
|
|
Привязка теодолитных ходов
Целью привязки теодолитных ходов к пунктам Государственной геодезической сети 1, 2, 3 и 4 классов, а также к пунктам съёмочной сети 1 и 2 разрядов является определение с заданной точностью координат вершин указанных ходов. В зависимости от расположения теодолитного хода на местности, условий съёмки, сложности ситуации и других факторов схемы и способы привязки элементов теодолитного хода могут быть различными. Во многих случаях приходится выполнять дополнительные геодезические построения. Тем более, что любая привязка должна иметь надёжный контроль, который, чаще всего, обеспечивается избыточными измерениями и дополнительными геодезиическими построениями. Под элементом теодолитного хода понимают одну из его определяемых точек, координаты которой необходимо найти, и дирекционный угол линии теодолитного хода, исходящей из определяемой точки. Здесь будут рассмотрены некоторые из основных способов привязки теодолитных ходов, которые чаще всего встречаются на практике, приведены схемы, предусматривающие комбинированное использование способов привязки. Однако следует иметь в виду, что на практике могут встретиться случаи, когда ни один из рассмотренных способов не может быть выполнен в силу действия различных факторов. Геодезист и маркшейдер должны уметь проектировать частные схемы привязок, которые обеспечат построение съёмочного обоснования с необходимой точностью.
73.1. Способ примыкания На рис. 7.2 приведены сравнительно простейшие способы привязки теодолитных ходов. Для разомкнутого хода – это привязка начальной и конечной линий оптимально к двум исходным направлениям с включением пункта высокого класса в теодолитный ход в местах примыкания. Замкнутый теодолитный ход может быть привязан на два исходных направления с включением пункта высокого класса непосредственно в ход (рис. 7.2 б) либо с помощью дополнительного полигонометрического хода (рис. 7.2 в) от исходных пунктов (привязка ходом). Методика выполнения привязки с помощью указанных схем следующая.
Рис. 7.5. Привязка разомкнутого и замкнутого теодолитных ходов: разомкнутый ход (а), замкнутый ход (б).
Привязка разомкнутого теодолитного хода на двух его концах выполняется с использованием примычных (горизонтальных) углов γ1, γ2, γ3 и γ4 (рис. 7.5). В результате дважды определяют дирекционные углы направлений А-1 и n-D.
где αВА , αСА , αDE , αDF – дирекционные углы исходных направлений (находят из решения обратных геодезических задач по координатам исходных пунктов); на схеме углы γ1 и γ2 – левые по ходу, углы γ3 и γ4 – правые по ходу. Если разница полученных дирекционных углов допустима (для технических теодолитных ходов – не более 1'), т.е.
то вычисляют средние арифметические значения углов
и в дальнейшем принимают их за исходные. Аналогично выполняют привязку линии А1 в замкнутом теодолитном ходе (рис. 7.5 б). Примычные углы измеряют теодолитом повышенной точности, чем рекомендуемый для измерений в теодолитных ходах. Иногда приходится пользоваться для измерения примычных углов и для измерения горизонтальных углов в вершинах хода одним и тем же теодолитом. В этом случае примычные углы измеряют несколькими полными приёмами каждый (3 – 5 полных приёмов с перестановкой лимба горизонтального круга и с повторным центрированием и горизонтированием теодолита перед каждым приёмом). Целесообразно, чтобы примычные углы имели вес в 1,5 – 3 раза больший, чем вес углов дальнейших геодезических построений.
73.2. Прямая угловая засечка
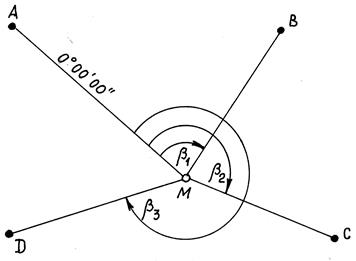
Положение точки М теодолитного хода определяют из решения треугольников АВМ и ВСМ по результатам измерения горизонтальных углов β1, β2, β3 и β4 при исходных направлениях АВ и ВС (рис. 7.6 а). Горизонтальный угол β5 , измеренный в вершине М между направлениями ВМ и МN, используют для передачи дирекционного угла с направления ВМ на линию теодолитного хода MN.
Рис. 7.6. Прямая угловая засечка: а) схема 1; б) схема 2.
