
|
|
Тематический словарь терминовАбсолютно твердое тело– тело (система), взаимное положение любых точек которого не изменяется, в каких бы процессах оно ни участвовало Абсолютно упругое тело – частный случай деформируемого тела, в нем отсутствует остаточная деформация. Аксиома – положение, принимаемое без логического доказательства в силу непосредственной убедительности. Амплитуда колебаний – наибольшее смещение упругой системы от положения статического равновесия. Амплитуда цикла напряжений – алгебраическая полуразность максимального и минимального напряжения цикла Атмосфера – внесистемная единица измерения давления, 1 атм. = 101 325 Па = = 760 мм рт. ст. База испытаний– предварительно задаваемое наибольшее число циклов при испытании на усталость. Балка – брус, работающий на изгиб. Брус (стержень) – конструктивный элемент, поперечные размеры которого малы по сравнению с длиной. Внешние связи – ограничения, накладываемые на абсолютное перемещение некоторых точек системы. Внутренние связи – ограничения, накладываемые на взаимные смещения элементов системы. Внутренние силы – силы взаимодействия между точками системы. Возмущающая сила– сила, действующая на упругое основание со стороны возбудителя, вызывающая вынужденные колебания системы. Временное сопротивление (предел прочности) – максимальное напряжение (определенное без учета изменения площади поперечного сечения в процессе нагрузки), выдерживаемое материалом до разрушения при растяжении. Гипотеза плоских сечений (гипотеза Бернулли)– гипотеза, в соответствии с которой поперечные сечения стержня, плоские и нормальные к его оси до деформации, остаются плоскими и нормальными к оси и после деформации. Графостатика – учение о графических методах решения задач статики. Давление – отношение силы, нормальной к поверхности взаимодействия между телами, к площади этой поверхности. Деформация – изменение положения точек твердого тела, при котором меняется расстояние между ними, в результате внешних воздействий. Деформация называется упругой, если она исчезает после окончания действия приложенных сил, и пластичной, если она полностью не исчезает. К наиболее простым видам деформации тела относятся: растяжение, сжатие, сдвиг, изгиб, кручение. Диаграмма предельных амплитуд – зависимость предела выносливости материала от степени асимметрии цикла, выраженная графически. Динамика – раздел механики, в котором изучаются причины возникновения механического движения. Динамика оперирует такими понятиями, как масса, сила, импульс, энергия. Закон всемирного тяготения – закон, в соответствии с которым два тела притягиваются с силой, прямо пропорциональной произведению их масс и обратно пропорциональной квадрату расстояния между ними. Закон Гука – закон, по которому деформация точек упругого тела пропорциональна силам вызывающим эти деформации. Закон парности касательных напряжений – закон, в соответствии с которымсоставляющие касательных напряжений на двух взаимно перпендикулярных площадках, перпендикулярные общему ребру, равны по величине и противоположны по знаку, то есть либо обе направлены к ребру либо обе направлены от ребра. Закон сохранения механической энергии – закон, в соответствии с которым при движении точки под действием потенциальных сил сумма кинетической и потенциальной энергии точки, т.е. ее механическая энергия, остается величиной постоянной. Зона упрочнения – участок кривой деформирования образца, на котором материал вновь приобретает свойство оказывать сопротивление нагрузке, однако с ростом удлинения образца нагрузка возрастает значительно медленнее, чем на упругом участке. Изгиб косой – вид изгиба, при котором плоскость действия изгибающего момента не содержит ни одной из главных центральных осей инерции поперечного сечения балки. Изгиб плоский– вид изгиба, при котором ось балки после деформации остается плоской линией. Изгиб поперечный – такой вид нагружения, при котором в поперечном сечении бруса действуют изгибающий момент и поперечная сила. Изгиб чистый – такой вид нагружения, при котором в поперечном сечении бруса действует только один изгибающий момент. Изогнутая линия бруса – геометрическое место центров тяжести поперечного деформированного бруса Инертность – способность тела сохранять свое движение при отсутствии сил и изменять его под действием сил не сразу, а постепенно, тем медленнее, чем больше вещества содержится в теле. Инерциальная система отсчета– система, собственное движение которой не может быть обнаружено никаким механическим опытом. Кинематика – раздел механики, изучающий движение тел без учета действующих на них сил. Кинематические величины – величины, зависящие от расстояния, проходимого телом в пространстве, и от времени. Кинетическая энергия точки – скалярная величина, равная половине произведения массы точки на квадрат ее скорости. Кинетическая энергия системы материальных точек – скалярная величина, равная сумме кинетических энергий всех точек системы. Кинетические величины – величины, зависящие от силы или массы. Коэффициент запаса прочности – коэффициент, показывающий во сколько раз необходимо снизить уровень напряжений в конструкции, считая от предела текучести или предела временного сопротивления, чтобы при ее эксплуатации не допустить разрушения изделия; призван компенсировать недостатки расчетных методик, рассеяния свойств материала, неучтенные факторы условий эксплуатации и т.