
|
|
Слежение за нестационарным сигналомРассмотрим задачу отслеживания нестационарного гармонического сигнала, что может представлять реальный интерес на практике. Задана дискретная выборка T из гармонического сигнала длительностью 6 с, частота которого удваивается по истечении 4 с. Частота квантования для интервала времени от 0 до 4 с составляет 20 Гц, а для интервала от 4.05 до 6 с – 40 Гц. time1 = 0:0.05:4; time2 = 4.05:0.025:6; time = [time1 time2]; T = [sin(time1*4*pi) sin(time2*8*pi)]; Поскольку при синтезе сети будут использоваться адаптивные алгоритмы настройки, сформируем обучающую последовательность {P, T} в виде массива ячеек, при этом последовательность входов Р должна совпадать с последовательностью целевых выходов Т, поскольку рассматривается задача слежения: T = con2seq(T); P = T; plot(time, cat(2,T{:})) График гармонического сигнала показан на рис. 9.8.
Для решения поставленной задачи используется однослойная линейная сеть, которая предсказывает текущее значение сигнала по пяти предшествующим значениям. Инициализация сети Сеть состоит только из одного нейрона, так как требуется только одно значение
Для создания такой сети предназначена М-функция newlin; параметр скорости lr = 0.1; delays = [1 2 3 4 5]; net = newlin(minmax(cat(2,P{:})),1,delays,lr); [net,a,e] = adapt(net,P,T); Сформированная нейронная сеть имеет следующие весовые коэффициенты и смещение: net.IW{1} net.b ans = 0.39421 0.10682 –0.15592 –0.31476 –0.34523 ans = –4.5457e–006 Проверка сети Построим график выходного сигнала и сравним его с целевым сигналом (рис. 9.10): y = sim(net,P); plot(time,cat(2,y{:}), time,cat(2,T{:}),'.') % Рис.9.10 axis([0 6 –1.5 1.5])
Построим также график сигнала ошибки (рис. 9.11): plot(time,cat(2,e{:}))
Как следует из этого графика, для настройки на слежение нейронной сети требуется около 30 тактов (1.5 с) и далее до 4-й секунды сигнал отслеживается с высокой точностью. Затем целевой сигнал мгновенно изменяет частоту и нейронная сеть настраивается на новый сигнал за те же 30 тактов, но теперь это составляет 0.75 с. Это обусловлено тем, что частота съема увеличилась вдвое. Таким образом, линейная нейронная сеть успешно справляется с задачей слежения за гармоническим сигналом, если частота квантования синхронизирована с частотой наблюдаемых сигналов. Для настройки на новую частоту требуется всего 30 измерений; для типичных сигналов, возникающих в приложениях, обработка сообщений может производиться с частотой 20 кГц, при такой частоте 30 тактов настройки занимают 1.5 мс. Читатель может обратиться к демонстрационному примеру applin2, где исследуется подобная задача. Моделирование стационарного фильтра Одно из полезных применений нейронных сетей – это создание моделей динамических систем по наблюдаемым входным и выходным сигналам и их применение для последующего моделирования таких систем. Первая часть этой задачи, связанная с построением модели, известна также как задача идентификации. Если реальная система линейная или близка к линейной, Постановка задачи Допустим, что на вход фильтра подается входной сигнал вида r(t) = sin(10*sin(t)*t), заданный массивом значений R с тактом квантования 0.025 с на интервале 5 с: time = 0:0.025:5; R = sin(sin(time).*time*10); plot(time,R) axis([0 5 –1 1]); График этого сигнала показан на рис. 9.12.
Рассматривается линейный стационарный фильтр, описываемый следующим рекуррентным соотношением:
Это фильтр второго порядка, функционирование которого в системе MATLAB описывается следующей М-функцией: Y = filter([1 0.5 –1.5],1,R); plot(time,T) axis([0 5 –2 2]); График сигнала выхода этого фильтра показан на рис. 9.13.
Задача нейронной сети – сформировать такую линейную модель, которая в процессе обучения определяет параметры фильтра, а затем использует их для моделирования при произвольных значениях входа. Определим следующую обучающую последовательность: в качестве целевого выхода T примем массив Y, а входную последовательность P зададим на основе текущего и двух предшествующих значений входа R: T = Y; Q = size(R,2); P = zeros(3,Q); P(1,1:Q) = R(1,1:Q); P(2,2:Q) = R(1,1:(Q–1)); P(3,3:Q) = R(1,1:(Q–2)); Синтез сети Нейронная сеть должна иметь только 1 нейрон, потому что динамическая система имеет только 1 выход. Нейрон должен иметь 3 входа, чтобы получить текущий и 2 запаздывающих значения входного сигнала. М-функция newlind позволяет выполнить синтез такой нейронной сети: net = newlind(P,T); net.IW{1}, net.b ans = 1.0000 0.5000 –1.5000 ans = –7.4394e–017 Нетрудно убедиться, что сеть точно определяет параметры фильтра. Проверка сети Для проверки функционирования сети подадим входную последовательность Р a = sim(net,P); plot(time,T, 'Color', [0 0.8 0.8], 'LineWidth',3),hold on plot(time,a, 'k'), grid on axis([0 5 –2 2]); % Рис.9.14
Сеть выполняет поставленную задачу. Погрешность моделирования показана на рис. 9.15 e = T–a; plot(time, e)
Построенная линейная нейронная сеть может быть использована для идентификации и моделирования динамических систем, причем для линейных систем погрешности близки к 0. Для нелинейных систем такой подход при достаточно малых амплитудах входного сигнала обеспечивает линеаризацию с минимальной среднеквадратичной ошибкой. Если нелинейная система переместится в другую рабочую точку, то изменятся и параметры нейронной сети. Для того чтобы получить линеаризованную модель за короткое время, частота замеров должна быть достаточно высокой, а на вход нелинейной системы необходимо подать пробный сигнал в виде случайного процесса небольшой амплитуды. Это ускорит адаптацию сети, поскольку большее количество измерений, характеризующих динамику системы, будет представлено на коротком интервале времени. Учет в случае нелинейных систем большего числа запаздывающих входов позволяет минимизировать ошибку при моделировании нелинейной системы. Если система характеризуется существенной нелинейностью, то более подходящими будут сети с обучением методом обратного распространения ошибки или радиальные базисные сети. Читатель может обратиться к демонстрационному примеру applin3, где рассмотрена подобная задача. 
Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|
 Рис. 9.8
Рис. 9.8 Рис. 9.9
Рис. 9.9 Рис. 9.10
Рис. 9.10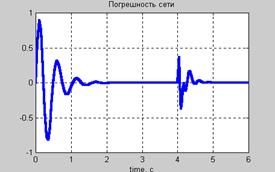 Рис. 9.11
Рис. 9.11 Рис. 9.12
Рис. 9.12 (9.2)
(9.2) Рис. 9.13
Рис. 9.13 Рис. 9.14
Рис. 9.14 Рис. 9.15
Рис. 9.15