Координаты точки М чаще всего вычисляют по формулам Юнга:
Для контроля аналогичные вычисления выполняют из решения второго треугольника. Точность определения прямоугольных координат не должна быть меньше установленной инструкцией. Для передачи дирекционного угла на линию MN из решения обратной геодезической задачи вычисляют дирекционный угол направления BM (αBM), а затем получают дирекционный угол αMN по формуле αMN = αВM + 180о - β5 . (7.18) На схеме привязки горизонтальный угол β5 является правым по ходу ВMN, поэтому в формуле (7.18) перед ним стоит знак минус. Часто прямую угловую засечку выполняют сразу для двух точек, М и N. Тогда координаты точки N определяют так же, как и координаты точки М, а значение горизонтального угла β5 используют как контрольное. Аналогичный угол целесообразно измерить и в точке N. Оценка точности определения координат пункта M относительно исходных пунктов А, В и С выполняется по следующим формулам:
где mM(1) и mM(2) – соответственно средние квадратические погрешности определения положения точки М из первого и второго треугольников; mβ – средняя квадратическая погрешность измерения горизонтального угла (сек); ρ" = 206265" – число секунд в радиане; S – расстояния (горизонтальные проложения) между исходными пунктами и определяемой точкой, вычисляемые по теореме синусов в соответствующем треугольнике. При проектировании рассмотренной схемы привязки следует стремиться к тому, чтобы горизонтальные углы γ при определяемой точкебыли не меньше 30о и не больше 150о. Большая точность достигается при углах γ в пределах 109о – 110о при примерно равных расстояниях до неё от исходных пунктов..
Пример 7.4.Привязка способом прямой угловой засечки. Исходные данные (схема рис. 7.6 а): ХА = 3946,547 м ; ХВ = 3763,211 м ; ХС = 4015,338 м ; YA = 4105,854 м ; YВ = 4568,642 м ; YС = 4905,039 м ; β1 = 63018'10"; β2 = 59044'58"; β3 = 61047'20"; β4 = 70003'50"; β5 = 86055'45". Решение. Из треугольника АВМ (1):
Аналогичные вычисления выполняем в треугольнике ВСМ (2): ХМ(2) = 4287,7594 м ; YM(2) = 4488,9353 м. В результате получены невязки в координатах: fX = XM(1) – XM(2) = 0,0054 м; fY = YM(1) – YM(2) =0,0074 м; fАБС = 0,00916 м. Значение fАБС является критерием качества решения задачи привязки. При допустимом значении абсолютной невязки вычисляют среднее значение координат точки М: ХМ = 4287,762 м ; YM = 4488,939 м. Выполним оценку точности засечки по формулам (7.19) – (7.21), приняв mβ = 2,0". Из решения обратной геодезической задачи с точностью до 1 м вычислим значения S 1 ≈ 513 м, S2 ≈ 531 м, S3 ≈ 497 м (для оценки точности определения координат указанного округления до 1 м достаточно). Значения sin для оценки точности округлим до 0,50.
Средняя погрешность засечки Здесь следует сделать некоторые замечания. 1. Средняя погрешность по значению меньше частных погрешностей, полученных по оценкам в соответствующих треугольниках. Это полностью согласуется с положениями теории погрешностей (гл. 3). Координаты точки М получены независимо из решения двух треугольников, т.е. определены дважды. В связи с этим средняя погрешность относится к значениям средних арифметических координат точки М. 2. Практическая погрешность (невязка) составила порядка 9 мм, т.е. на 3 мм больше. Оценка точности выполнялась по теоретическим формулам, для идеального случая, когда влияние других погрешностей исключается, не учитывается. При выполнении практических работ в результатах измерений содержатся и другие погрешности, что и повлияло на окончательное практическое значение точности определения координат точки М. При этом следует иметь в виду, что все погрешности имеют вероятностный характер, и не исключено, что оценочные их значения могут в каких-то случаях оказаться и больше, чем их практические величины. Вычислим дирекционный угол направления MN. Из решения обратной геодезической задачи по координатам точек В и М вычислим значение дирекционного угла направления ВМ:
Часто видимость между пунктами А – В и В – С может отсутствовать. В этом случае возможно использование другой схемы прямой угловой засечки (рис. 7.6 б), решение которой выполняется по формулам Гаусса (тангенсов или котангенсов). Формулы тангенсов:
Формулы котангенсов:
Для контроля выполняют аналогичную привязку с точек В и С. Значения дирекционных углов в приведенных формулах получают в результате решения азимутальной привязки от соответствующих исходных направлений: αАМ = αАD ± β1 , (7.26) αBМ = αBE ± β2 , (7.27) αCМ = αCF ± β3 . (7.28) Знак «плюс» - для левых по ходу углов (как это показано на рис. 7.4), знак «минус» - для правых по ходу углов. На схеме рис. 7.6 б горизонтальные углы – левые по ходу. При использовании для вычислений микрокалькуляторов формулы тангенсов не следует применять, если дирекционные углы близки к 90о ± 5о или 270о ± 5о, а формулы котангенсов – если дирекционные углы близки к 0о ± 5о или 180о ± 5о. Это обязательно следует проверить и, при возможности, перейти к другим построениям. В любом случае использование приведённой схемы привязки необходимо начинать с вычисления (или с оценки) величин дирекционных углов.
