
|
|
Существующие типы конвейеров
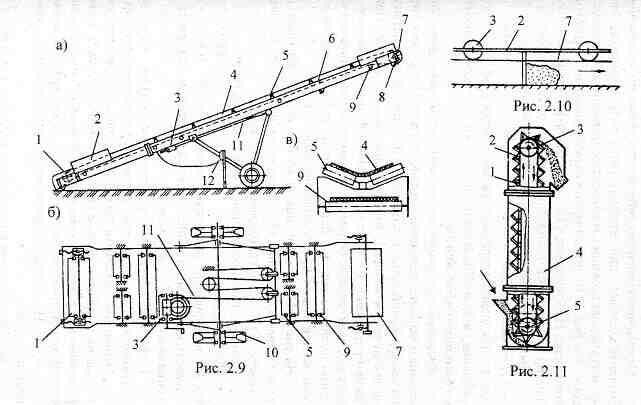
Пластинчатые конвейеры применяют для перемещения штучных и навалочных грузов, крупнокускового камня, а также на складах. Пластинчатый конвейер включает тяговый рабочий орган в виде пластинчато-роликовой цепи, приводимой в движение звездочками за счет осей с колесами, перекатывающимися по рельсам. К тяговому органу неподвижно укреплены грузонесущие пластины. Скребковые конвейеры работают по принципу волочения насыпного, кускового или штучного груза по неподвижному желобу, в трубе при помощи скребков, смонтированных па тросе или цепи. На рисунке 32 представлена схема (фрагмент) скребкового конвейера: 1 - скребок; 2 -цепь (канат) тяговая; 3 - каток (ролик) несущий; 4 - направляющая; 5 - днище желоба.
v - скорость движения, м/с; р - плотность груза, т/м3;
Подвесные конвейеры применяют на складах и объектах бытового обслуживания, домостроительных комбинатах и др. Основным элементом подвесного конвейера являются подвесные пути, обычно прикрепляемые к потолку или к балкам, укрепленным в стенах. По этим путям с помощью тяговой цепи или каната перемещаются каретки. Цепь приводится в. движение звездочкой. На каретках подвешены крюки или захваты для крепления грузов. Основными достоинствами этих конвейеров являются компактность, простота конструкций, надежность, безопасность. Производительность подвесного конвейера (шт/ч):
где vТ - скорость конвейера, м/с (менее 0,5); п - число штучных грузов; а - шаг грузонесущих подвесок, м. Винтовой конвейер работает от электромотора через редуктор (см. рисунок 33 - а), имеет рабочий орган в виде шнека, вращающегося в закрытом желобе на опорах. Эти конвейеры применяют для перемещения непрерывным потоком сыпучих и тестообразных материалов (цемента, песка, бетонной смеси и т.д.) на расстоянии до 40м по горизонтали или под углом до 20°. В начале желоба сверху имеется загрузочная воронка, а в конце снизу - разгрузочное отверстие. Винтовой конвейер составляется из секций длиной 2 - 4м, в местах стыковки секций смонтирована опора шнека. Диаметр шнека 0,1 - 0,8м. Конструктивно шнек выполняется правого или левого вращения, сплошным (для сыпучих материалов рисунок 33 - б), ленточным (для крупнокусковых рисунок 33 - в), фасонным (для мокрых, слежавшихся материалов) или лопастным (для бетонных смесей рисунок 33 - г). На рисунке 33 - а представлена схема винтового конвейера и типы рабочих органов: 1 - электромотор; 2 - редуктор; 3 -желоб; 4 - опора промежуточная; 5 - шнек; 6, 7 -воронкизагрузочная и разгрузочная. Производительность винтового конвейера (м /ч) определяется по формуле:
где Fсеч - площадь поперечного сечения материала в желобе, м2;
S - шаг винта, м; n - частота вращения винта, 40 - 120 мин-1. Достоинствами винтовых конвейеров являются надежность в работе при транспортировке пылевидных и сыпучих материалов, компактность и удобство загрузки и выгрузки; недостатками повышенная энергоемкость, ограниченная длина, заклинивание шнека при перегрузках и интенсивное изнашивание лопастей шнека.
