
|
|
Динамический синтез кулачкового механизма
Постановка задачи динамического синтеза кулачкового механизма
Задачами проектирования кулачкового механизма являются: 1. Определения основных размеров из условия ограничения угла давления; 2. Построение профиля кулачка, обеспечивающего заданный закон движения толкателя.
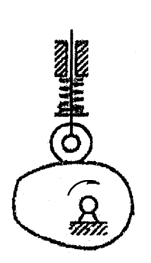
Рисунок 5.1 – Схема кулачкового механизма Выбор исходных данных для проектирования механизма
Исходные данные, необходимые для проектирования кулачкового механизма заносим в таблицу 5.1.
Таблица 5.1 – Исходные данные
Составление схемы алгоритма расчёта кинематических характеристик толкателя
Переведем значения фазовых углов в радианную меру:
Рабочий угол кулачка
Приращение угла поворота кулачка (шаг) на фазе удаления и возвращения:
Текущая обобщенная координата
а на фазе возвращения
На фазе удаления толкатель движется по косинусоидальному закону движения, а на фазе возвращения – по закону движения с постоянным ускорением. Для фазы удаления для расчетов используем следующие формулы:
Аналог скорости движения толкателя определяется по уравнению:
Аналог ускорения определяется по уравнению:
На фазе возвращения перемещение определяется по уравнениям:
Аналог скорости движения толкателя определяется по уравнениям:
Аналог ускорения определяется по уравнениям:
(5.7)
Величину угла φ1 , соответствующая точка сопряжения парабол на графике перемещения толкателя, вычисляется по формуле:
Расчет значений перемещения толкателя, его аналогов скорости и ускорения для 2-х контрольных положений
Для расчета выбираем положение №3 на фазе удаления и положение №24 на фазе возвращения. Для 3-го контрольного положения текущая обобщенная координата:
Для 24-го контрольного положения текущая обобщенная координата:
Для 3-го контрольного положения Перемещение толкателя (формула 5.2):
Аналог скорости движения толкателя (формула 5.3):
Аналог ускорения движения толкателя (формула 5.4):
Для 24-го контрольного положения На фазе возвращения перемещение определяется по уравнениям:
Аналог скорости движения толкателя определяется по уравнениям:
Аналог ускорения определяется по уравнениям:
Расчет значений перемещения, аналога скорости и аналога ускорения толкателя для всех положений приведены в приложении 1.
Определение экстремальных значений аналогов скорости и ускорения толкателя на фазах удаления и возвращения, а также соответствующих им перемещений
Максимальное перемещение, как на фазе удаления, так и на фазе возвращения равно ходу толкателя h = 0,014м. Рассчитываем max значения аналогов скоростей толкателя:
Рассчитываем max значения аналогов ускорений толкателя:
Построение совмещенной диаграммы и определение основных размеров механизма из условия максимально допустимого угла давления
Минимальный радиус-вектор r0 центрового профиля кулачка и эксцентриситет е толкателя определяем из условия, что угол давления θ в проектируемом механизме во всех положениях не должен превышать θдоп. Решение указанной задачи выполняем графическим методом. Для этого на основании графиков ro=OA1∙μs=85∙0,0002=0,017 м; е=ОВ∙μs=42,5∙0,002=0,0085 м. Построение кинематической диаграммы движения толкателя 
Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|








 .
. на фазе удаления в i-том положении равна
на фазе удаления в i-том положении равна , (5.1)
, (5.1) (5.1 а)
(5.1 а)
 (5.2)
(5.2)
 (5.3)
(5.3)

 (5.5)
(5.5) (5.6)
(5.6)











 .
. .
. и
и  строим совмещённую диаграмму
строим совмещённую диаграмму  . Ординаты
. Ординаты  на фазе удаления откладываем повёрнутыми на 90о в направлении вращения кулачка, а на фазе возвращения – противоположно им. К построенным кривым слева и справа проводим касательные под углом θдоп=30о к оси
на фазе удаления откладываем повёрнутыми на 90о в направлении вращения кулачка, а на фазе возвращения – противоположно им. К построенным кривым слева и справа проводим касательные под углом θдоп=30о к оси  . Ниже точки пересечения этих касательных находится зона, в которой можно выбирать центр вращения кулачка из условия θi
. Ниже точки пересечения этих касательных находится зона, в которой можно выбирать центр вращения кулачка из условия θi  θдоп. Наименьшие габариты механизма получаются, если центр вращения выбрать в точке пересечения касательных. Из чертежа находим
θдоп. Наименьшие габариты механизма получаются, если центр вращения выбрать в точке пересечения касательных. Из чертежа находим