п. Круговая частота – число колебаний в 2π секунд. Малоцикловая усталость – усталость материала, при которой усталостное повреждение или разрушение происходит при упруго-пластическом деформировании. Условно принимают, что при N < 50000 циклов имеет место малоцикловая усталость. Масса – физическая величина, отвечающая способности физических тел сохранять свое поступательное движение (инертности), а также характеризующая количество вещества. Под массой понимают два различных свойства вещества: - инертная масса – масса, которая характеризует меру инертности тел и фигурирует во втором законе Ньютона; - гравитационная масса – масса, которая определяет, с какой силой тело взаимодействует с внешними гравитационными полями (пассивная гравитационная масса) и какое гравитационное поле создает само это тело (активная гравитационная масса). Математический маятник – материальная точка, совершающая под действием силы тяжести колебательные движения (тяжелый груз малых размеров, подвешенный на нити). Механическая система– множество материальных точек, в которой движение каждой точки и ее положение зависят от движения и положения остальных точек системы. Минимальное напряжение цикла – наименьшее по алгебраическому значению напряжение цикла. Многопролетные балки – балки, проходящие не прерываясь над рядом промежуточных опор, с которыми они соединены шарнирно. Многоцикловая усталость– усталость материала, при которой усталостное повреждение или разрушение происходит в основном при упругом деформировании. Условно принимают, что при N > 50000 циклов имеет место многоцикловая усталость. Модуль продольной упругости (модуль упругости первого рода, модуль Юнга) – величина, характеризующая упругие свойства материала. В случае малых деформаций, когда справедлив закон Гука, т.е. имеет место линейная зависимость между напряжениями и деформациями, модуль упругости представляет собой коэффициент пропорциональности между этими соотношениями. Модуль Сдвига(модуль упругости второго рода) – величина, характеризующая упругие свойства материала при чистом сдвиге. В случае малых деформаций, когда справедлив закон Гука, т.е. имеет место линейная зависимость между касательными напряжениями и сдвиговыми деформациями, модуль упругости представляет собой коэффициент пропорциональности между этими соотношениями. Наклеп материала – повышение прочности и уменьшение пластичности материала вследствие предварительной нагрузки выше предела текучести. Напряжение – мера интенсивности внутренних сил, распределенных по сечениям, то есть усилия, приходящиеся на единицу площади поперечного сечения. Неизменяемая система – система материальных точек, в которой расстояние между двумя любыми точками неизменно со временем. Несвободное твердое тело– тело, перемещение которого ограничено связями. Период колебаний – наименьший промежуток времени, за который точка приходит в то же положение и имеет ту же скорость. Переносное ускорение – ускорение того места в подвижной системе отсчета, в которой точка находится в рассматриваемый момент времени. Плоскость действия пары – плоскость, в которой действуют пары сил. Поверхностные силы – силы, действующие на точки поверхности тела. Подъемная сила – составляющая полной силы давления жидкой или газообразной среды на движущееся в ней тело, направленная перпендикулярно к скорости движения тела. Поле сил– область пространства, в каждой точке которого на помещенную туда материальную частицу действует определенная сила, являющаяся однозначной, конечной и дифференцируемой функцией координат этой точки. Поле сил нестационарное – область пространства, в которой сила зависит явно от времени. Поле сил стационарное – область пространства, в которой сила не зависит явно от времени. Ползучесть – явление изменения во времени напряжений и деформаций в нагруженной детали. Потенциальная сила – сила, являющаяся градиентом силовой функции в потенциальном силовом поле. Прогиб балки– поступательные перемещения сечений, равные перемещениям их центров тяжести. Предел выносливости – наибольшее по абсолютному значению напряжение цикла, при котором не происходит усталостного разрушения за бесконечно большое число циклов. Растяжение – такой вид деформации, при котором в поперечном сечении бруса возникает только продольная сила. Реакции связей– силы, которыми можно заменить действие связей. Силовое поле– область пространства, в каждой точке которой на помещенную туда материальную частицу действуют определенная