|
|
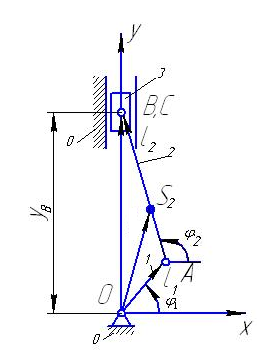
Графический метод решения3.4.1.1 Построение плана положений механизма Рассчитав значения lOA, lAB, lAS2 можно приступить к построению плана положений механизма. Так как данный механизм имеет вертикальное расположение, то геометрическое место точек всех положений ползуна находится на вертикальной прямой, проходящей через ось вращения кривошипа. Для построения плана положений механизма необходимо задать масштабный коэффициент, с помощью которого реальные размеры звеньев механизма выражаются в отрезках, изображаемых на чертеже. Принимаем Определим значения величин AB и AS2:
На листе формата А1 выбираем точку O и наносим систему координат XOY. Из точки O проводим окружность радиуса OА и разбиваем ее на 12 равных частей. Полученные на окружности точки нумеруем от «1» до «13» (начинаем с верхней, и далее по ходу вращения кривошипа) и соединяем их с центром О. Данные отрезки будут являться положениями кривошипа. Из точек на окружности проводим отрезки длиной АВ до пересечения их с осью OY и полученные на оси ординат точки нумеруем в соответствии с нумерацией точек на окружности. Данные точки будут являться планом положений ползуна, а отрезки - шатуна. На плане положений шатуна от точек Ai откладываем отрезки длиной AS2, и полученные точки нумеруем соответственно.
3.4.1.2 Построение плана аналогов скоростей и определение первых передаточных функций механизма
Используя соотношение
Для построения плана аналогов скоростей выбираем контрольное положение, при котором Примем масштабный коэффициент плана аналогов скоростей Строим на чертеже точку р - полюс плана аналогов скоростей. Проводим из точки р отрезок рa перпендикулярный OА и направленный в сторону вращения кривошипа (аналог скорости совпадает по направлению с вектором скорости). Аналог скорости точки A – отрезок рa =OА=50мм. Для точки B записываем систему векторных уравнений:
где Так как Из точки a строим прямую линию перпендикулярную шатуну AВ плана положений механизма. Из точки p строим прямую линию параллельную оси ОY плана положений механизма. На пересечении этих линий получаем точку b. Точку s2 на плане строим исходя из теоремы подобия:
где ab – отрезок на плане аналогов скоростей. Определив расположение точки s2 на плане аналогов скоростей, определяем величины ps2, xs2 и ys2. Определим первые передаточные функции графическим способом: для 3-го положения
для 9-го положения
Сведем значение величин, полученных графическим методом в таблицу 3.2 . Таблица 3.2 – Результаты построений и вычислений
Аналитический метод решения Составление схемы алгоритма расчета кинематических Характеристик механизма
Рисунок 3.4. Расчетная схема механизма Алгоритм вычислений кинематических характеристик механизма имеет вид (Методическое пособие «Динамика машин и механизмов в установившемся режиме движения»): 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. 13. 14. 15. 16. 17. Примечание: 1. В формуле (3) a=+1, если ползун расположен сверху от начала координат, a=–1, если ползун расположен снизу. Расчет кинематических характеристик рычажного механизма
Алгоритм вычислений полученный в пункте 3.4.2.1. используем для контрольного положения механизма с углом с углом φ1=30º в таблице 3.3. с результатами. Таблица 3.3. Результаты расчета
Продолжение таблицы 3.3.
Алгоритм вычислений полученный в пункте 3.4.2.1. используем для контрольного положения механизма с углом с углом φ1=210º в таблице 3.4. с результатами. Таблица 3.4. Результаты расчета
Продолжение таблицы 3.4.
Сравним результаты расчетов, полученные графическим и аналитическим методами для 3-го положения, в таблице 3.5, а для 9-го в таблице 3.6.
Таблица 3.5. Сравнение полученных результатов.
Таблица 3.6. Сравнение полученных результатов. 
Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|







 - начальная обобщенная координата, соответствующая положению механизма в верхней мертвой точке.
- начальная обобщенная координата, соответствующая положению механизма в верхней мертвой точке. э строим план аналогов скоростей.
э строим план аналогов скоростей.

 - аналог скорости.
- аналог скорости. = 30°.
= 30°.
 , (3.2)
, (3.2)


 то точка b0 совпадает с полюсом плана аналогов скоростей p.
то точка b0 совпадает с полюсом плана аналогов скоростей p.
 , для 3-го положения
, для 3-го положения