Рисунок 33. Винтовой конвейер и типы рабочих органов: 1 - электромотор; 2 - редуктор; 3 -желоб; 4 - опора промежуточная; 5 - шнек; 6, 7 -воронкизагрузочная и разгрузочная Гравитационные конвейеры широко распространены на строительных площадках. К ним относятся спускные желоба, лотки и трубы, каскадные и винтовые спуски. Спускные желоба и трубы (которые неподвижны при работе) используют для раздачи бетонной смеси, для выгрузки мусора. Достоинства таких конвейеров в том, что они не имеют приводов и просты по конструкции; недостатки - ограниченная длина и трудноуправляемая скорость движения груза. Производительность гравитационного конвейера (т/ч) определяется:
где kн - коэффициент наполнения желоба; Vcр - средняя скорость движения груза, м/с; р - плотность материала, т/м3 ; А - площадь сечения желоба, м2. Роликовые конвейеры (рольганги) применяют для транспортирования штучных грузов. Основной частью конвейера является рама, на которой при помощи подшипниковых узлов смонтированы цилиндрические ролики. Ролики могут быть свободного качения или иметь электромеханический привод. В случаях транспортировки легкоповреждаемых грузов используют конвейеры с роликами, имеющими обрезиненную поверхность.Длятранспортирования круглых предметов ролики изготовляют с вогнутой (желобчатой) поверхностью. В большинстве случаев ролики имеют диаметр 0,40 - 1,50м, длину 0,16 - 1,20м, при этом максимально допустимая нагрузка на один ролик в зависимости от их диаметра составляет 1 - 20кН. Движение тяжелых предметов от действия сил гравитации осуществляется при угле наклона конвейера до 1,5, а легких - до 5°. Вибрационные конвейеры используются для перемещения сыпучих или штучных грузов по днищу колеблющегося в определенном направлении желоба или трубы. Источником колебаний является вращающаяся неуравновешеннаямасса. Амплитуда колебаний обычно 0,005 - 0,015м и частота 50-7Гц соответственно. В процессе транспортирования материал подбрасывается вверх под действием вибрации и постоянно движется вдольпо наклонному желобу под углом - 12°. Износ желоба при этом весьма незначителен. Длина конвейера - до 60м. Существенным недостатком вибрационных конвейеров являютсяих шум при работе, невозможность, транспортирования липких материалов, необходимость сооружения массивных фундаментов. Качающиеся конвейеры имеют амплитуду качания 0,1 - 0,2м,при частоте 8-10Гц. Транспортирующий желоб монтируется на роликах, перекатывающихся по рельсам, или подвешивается на рычагах. Возвратно-поступательное движение желоб получает от кривошипно-шатунного механизма или эксцентрика. Лекция 6. Вспомогательное грузоподъемное оборудование Мачтовые подъемники
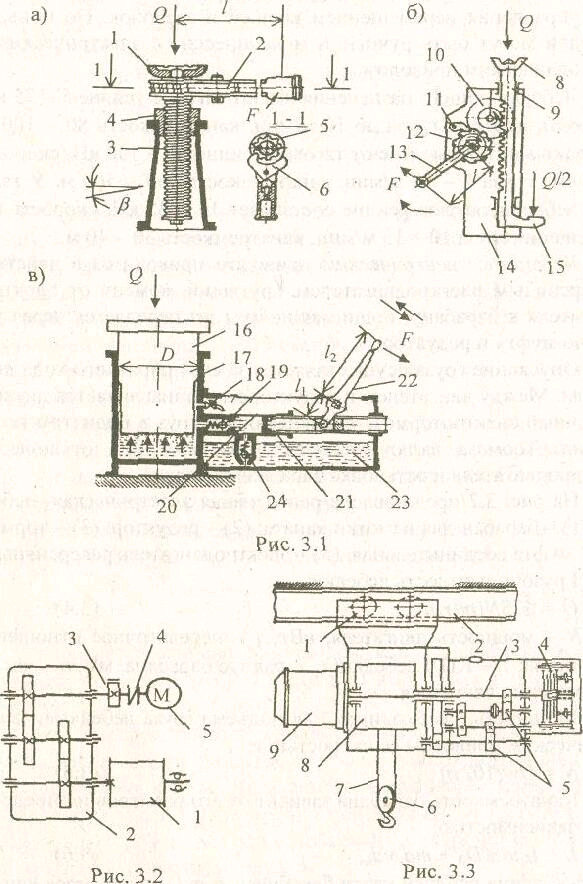
Подъемники - это грузоподъемные машины, используемые для подъема различных грузов и людей в вертикальном направлении. Рабочим органом у подъемников являются ковши, платформы, клети, бадьи, кабины, которые перемещаются по направляющим, или кабины грузопассажирского лифта. По конструкции подъемники разделяются на: · · шахтные; · скиповые. Мачтовые подъемники применяются для подачи грузов массой до 1т на высоту до 48м. Штучные грузы располагают на площадке, а сыпучие, бетонные смеси и растворы - в ящиках или бадьях. Подъемник состоит из опорной рамы, направляющей мачты, подъемной грузовой платформы с тележкой, перемещаемых с помощью каната и направляющих мачты. Подъем и опускание грузовой платформы осуществляются электрореверсивной лебедкой. Опорная рама с транспортным колесом имеет выдвижные опоры.