сила, являющаяся однозначной, ограниченной и дифференцируемой функцией координат этой точки. Скоростной коэффициент – отношение модуля векторной скорости в произвольной точке к критической скорости звука. Сосредоточенная сила – сила, приложенная к точке поверхности. Статика– раздел механики, в котором изучаются условия равновесия механических систем под действием приложенных к ним сил и моментов. Статически неопределимые системы– число искомых неизвестных усилий больше числа независимых уравнений равновесия, которые для данной расчетной системы можно составить. Теорема Кенига – теорема, по которой кинетическая энергия системы равна сумме кинетических энергий центра масс системы движущегося поступательно и во вращательном движении системы относительно центра масс. Теорема Вариньона– теорема, в соответствии с которой момент равнодействующей произвольной системы сил относительно любой точки (оси) равен сумме моментов всех составляющих сил относительно той же точки (оси). Теоретическая механика– наука об общих законах механического движения и взаимодействия материальных тел. Упругая линия – кривая, лежащая в силовой плоскости. Упругость – способность материала восстанавливать первоначальные размеры и форму детали после снятия внешних нагрузок. Усталость– процесс постепенного накопления повреждений в материале под действием переменных напряжений и деформаций, приводящий к изменению свойств, образованию трещин и разрушению Центр тяжести – точка, являющаяся центром параллельных сил тяжести частиц тела. Число степеней свободы тела – число независимых перемещений, которые может совершить тело. Формула Эйлера – выражение, по которому можно вычислить критическую продольную силу при выпучивании стержня в одной из двух главных его плоскостей. 2.3. Методические указания по изучению дисциплины Дисциплина «Механика» изучается курсантами УВАУ ГА(и) на завершающем этапе общетехнической подготовки; опирается на знания, полученные ими по дисциплинам естественно-научного цикла («Математика», «Физика», «Химия» и др.), а также по дисциплинам общетехнической предметной подготовки («Начертательная геометрия», «Инженерная графика», «Материаловедение», «Технология конструкционных материалов», «Метрология, стандартизация и сертификация» и др.) Цель изучения дисциплины – формирование у обучаемых основ инженерно-технического мышления и общетехнической культуры. Знание данной дисциплины позволит квалифицированно эксплуатировать механическое оборудование гражданской авиации. Основными задачами изучения дисциплины являются: - изучение основных типов конструкций (деталей, узлов, механических передач, соединений деталей); - усвоение базовых принципов конструирования; - овладение навыками расчетов конструкций и их элементов. Курсант, изучивший дисциплину, должен знать: - основные законы равновесия и их приложение в технике; - типы и законы движения простейших механических систем с кинематическими характеристиками под действием изменяющихся по времени и направлению систем сил; - методы расчета на прочность и жесткость конструкций и узлов. уметь: - определять кинематические параметры, характеризующие движение системы; - использовать основные теоремы (законы) механики при изучении специальных дисциплин; - выполнять расчет на прочность и жесткость простейших элементов механических конструкций; владеть навыками использования полученных знаний и умений в будущей профессиональной деятельности. Курс «Механика» состоит из четырех разделов: «Теоретическая механика», «Сопротивление материалов», «Теория механизмов» и «Детали машин и основы конструирования». Обучение курсантов осуществляется путем изложения на лекционных занятиях теоретических основ дисциплины, закрепления теоретических знаний на лабораторно-практических занятиях и в процессе самостоятельной работы курсантов при изучении рекомендуемой литературы и приобретения практических навыков решения задач на практических занятиях под руководством преподавателя, в процессе самостоятельного выполнения расчетно-графических работ. Выполненные самостоятельно лабораторно-практические работы защищаются курсантами в форме ответов на вопросы преподавателя. Предусматривается написание контрольных работ (по материалам к контрольным работам) и тестирование по каждой теме дисциплины по тестам для контроля текущей успеваемости курсантов. Итоговый контроль осуществляется в форме устного экзамена по разработанным билетам либо в виде зачета. К экзамену допускаются курсанты, прослушавшие курс лекций по дисциплине, выполнившие и защитившие все лабораторно-практические работы, написавшие на положительные оценки контрольные работы, успешно прошедшие текущее тестирование по дисциплине. В качестве поощрения допускается освобождение от сдачи экзамена курсантов, успешно (досрочно и в срок) сдавших и защитивших все лабораторно-практические работы и получивших положительные оценки по результатам текущей успеваемости. Оценка