
|
|
Расчет переменной составляющей приведенного момента инерцииПеременная составляющая IIIП определяется из условия равенства кинетических энергий, т.е. кинетическая энергия звена приведения, имеющая момент инерции IIIП, равна сумме кинетических энергий звеньев, характеризуемых переменными функциями:
Разделив это выражение на ω12 и, учитывая, что
Для звеньев 2 и 3 данного механизма получим:
где
Все положения
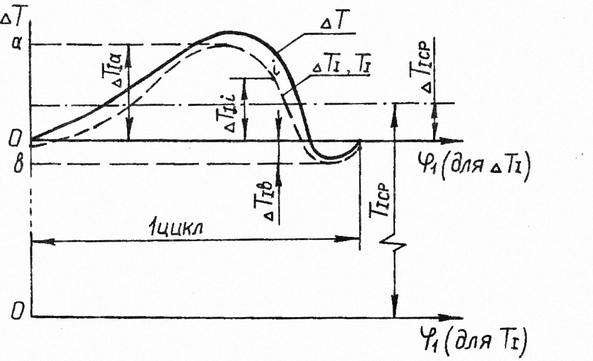
Определяем производную
где α – угол наклона касательной к графику
Для положения №3 α = 131°, тогда
Для положения №9 α = 131°, тогда
Результаты расчета переменной составляющей приведенного момента инерции приведены в таблице 3.10.
Таблица 3.10 – Расчет переменной составляющей приведенного момента инерции
Построение графика переменной составляющей приведенного момента инерции
На графике изображаются три составляющие и четвертая - их суммарная величина. Масштабный коэффициент Таблица 3.11 – Данные для построения графика переменной составляющей приведенного момента инерции
Расчёт известной части постоянной составляющей приведенного Момента инерции В постоянную составляющую приведенного момента инерции входят моменты инерции кривошипа и всех вращающихся звеньев:
где
Составление схемы алгоритма по определению постоянной Составляющей приведенного момента инерции по методу Н.И. Мерцалова В основу расчёта положен метод Н.И. Мерцалова. Для определения изменения кинетической энергии машины
Все положения
Таблица 3.12 - Значения кинетической энергии машины
Изменение кинетической энергии
где
Все положения
Таблица 3.13 - Значения кинетической энергии звеньев
Находим значение изменяющейся кинетической энергии от звеньев с Все положения
Таблица 3.14 - Значения изменяющейся кинетической энергии
Далее из полученного за цикл массива значений
Рисунок 3.8 График изменения кинетической энергии
Тогда необходимая величина
где
Определение момента инерции маховика И его параметров
Момент инерции маховика определяется как:
где Иногда величина
Выбор параметров маховика: материал маховика - сталь( форма маховика - диск. Так как маховик имеет цилиндрическую форму, то его момент инерции рассчитывается по формуле:
Принимаем диаметр маховика равным DМ = 0,85 м. Проверим окружную скорость данного маховика. Она должна быть меньше допускаемой: Окружная скорость рассчитывается по формуле:
Условие выполняется, следовательно, диаметр маховика D=0,85 м нас удовлетворяет. Из формулы
Выразим ширину маховика:
где V - объем маховика.
3.16 Составление схемы алгоритма по определению закона движения звена приведения ω1(t)
Кинетическая энергия звеньев равна
где Все положения
Таблица 3.15 - Значения кинетической энергии звеньев
Так как

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|

 получим:
получим:













 для всех положений механизма, которая может быть получена методом графического дифференцирования:
для всех положений механизма, которая может быть получена методом графического дифференцирования:
 (φ1) в соответствующей точке.
(φ1) в соответствующей точке.


 .
. ,
,


 .
. предварительно определяем работу сил сопротивления
предварительно определяем работу сил сопротивления  .
. .
.

 звеньев с постоянным приведенным моментом инерции
звеньев с постоянным приведенным моментом инерции  равно
равно ,
, - кинетическая энергия звеньев, создающих переменную составляющую
- кинетическая энергия звеньев, создающих переменную составляющую  . По методу Н.И. Мерцалова
. По методу Н.И. Мерцалова  :
: .
.

 =const:
=const:


 (рис. 3.8) находим максимальную
(рис. 3.8) находим максимальную  и при минимальном
и при минимальном  величины, используя которые вычисляем максимальный перепад кинетической энергии:
величины, используя которые вычисляем максимальный перепад кинетической энергии: ,
, .
.
 , при которой имеет место вращение звена приведения с заданным коэффициентом неравномерности
, при которой имеет место вращение звена приведения с заданным коэффициентом неравномерности  , равна:
, равна: , (3.4)
, (3.4)

 ,
, - момент инерции всех вращающихся звеньев машины.
- момент инерции всех вращающихся звеньев машины. может оказаться больше полученного значения
может оказаться больше полученного значения 
 = 7850
= 7850  );
);
 [v], [v] для стали 80 - 100 м/с;
[v], [v] для стали 80 - 100 м/с; ;
;


 ,
, ;
;
 ,
, ,
,  .
.


 , то текущее значение угловой скорости
, то текущее значение угловой скорости .
.