По конструкции мачты различают подъемники одностоечные (с одной мачтой) и двухстоечные (с двумя направляющими мачтами), представляющие собой решетчатые конструкции прямоугольного или треугольного сечения с направляющими для роликов грузонесущего рабочего органа. Подъемники изготовляют свободностоящими при высоте мачты до 12м и приставными (прикрепленными к зданию) при большей высоте вертикальной мачты. Свободностоящие подъемники применяются при строительстве зданий малой этажности, имеют неразборную мачту, жесткую платформу и выполняются подвижными. Грузоподъемность подъемников 300 - 500кг, высота подъема, груза до 50м со скоростью 0,3 - 0,5м/с. При возведении зданий высотой 15-30 этажей широко применяются грузопассажирские подъемники, используемые для подъема строительных конструкций, сантехнического оборудования и рабочих. Грузоподъемность таких подъемников составляет до 1000кг или 10 - 12чел, высота подъема до 110м, скорость подъема 0,5 - 0,6м/с. Ковшовые (скиповые) подъемники применяются" для подачи сыпучих и мелкокусковых материалов (песка, цемента, извести, щебня) в бункера смесительных машин и другие емкости. Ковш поднимается канатом лебедки по направлению мачты. Объем ковша этих подъемников не превышает 1м. Четырехстоечные подъемники называют шахтными и применяют для подъема и опускания растворов, бетонных смесей, а также мелких штучных грузов и малогабаритных строительных конструкций. Основной узел таких подъемников - вертикальная сборно-секционная шахта прямоугольного сечения, внутри которой по направляющим при помощи лебедки перемещается грузовая клеть. Грузоподъемность клети достигает 1т, скорость подъема груза 0,5 - 1,5м/с.
Монтажные вышки
Основой его конструкции является стойка, складывающаяся шарнирная мачта с двумя люльками. Мачта может поворачиваться на 360° в горизонтальной плоскости поворотными устройствами и вертикальной плоскости гидроцилиндром. Это позволяет перемещать люльки в различных направлениях и на различную высоту. Управление подъемником производится от выносного пульта. Безопасность эксплуатации подъемников обеспечивается ограничителями грузоподъемности и скоростью движения грузонесущего органа. Автоматически действуют аварийные ловители клинового и эксцентрикового типов, удерживающие платформу (кабину) на высоте в случае обрыва или ослабления грузоподъемного каната. Концевые выключатели автоматически отключают привод лебедки в крайних положениях платформы (кабины). Некоторые подъемники можно использовать как стреловые краны с крюком грузоподъемностью до одной тонны.
Лебедки
Лебедки представляют собой грузоподъемные механизмы, предназначенные для подъема, опускания или перемещения грузов с помощью каната, навиваемого на барабан. Они широко применяются для строительно-монтажных и погрузочно-разгрузочных работ, как самостоятельные устройства или элементы грузоподъемных машин. Лебедки разделяются: · по конструкции на: одно - и многобарабанные; · по способу установки - на настенные, подвесные и наземные; · по назначению - на подъемные и монтажные; · тяговые - для перемещения груза по горизонтали; · скреперные - для управления перемещением ковшей и заслонок; · по приводу лебедки могут быть ручные и механические с электрическим и гидравлическим приводом.