за экзамен в этом случае определяется по результатам текущей успеваемости, учитывающей результаты сдачи лабораторно-практических работ, оценки по контрольным работам и оценки промежуточного тестирования при изучении дисциплины. Зачет проводится по прикладной части «Механики» в третьем и четвертом семестрах. К зачету допускаются курсанты, выполнившие предусмотренные учебной программой лабораторно-практические работы и защитившие их. Зачет проводится в форме контрольной работы, предусматривающей решение задач и тестирование. Содержание каждого из разделов подробно изложено в учебной программе по дисциплине. При изучении теоретической части курса недостаточно ограничиваться только конспектом. Обязательным условием успешного усвоения материала является изучение соответствующих тем по рекомендуемой литературе. Необходимо к каждой лекции или лабораторно-практическому занятию курсантам изучить и повторить материал предыдущего занятия или лекции. Только при этом условии может быть достигнута непрерывность и последовательность изучения предмета, обеспечивающих наиболее полное и твердое усвоение основных принципов и методов расчета. Лабораторно-практические работы по «Механике» составлены в соответствии с теоретическим курсом и являются его неотъемлемым дополнением. Целью этих работ является закрепление и углубление теоретических знаний, полученных на лекциях, и развитие навыков самостоятельного применения этих знаний при расчетах. В методических указаниях к каждой работе даются основные теоретические сведения, необходимые для понимания изучаемых вопросов, описание оборудования, цель и задачи работы, порядок ее выполнения. Приводятся требования к оформлению отчета, а также контрольные вопросы, ответы на которые способствуют более глубокому освоению и закреплению изучаемого материала. Предварительная подготовка курсанта к выполнению лабораторно-практической работы заключается в глубоком изучении теоретического материала по конспекту или учебнику и по данному учебному пособию. По каждой работе оформляется индивидуальный отчет. Все графические построения выполняются карандашом с помощью чертежных инструментов. По каждой выполненной работе курсант должен отчитаться на лабораторно-практическом занятии или на консультации. При изучении дисциплины «Механика» большое место занимают проблемы специализации, решаемые установлением тесных связей с профилирующими кафедрами. Одним из путей специализации является включение в индивидуальные домашние задания задач, непосредственно связанных со специальностью. Это способствует установлению надежных межпредметных связей. Такое взаимопроникновение учебных дисциплин нацеливает будущих специалистов на комплексное применение знаний, умений и навыков. УЧЕБНОЕ ПОСОБИЕ Теоретическая механика Статика Тема 1. Основные понятия и аксиомы статики Материальная точка– тело, размерами которого можно пренебречь. Она обладает массой и способностью взаимодействовать с другими материальными точками. Например, в небесной механике планеты, движущиеся вокруг Солнца, часто рассматривают как материальные точки, поскольку их размеры малы по сравнению с размерами орбит. Пользоваться понятием материальной точки целесообразно также и в том случае, когда все частицы движущегося физического тела перемещаются одинаково. Совокупность материальных точек, положения и движения которых взаимосвязаны между собой, называется системой материальных точек. В теоретической механике пренебрегают малыми деформациями тел и считают эти тела абсолютно твердыми. Силой называется количественная мера механического взаимодействия тел. Сила является векторной величиной, действие силы на тело определяется численным значением (модулем), направлением и точкой приложения силы (рис. 3.1.1).
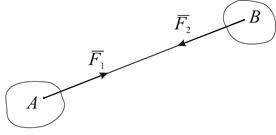
Рис. 3.1.1 На схемах сила изображается направленным отрезком. Основной единицей измерения силы является 1 Ньютон (1 Н). Совокупность нескольких сил, действующих на тело, называется системой сил. Эквивалентная система сил – система сил, оказывающих одинаковое механическое действие на одно и то же тело. Уравновешенная система сил– система сил, под действием которых тело находится в равновесии. Сила, эквивалентная некоторой системе сил, называется равнодействующей. Сила, равная по модулю равнодействующей и направленная по линии ее действия в противоположную сторону, называется уравновешивающей силой. Внешними силами называются силы, действующие на тело со стороны других тел. Внутренние силы– силы взаимодействия между частицами одного и того же тела. В статике рассматриваются условия равновесия внешних сил. Аксиомы статики. В основе статики лежат несколько не требующих доказательства аксиом, из которых выводятся все теоремы и уравнения. Аксиома 1.Две силы, действующие на абсолютно твердое тело, уравновешиваются только тогда, когда они равны по величине и направлены по одной прямой в противоположные стороны (рис. 3.1.2).
