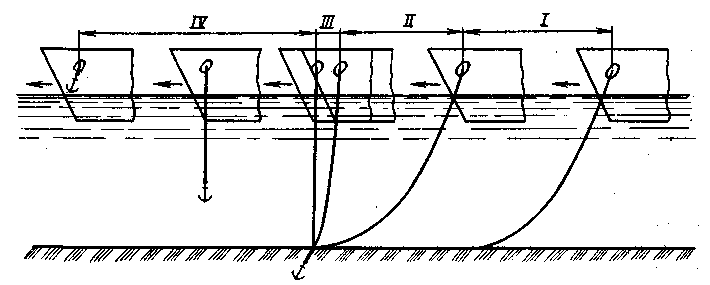
 на валу электродвигателя на этой стадии не изменя-
на валу электродвигателя на этой стадии не изменя-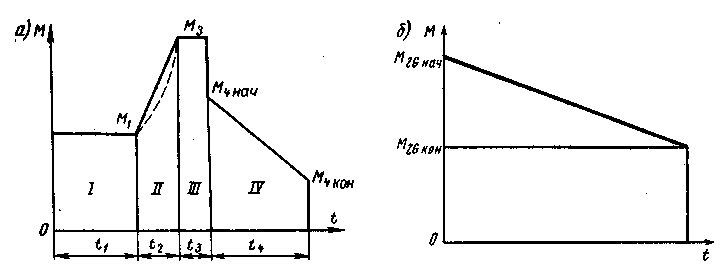
 увеличивался от значения
увеличивался от значения .
.
 .
. до значения М
до значения М  , при котором цепь полностью втянута в клюз. Двигатель при этом надо отключить от сети.
, при котором цепь полностью втянута в клюз. Двигатель при этом надо отключить от сети. ( рис. 12.5, б ).
( рис. 12.5, б ). .
.