73.3. Линейная засечка Этот способ часто используют в тех случаях, когда имеется возможность измерения расстояний S светодальномером либо непосредственно компарированной рулеткой в одно уложение (рис. 7.7). Такие схемы обычно используют при небольших расстояниях между пунктами А и В, расположенными, например, на углах здания, и сравнительно большом расстоянии между пунктами В и С (в этом случае используют дополнительную точку Т, закрепляемую в створе линии ВС). Кроме того, при большом расстоянии между точками А и В можно и между ними (в створе) выбрать в удобном месте дополнительную точку при соблюдении примерного равенства расстояний S. Значения координат точки М вычисляют по формулам:
где
Формулы (7.29) и (7.30) используют в том случае, когда точка М находится слева от направления из точки А на точку В. В связи с этим перед вычислениями необходимо составить схему расположения точки М относительно исходных точек А и В и учесть это при записи разностей координат Х и Y.
Рис. 7.7. Линейная засечка.
Задача решается дважды относительно точек А и В и точек В и С (Т). Часто решение линейной засечки выполняют по несколько измененным формулам:
где Значение h берут со знаком «плюс», если точка М находится слева от направления из точки А на точку В. Если точка М находится справа от указанного направления, то значение h берут со знаком «минус». Приближённая оценка точности произведенной линейной засечки может быть выполнена по формулам:
где mS / S – относительная погрешность измерения линий; γ – угол засечки при определяемой точке (его вычисляют по теореме косинусов в соответствующем треугольнике). Углы при определяемой точке не должны быть меньше 30о и более 150о. Большая точность достигается при углах γ в пределах 90о.
Пример 7.5.Привязка способом линейной засечки. Исходные данные (схема рис.7.7): ХА = 4365,848 м ХВ = 4411,185 м ХС = 5641,756 м YA = 6513,603 м YВ = 6786,445 м YС = 8136,097 м S1 = 211,423 м; S2 = 268,505 м; S3 = 379,666 м; S4 = 220,344 м. Стороны измерены с относительной погрешностью 1:10000. Решение. Из решения обратной геодезической задачи находим:
Определяем координаты точки Т (прямая геодезическая задача):
Воспользуемся формулами (7.29) и (7.30). Для треугольника АВМ: n = 24551,453 ; D = 53072,306. ХМ(1) = 4569,689 м ; YM(1) = 6569,716 м Для треугольника ВМТ: n = -11749,929 ; D = 57984,954. ХМ(2) = 4569,717 м ; YM(2) = 6569,737 м. Невязки в координатах:
Если это условие удовлетворяет необходимой точности привязки, то вычисляют средние значения координат точки М: ХМ = 4569,703 м; YМ = 6569,727 м. Выполним оценку точности определения координат точки М по формуле (7.34). Для этого по теореме косинусов найдем углы γ в треугольниках АМВ и ВМТ при точке М (вычисления достаточно выполнить с точностью до 0,50): γ1 = 69,20; γ2 = 34,70.
Из треугольников АВМ и ВМТ соответственно получим: mM1 = 0,037 м; mM2 = 0,082 м; средняя погрешность mM = 0,5 73.4. Обратная угловая засечка Привязка способом обратной угловой засечки может быть выполнена по трём исходным геодезическим пунктам, если определяемая точка не лежит на окружности, описанной по ним. Оптимально, когда определяемая точка находится внутри треугольника примерно на равных расстояниях от его вершин (рис. 7.8 а). Удаление точки М от опасной окружности на 10% её радиуса уже обеспечивает решение задачи определения координат искомой точки. Для графической оценки положения точки М составляют схему привязки и контролируют выполнение условия Следует иметь в виду, что в данном случае не обеспечивается надёжный контроль привязки, поэтому целесообразно использовать для решения указанной задачи четыре исходных пункта, т.е. в определяемой точке необходимо ещё измерить угол β3 на исходный пункт D.