Лебедка с электрическим приводом приводится в действие реверсивным электродвигателем, крутящий момент от электродвигателя к барабану, поднимающему груз передается через упругую муфту и редуктор. Лебедки с элеткроприводом имеют тяговое усилие 100 -12500кг.
На рисунке 36 представлена реверсивная электрическая лебедка: 1 - барабан для намотки каната; 2 - редуктор; 3 - тормоз; 4 - муфта соединительная; 5 - электродвигатель реверсивный. Грузоподъемность лебедки определяется из выражения:
где N - мощность двигателя, кВт; i - передаточное отношение редуктора;
n- частота вращения двигателя, об/мин. Мощность, необходимая для подъема груза лебедками с механическим приводом со скоростью v определяется из выражения:
Канатоемкость барабана зависит от его размеров и определяется зависимостью:
где m - число слоев каната на барабане; Dб- диаметр барабана, м; dк, - диаметр каната, м. Тали При монтаже и ремонте санитарно-технических устройств и трубопроводов в местах, недоступных для кранов, применяют грузоподъемные подвесные устройства - ручные и электрические тали. Ручные тали бывают с червячными или шестеренчатыми механизмами. Тали выпускаются грузоподъемностью 1 - 10т, скорость подъема груза 0,3 - 0,6м/мин. Величина тягового усилия Р, которое необходимо приложить к цепи для подъема груза определяется по формуле:
где q- масса поднимаемого груза, кН; d -диаметр приводной звездочки, м; n -число заходов червяка; z -число зубьев червячного колеса; R - радиус тяговой звездочки;
Электрическая таль (тельфер) представляет собой компактный грузоподъемный механизм, смонтированный совместно с ходовой тележкой, перемещающейся по монорельсу. Основными узлами тельфера являются электродвигатель, барабан, четырехступенчатый редуктор, электромагнит с пружиной дискового тормоза обеспечивает подъем крюковой обоймы. Подъем и опускание груза осуществляются канатом на режиме двигателя. Выключение двигателя и вала при подъеме груза на максимальную высоту осуществляется автоматически ограничителем подъема. Грузоподъемность тельферов колеблется от 2,5 до 100кН. Продольное перемещение каретки тали производится по монорельсу вручную, иногда с помощью механического привода от собственного электродвигателя. Таль имеет колодку с кнопочным управлением.
На рисунке 37 представлена электрическая таль (тельфер): 1 -каретка; 2 - монорельс; 3 - вал приводной; 4 - тормоз дисковый электромагнитный; 5 - 4-х ступенчатый редуктор; 6 -обойма крюковая; 7 - канат; 8 - барабан; 9 – электродвигатель. Планы семинарских (практических) занятий
Практические занятия Практические занятия имеют важное значение в подготовке студента к профессиональной деятельности. Они составляют значительную часть всего объёма аудиторных занятий и имеют важнейшее значение для усвоения программного материала. Выполняемые на них задания можно подразделить на несколько групп. Одни из них служат иллюстрацией теоретического материала и носят воспроизводящий характер. Они выявляют качество понимания студентами теории. Другие представляют собой образцы задач и примеров, разобранных в аудитории. Для самостоятельного выполнения требуется, чтобы студент овладел показанными методами решения. Следующий вид заданий может содержать элементы творчества. Одни из них требуют от студента преобразований, реконструкций, обобщений. Для их выполнения необходимо привлекать ранее приобретенный опыт, устанавливать внутрипредметные и межпредметные связи. Решение других требует дополнительных знаний, которые студент должен приобрести самостоятельно. Третьи предполагают наличие у студента некоторых исследовательских умений. По дисциплине «Взаимодействие видов транспорта» практикуется выдача домашних заданий на срок 2-4 недели с последующим представлением их преподавателю для проверки. Каждый студент должен так спланировать свою домашнюю работу, чтобы уложиться в указанный срок. При этом никогда не следует затягивать выполнение этих заданий до последней недели, нужно находить время для постепенного их выполнения в течение всего отведенного на эту работу срока. Записи на практических занятиях нужно выполнять очень аккуратно, в отдельной тетради. Попытка сэкономить время за счет неаккуратных сокращений приводит, как правило, к обратному - значительно большей потере времени и повторению сделанного ранее решения и всех расчетов, с ним связанных. Семинарские и практические занятия по всем дисциплинам не только углубляют и закрепляют соответствующие знания, но и развивают инициативу, творческую активность, вооружают будущего специалиста методами и средствами научного познания. В процессе подготовки к практическим занятиям (семинарским) студенты должны ознакомиться с планом проведения очередного занятия, изучить соответствующий лекционный материал, а также материалы по теме занятия, изложенные в основной и дополнительной литературе. К практическим занятиям (семинарским) студенты готовят рефераты и выступают с докладами, самостоятельно выбирая тему из рекомендованных преподавателем: 
Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|
 , (48)
, (48) - коэффициент использования объема желоба.