Рис. 3.1.2 Аксиома 2. Действие данной системы сил на абсолютно твердое тело не изменится, если прибавить к ней или отнять от нее уравновешенную систему сил (
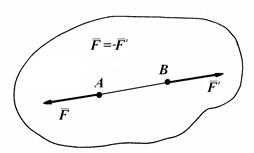
Рис. 3.1.3 Следствие из аксиомы 1 и 2. Действие силы на абсолютно твердое тело (АТТ) не изменится, если точку приложения этой силы перенести по линии ее действия. Пусть на тело в точке А действует сила
Рис. 3.1.4 Аксиома 3.Равнодействующая двух сил, приложенных к АТТ в одной точке, равна их геометрической сумме
Рис. 3.1.5 Аксиома 4.Всякому действию одного тела на другое соответствует равное по величине, но противоположное по направлению противодействие. Действие и противодействие – это силы, приложенные к двум различным телам, поэтому они не уравновешиваются (рис. 3.1.6).
Рис. 3.1.6
Под действием сил тело D находится в равновесии. Если трос CB заменить стержнем, то равновесие не нарушится, равновесие не нарушится и в том случае, если трос BD заменить стержнем, если же стержень АВ заменить тросом – равновесие нарушится (рис. 3.1.7). Связи и их реакции.Твердое тело называется свободным, если оно может перемещаться в пространстве в любом направлении (ВС в полете). Тело, ограничивающее свободу движения данного твердого тела, является по отношению к нему связью. Твердое тело, свобода движения которого ограничена связями, называется несвободным (самолет на ВПП). Сила, с которой связь действует на тело, препятствуя его перемещению в том или ином направлении, называется силой реакцииэтой связи. Для нахождения реакции связей используют аксиому связей, на основании которой всякое несвободное тело можно рассматривать как свободное, если отбросить связи, заменив их действие на тело силами реакций этих связей. Направление силы реакции связи противоположно тому направлению, в котором активные силы стремятся переместить тело. Различают три группы связей: 1. Гибкие связи (трос, цепь, ремень, канат): реакции связей направлены по оси связей (рис. 3.1.8).
Рис. 3.1.8 Если нить отклоняется роликом, в котором не учитывается трение, то натяжение нити не изменяется. Например, натяжение тросов, идущих от штурвала к элеронам ВС, с обеих сторон равны по модулю |Т1| = |Т3|, |Т2 |= |Т4| (рис. 3.1.8, б).
2. Твердые, идеально гладкие связи: реакция направлена по общей нормали к поверхностям соприкасающихся тел (рис. 3.1.9). 3. Шарнирные связи. Шарниром в механике называется устройство, допускающее поворот одного тела относительно другого, но ограничивающее при этом линейные перемещения этих тел. Шарнирами, например, являются соединения А, В, С элементов задней опоры самолета (рис. 3.1.10), узлы А, В, С, D подвески авиационного двигателя (рис. 3.1.11).
Рис. 3.1.12 Шаровой шарнир исключает любое перемещение тела во всех направлениях, кроме вращения, поэтому реакция шарового шарнира может иметь любое направление в пространстве. Чаще всего эту реакцию представляют в виде трех ее составляющих по осям координат x, y, z (рис. 3.1.13).
Разнообразные опорные устройства валов машин схематически представляют подшипниками двух типов: радиальным (цилиндрическим – А), не препятствующим некоторым осевым смещениям вала, и радиально-упорным (В), исключающим осевые перемещения вала (рис. 3.1.14).
Тема 2. Система сходящихся сил Сложение сходящихся сил. Система сил, линии действия которых пересекаются в одной точке, называется системой сходящихся сил. Сложить две или несколько сил – значит заменить эти силы одной силой, им эквивалентной, т.е. найти их равнодействующую (рис. 3.1.16). Из ∆ADC:
Найти равнодействующую можно также, построив половину параллелограмма – треугольник сил, в котором равнодействующая является замыкающей стороной (рис. 3.1.17).