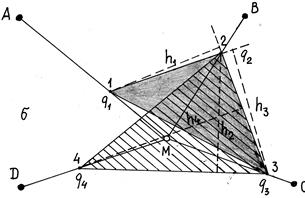
Рис. 7.8. Обратная угловая засечка. Схема обратной угловой засечки (а). Построение инверсионных треугольников (б).
Координаты точки М находят по формулам С.Г.Молочкова:
где
При наличии четвёртого пункта (D) координаты точки М могут быть получены дважды: при использовании пунктов D, A и B и при использовании пунктов А, В и С. При этом может оказаться, что точность определения координат будет различной, в связи с чем целесообразно установить, относительно каких пунктов следует определять координаты точки М, а какой из пунктов будет контрольным. Указанная задача решается методом инверсионных треугольников. Построение инверсионных треугольников выполняется на графической схеме привязки, построенной в произвольном масштабе длин, но с таким расчётом, чтобы отрезки S были не менее 6 – 7 см. На этих отрезках откладывают в принятом масштабе значения параметров qi (градиентов):
Получают соответствующие инверсионные треугольники: 123 – для пунктов D, A и B и 234 – для пунктов А, В и С (рис. 7.8 б). Из точек 1, 2, 3 и 4 опускают высоты hi на соответствующие стороны и графически, в масштабе q, получают их значения. Графическая оценка точности выполняется по формулам:
где М – средняя квадратическая погрешность определения координат точки М; mβ – средняя квадратическая погрешность измерения углов. По минимальной величине М выбирают исходные пункты для вычисления координат по формулам (7.35) и (7.36). Иногда координаты определяют два раза, по двум группам из трёх исходных пунктов, а оценку погрешности выполняют по средней её величине, как это делалось в предыдущих способах. Контроль вычислений по четвёртому исходному пункту выполняют сравнением измеренного горизонтального угла (или углов, если пунктов более четырёх) с вычисленным его значением. Например, если контрольное направление выбрано на пункт D, то сравнивают
с тем же горизонтальным углом, измеренным в поле. Разница в полученных углах является критерием качества привязки. Для теодолитных ходов указанная разница не должна превышать 1'. Передача дирекционного угла на определяемую линию MN выполняется с учётом значения горизонтального угла β4 (правого или левого по ходу). Аналитическая оценка точности определения координат точки М (линейная погрешность mM) может быть выполнена по формуле
где
Пример 7.6.Привязка способом обратной угловой засечки. Исходные данные (схема рис. 7.8): XA = 5535,793 м ; ХВ = 5633,352 м ; ХС = 2490,280 м ; ХD = 2385,336 м YА = 3733,771 м ; YВ = 7984,056 м ; YС = 8879,172 м ; YD = 3694,242 м β1 = 84о41'48" ; β2 = 81о13'25" ; β3 = 138о50'16" ; β4 = 32о36'18" Решение. По схеме, построенной в произвольном масштабе, но с соблюдением её геометрии по горизонтальным углам, получим длины отрезков S в мм и в метрах: S1 = 72,5 мм (3625 м); S2 = 54,0 мм 2700 м); S3 = 51,3 мм (2565 м); S4 = 59,2 мм (2960 м). По формуле (7.37) вычислим значения градиентов (q1 = 56,9; q2 = 76,4; q3 = 80,4; q4 = 69,7) и построим их величины на схеме по соответствующим сторонам в условно выбранном масштабе. Получатся точки 1, 2, 3 и 4. В результате образованы два инверсионных треугольника 123 и 234. Построим в инверсионных треугольниках высоты hi и графически в масштабе q измерим их значения: h1 = 91,0; h2 = 90,0; h3 = 97,0; h4 = 132,0. Принимая mβ = 2,0" (здесь необходимо учитывать фактическую точность измерения углов), по формулам (7.38) вычислим значения средних квадратических погрешностей: М1 = 0,030 м; М2 = 0,027 м. Поскольку М2 меньше М1, то целесообразно для вычисления координат точки М использовать второй инверсионный треугольник (234), т.е. использовать для вычислений координат исходные точки В, С и D. Далее решаем задачу по формулам Молочкова (7.35) и (7.36) для установленных исходных пунктов:
Контроль привязки выполняем по направлению на четвёртый исходный пункт А. Из решения обратной геодезической задачи найдем дирекционные углы направлений MА и МВ: Как видим, различие составляет всего 0,5", что для данных условий вполне допустимо. Аналитическая оценка точности определения координат точки М по формуле (7.40) дает значение М = 0,0279 м = 28 мм. Все параметры, входящие в формулу (7.40), получены из решения обратной геодезической задачи по соответствующим направлениям (