- коэффициент использования объема желоба. , (49)
, (49) , (50)
, (50) - коэффициент заполнения желоба материалом по сечению, kн = 0,1 - 0,4;
- коэффициент заполнения желоба материалом по сечению, kн = 0,1 - 0,4;
 , (51)
, (51)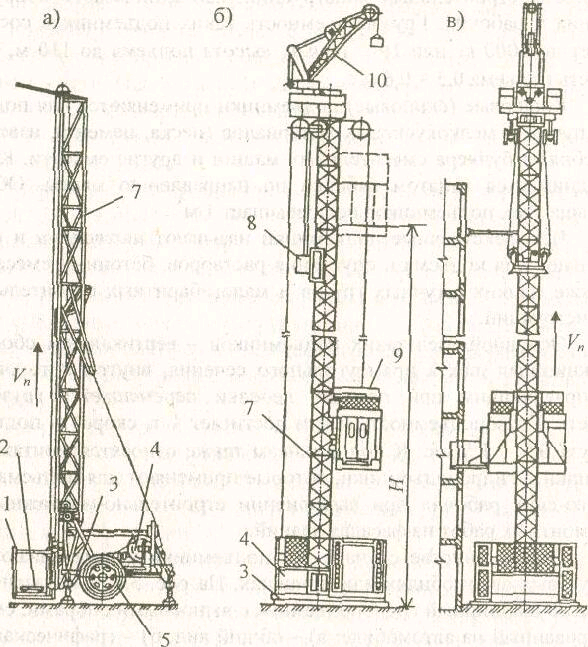 мачтовые;
мачтовые;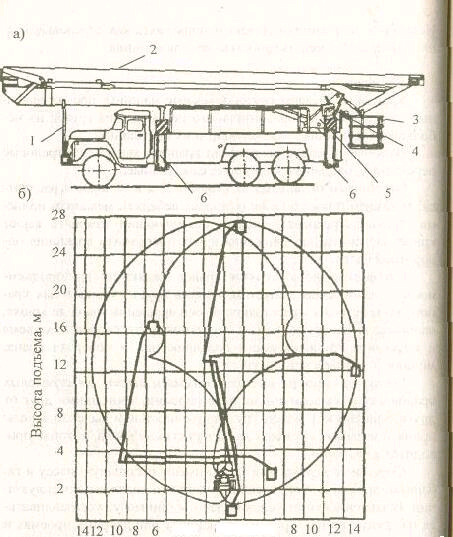 Монтажные вышки. К подъемникам также относятся монтажные вышки и гидроподъемники, которые применяют для подъема одного или двух рабочих при выполнении строительно-монтажных и ремонтных работ на фасадах зданий.
Монтажные вышки. К подъемникам также относятся монтажные вышки и гидроподъемники, которые применяют для подъема одного или двух рабочих при выполнении строительно-монтажных и ремонтных работ на фасадах зданий. , (52)
, (52) - КПД лебедки;
- КПД лебедки; -.радиус барабана, мм;
-.радиус барабана, мм; , (53)
, (53) , (54)
, (54)
 - длина рабочей части барабана, м;
- длина рабочей части барабана, м; , (55)
, (55) - КПД тали;
- КПД тали;  = 0,65-0,7.
= 0,65-0,7.