Так как Равнодействующая нескольких сходящихся сил выражается по модулю и направлению вектором, соединяющим начальную и конечную точки ломаной линии (правило силового многоугольника) (рис. 3.1.19).
Сходящиеся силы уравновешиваются в случае, если их равнодействующая равна нулю, т.е. многоугольник сил замкнут. Конец вектора последней силы совпадает с началом вектора первой силы, все силы направлены по контуру многоугольника в одну сторону, т.е. Согласно, аналитическому условию равновесия при R = 0 получим
где ∑ Fix, ∑ Fiy, ∑ Fiz – проекции сил на координатные оси. Следовательно, ∑ Fix = 0; ∑ Fiy = 0; ∑ Fiz = 0. (3.1.5) Для равновесия тела при действии на него пространственной системы сходящихся сил необходимо и достаточно, чтобы сумма проекций этих сил на каждую из координатных осей была равна нулю. Теорема о равновесии трех непараллельных сил.Линии действия трех непараллельных взаимно уравновешивающихся сил, лежащих в одной плоскости, пересекаются в одной точке. К твердому телу в точках А1, А2, А3 приложены три непараллельные взаимно уравновешивающиеся силы
Сходящиеся силы, приложенные к ВС. Часто для качественной оценки сил, действующих на ВС, их представляют в виде сходящихся сил. Равнодействующую  сил давления воздушного потока на крыло и сил трения протекающего воздуха о его поверхность можно считать суммой двух сходящихся сил (рис. 3.1.21): сил давления воздушного потока на крыло и сил трения протекающего воздуха о его поверхность можно считать суммой двух сходящихся сил (рис. 3.1.21):
где
В виде сходящихся сил представляют часто и силы, действующие на ВС в полете. При наборе высоты, например, в упрощенную систему действующих на ВС сходящихся сил входят (рис. 3.1.22):
Аналогичным образом упрощают систему сил, действующих на ВС и в других режимах полета.
Пример. Ось колеса шасси легкого самолета крепится к фюзеляжу с помощью трех шарнирно закрепленных подкосов (рис. 3.1.23), оси которых пересекаются в точке О. Ось подкоса 1 совпадает с осью колеса, подкос 2 расположен в горизонтальной плоскости под углом a = 30° к оси первого подкоса, а подкос 3 – в вертикальной плоскости под углом b = 60°. На колесо действуют силы Р = 10 кН и F = 3 кН. Определите усилия в подкосах. Решение. Рассмотрим равновесие колеса. На колесо действуют две активные силы ( ∑ Fix =0; – F – S2 sin a = 0; S2 = – 6 кН. ∑ Fiy =0; P + S3 sin b = 0; S3 = – 11,5 кН. ∑ Fiz =0; S1 + S2 cos a + S3 cos b = 0; S1 = 11 кН. Освобождая тело от связей, мы полагали все стержни растянутыми. Знак «минус» в полученных значениях реакций S2 и S3 означает, что в действительности они сжаты. Тема 3. Теория пар сил Момент силы относительно центра. Опыт показывает, что эффект действия силы, приложенной к телу (например, к рычагу, штурвалу), на разных расстояниях от точки закрепления тела, зависит от так называемого момента силы относительно точки закрепления. Моментом силы M0( где h – кратчайшее расстояние от центра О до линии действия силы Момент силы считается положительным, если сила стремится повернуть тело вокруг центра О против хода часовой стрелки и отрицательным, если по ходу часовой стрелки (рис. 3.1.24, 3.1.25). Момент силы измеряется в Н·м.
Графически абсолютная величина момента силы относительно центра О выражается удвоенной площадью ΔОАВ: M0 (

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|

 ) ≡(
) ≡(  ), т.к. (
), т.к. (  ) ≡ 0 (рис. 3.1.3).
) ≡ 0 (рис. 3.1.3).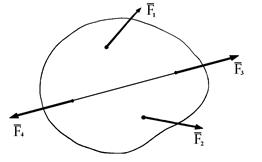
 (рис. 3.1.4). Добавим в точке В, выбранной произвольно на линии действия силы
(рис. 3.1.4). Добавим в точке В, выбранной произвольно на линии действия силы  и
и  равных по абсолютной величине
равных по абсолютной величине  , но приложенную не в точке А, а в точке В. Отсюда следует, что сила, приложенная к АТТ, есть вектор скользящий.