Аналогичная задача привязки точки М (задача обратной однократной засечки) может быть решена по формулам И.Ю.Пранис-Праневича. Она решается для трёх исходных пунктов и двух измеренных горизонтальных углов в определяемой точке. Например, в соответствии со схемой рис. 7.8, для исходных пунктов А, В и С и измеренных углов β1 и β2 координаты точки М вычисляют по формулам:
где
Пример 7.7.Обратная однократная засечка (использование формул И.Ю.Пранис-Праневича). Исходные данные примера 7.6. Решение (для исходных пунктов А, В и С). ctgαBM = (- 2789?170172)/(-4651,097936) = +0,599679949 (третья четверть – ЮЗ). N = 398,5895246 + (- 3434,064933) = - 3035,475409. ХМ = 3400,754 м ; YМ = 6645,212 м. Различия в значениях координат точки М по сравнению со значениями, полученными в примере 7.6, объясняются другими погрешностями измерений в схеме АВС по сравнению со схемой ВСD.
Такая же задача способом обратной однократной засечки может быть решена по измеренным направлениям (рис. 7.9) по формулам Деламбера.
Рис. 7.9. Обратная однократная угловая засечка по измеренным направлениям.
Для указанной засечки необходимо иметь четыре исходных пункта, наблюдаемых с точки М. Горизонтальные измеренные углы β приводят к какому-либо начальному направлению на исходный пункт, например, на пункт А. Значения координат точки М вычисляют дважды по двум последовательным схемам: АВС и ВСD. При этом в схеме АВС за начальное направление принимают МА, а в схеме BCD – МВ. Из схемы АВС:
где
Аналогичные формулы, в соответствии со схемой привязки, составляют и для группы точек BCD.
Пример 7.8.Обратная однократная засечка по измеренным направлениям. Исходные данные (см. пример 7.6). Решение(для схемы АВС). В соответствии с рис. 7.8 и 7.9, в схеме АВС β1 = 84041'48" ; β2 = 165055'13"; β3 = 304045'29"; Тогда tgαАМ = -1,363648006 (вторая четверть – ЮВ), αАМ = 126о15'13"; αВМ = 210о57'01"; αСМ = 292о10'26"; αDМ = 71о00'42". В результате получены значения координат ХМ = 3400,754 м, YМ = 6645,212 м. То есть такие же, как и при вычислениях по формулам И.Ю.Пранис-Праневича.
73.5. Комбинированные засечки
Кроме рассмотренных выше схем привязки используются схемы комбинированной засечки (рис. 7.10).
Рис. 7.10. Комбинированные засечки.
В схеме рис. 7.10 а положение точки М определяют способом обратной угловой засечки по углам β1 и β2 и для контроля – способом прямой угловой засечки по углам β3 и β4. При этом, например, угол β4 можно не измерять, а вычислить из треугольника АВМ по углам β1 и β3. В схеме рис. 7.10 б дважды вычисляют дирекционный угол линии ВМ от направлений АВ и ВС, находят его среднее значение. Используя затем углы β1 и β2, находят дирекционные углы линий МD и МЕ. Далее по формулам Гаусса вычисляют координаты точки М из двух вариантов: относительно пунктов В и Е и затем пунктов В и D. Часто привязку целесообразно выполнять для двух точек одновременно, включённых в определяемую линию теодолитного или полигонометрического хода. Такие привязки используются, например, в схемах, приведённых на рис. 7.10 в, г, д. В схеме рис. 7.10 в координаты точек М1 и М2 определяют обратной засечкой по трём исходным пунктам, а координаты вспомогательной точки D – прямой засечкой с точек М1 и М2 и одного исходного пункта. Обычно координаты точки D определяют с пунктов М1 и А по формулам Юнга, а относительно точек М1 и М2 – по формулам тангенсов или котангенсов (контрольное вычисление). Схемы рис. 7.10 г и д используют при густой сети исходных пунктов. В схеме рис. 7.10 г координаты точки М1 определяют по четырём исходным пунктам, а координаты точки М2 по трём исходным пунктам и точке М1. В схеме рис. 7.10 д, при отсутствии видимости между определяемыми пунктами, выбирают вспомогательную точку D. При этом координаты точек М1 и М2 находят по трём исходным пунктам, а координаты точки D – прямой засечкой с точек М1 и М2 и одного исходного пункта.