, но приложенную не в точке А, а в точке В. Отсюда следует, что сила, приложенная к АТТ, есть вектор скользящий.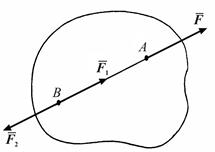
 , т.е. выражается по модулю и направлению диагональю параллелограмма, построенного на этих силах (рис. 3.1.5):
, т.е. выражается по модулю и направлению диагональю параллелограмма, построенного на этих силах (рис. 3.1.5): . (3.1.1)
. (3.1.1)
 Аксиома 5. Если деформируемое тело под действием системы сил находится в равновесии, то при отвердевании его равновесие сохраняется.
Аксиома 5. Если деформируемое тело под действием системы сил находится в равновесии, то при отвердевании его равновесие сохраняется.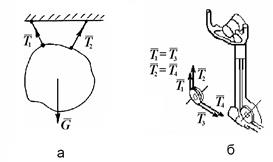


 может иметь любое направление в плоскости, перпендикулярной оси шарнира. Направление реакции зависит от величины и направления действующих на тело сил. Реакция подвижного шарнира всегда направлена по нормали к опорной поверхности шарнира (рис. 3.1.12, б, в).
может иметь любое направление в плоскости, перпендикулярной оси шарнира. Направление реакции зависит от величины и направления действующих на тело сил. Реакция подвижного шарнира всегда направлена по нормали к опорной поверхности шарнира (рис. 3.1.12, б, в).

 Неподвижная защемляющая опора или жесткая заделка. На заделанный конец балки со стороны опоры действует система распределенных сил, которую заменяем эквивалентной системой сосредоточенных сил
Неподвижная защемляющая опора или жесткая заделка. На заделанный конец балки со стороны опоры действует система распределенных сил, которую заменяем эквивалентной системой сосредоточенных сил  и моментом МА, приложенных в точке А (рис. 3.1.15).
и моментом МА, приложенных в точке А (рис. 3.1.15). т.к. cos(180 – a) = –cosa,то получим
т.к. cos(180 – a) = –cosa,то получим , (3.1.2)
, (3.1.2) . (3.1.3)
. (3.1.3)
 , а
, а  , то
, то  .
. или
или  . (3.1.4)
. (3.1.4) .
. ,
, лежащие в одной плоскости. Перенесем силы
лежащие в одной плоскости. Перенесем силы  будучи уравновешивающей системы сил
будучи уравновешивающей системы сил 
 ,
, – аэродинамическая сила крыла;
– аэродинамическая сила крыла; – сила лобового сопротивления;
– сила лобового сопротивления; – аэродинамическая подъемная сила крыла.
– аэродинамическая подъемная сила крыла. – сила тяжести (вес самолета);
– сила тяжести (вес самолета); – тяга винта (или газотурбинного двигателя);
– тяга винта (или газотурбинного двигателя); – сила лобового сопротивления самолета;
– сила лобового сопротивления самолета; – аэродинамическая подъемная сила.
– аэродинамическая подъемная сила.

 и
и  . Выбираем оси координат так, чтобы решение задачи было наиболее простым. Составляем условия равновесия колеса, находящегося под действием пространственной системы сходящихся сил
. Выбираем оси координат так, чтобы решение задачи было наиболее простым. Составляем условия равновесия колеса, находящегося под действием пространственной системы сходящихся сил  :
:
 Момент силы относительно центра как векторное произведение. Введенного понятия «момент силы относительно центра как алгебраическая величина» оказывается недостаточно в случае сил, произвольно расположенных в пространстве. Плоскости поворота у разных сил будут различными и должны задаваться дополнительно. Удобно ввести понятие «момент силы относительно центра как вектор», модуль которого равен произведению модуля силы на ее плечо, а направление перпендикулярно плоскости, проходящей через линию действия силы и центр момента.
Момент силы относительно центра как векторное произведение. Введенного понятия «момент силы относительно центра как алгебраическая величина» оказывается недостаточно в случае сил, произвольно расположенных в пространстве. Плоскости поворота у разных сил будут различными и должны задаваться дополнительно. Удобно ввести понятие «момент силы относительно центра как вектор», модуль которого равен произведению модуля силы на ее плечо, а направление перпендикулярно плоскости, проходящей через линию действия силы и центр момента.