Схема рис. 7.11 представляет собой т.н. геодезический четырехугольник. При этом в указанной схеме подбирают такое положение точек M и N , чтобы все углы, кроме β1, были не менее 200. В замкнутом треугольнике BCD при использовании линии MD в теодолитном ходе, угловая невязка не должна превышать 1,5'. Сначала, после уравнивания углов β2, β4, β5 и β7, вычисляют координаты точки D, а затем, из двух вариантов по формулам прямой угловой засечки, координаты точки М.
73.6. Задача П.А.Ганзена
Такую задачу (задачу о двух точках) решают при наличии всего двух исходных пунктов (рис. 7.12). В этой схеме измеряют углы β5, β6, β7, и β8 при определяемых точках М и С. Из треугольников АСМ и ВСМ вычисляют углы β3 и β4. Значения углов β1 и β2 находят по формулам:
Контролем вычислений является равенство: β1 + β2 = β7 + β8. Далее решают прямые угловые засечки из треугольников АМВ и АВС. Для контроля вычисляют дирекционные углы линии СМ и направлений с определяемых точек на исходные пункты. По разностям дирекционных углов контролируют значения углов β.

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|

 ,(7.12)
,(7.12) ,(7.13)
,(7.13) , (7.14)
, (7.14) (7.15)
(7.15)

 , (7.16)
, (7.16) .
.  (7.17)
(7.17) , (7.19)
, (7.19) , (7.20)
, (7.20) , (7.21)
, (7.21)
 .
. .
. .
. .
.

 , (7.22)
, (7.22) . (7.23)
. (7.23) , (7.24)
, (7.24) . (7.25)
. (7.25) , (7.29)
, (7.29) , (7.30)
, (7.30) ,
, .
.
 , (7.31)
, (7.31) , (7.32)
, (7.32) ,
,  ,
,  .
. , (7.33)
, (7.33) , (7.34)
, (7.34) ;
;  ; SАВ = 276,583 м.
; SАВ = 276,583 м.




 = 0,045 м.
= 0,045 м. .
.
 , (7.35)
, (7.35) , (7.36)
, (7.36) ;
; ;
; ;
;  .
. ;
; . (7.37)
. (7.37) ;
;  , (7.38)
, (7.38) (7.39)
(7.39) , (7.40)
, (7.40) при использовании пунктов А, В и С; S и L определяют из решения обратной геодезической задачи.
при использовании пунктов А, В и С; S и L определяют из решения обратной геодезической задачи. = + 3004,8784 ;
= + 3004,8784 ; = - 1380,3631 ;
= - 1380,3631 ; = - 6035,5272 ;
= - 6035,5272 ; = - 5064,8938 ;
= - 5064,8938 ; 3400,759 м,
3400,759 м, = 3400,759 м ,
= 3400,759 м , = 6645,210 м .
= 6645,210 м . ;
;  . Проверяем разность
. Проверяем разность  :
:  .
. ; S2 = 2603,263 м; S3 = 2412,376 м; S4 = 3120,785 м; L3 = 3268,047 м; L4 = LСD = 5185,992 м). При этом значение М вычислено с учётом определения координат через исходные пункты В, С и D по формуле
; S2 = 2603,263 м; S3 = 2412,376 м; S4 = 3120,785 м; L3 = 3268,047 м; L4 = LСD = 5185,992 м). При этом значение М вычислено с учётом определения координат через исходные пункты В, С и D по формуле .
. , (7.41)
, (7.41) , (6.42)
, (6.42) ;
; .
.
 , (7.43)
, (7.43) ;
; ;
;  ;
;  .
.

 Рис. 7.11. Геодезический четырехугольник.
Рис. 7.11. Геодезический четырехугольник.
 Рис. 7.12. Задача П.А.Ганзена.
Рис. 7.12. Задача П.А.Ганзена.
 , (7.45)
, (7.45) . (7.46)
. (7.46)