
|
|
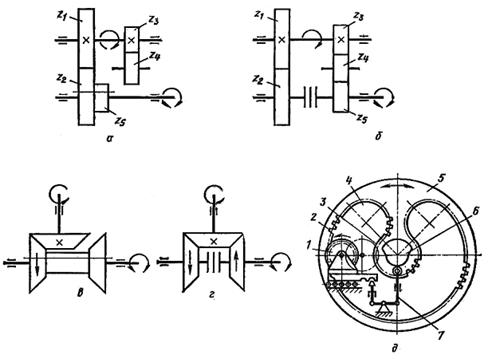
Типовые механизмы станков: реверсивные механизмы, обгонные механизмы, механизмы прерывистых движений, суммирующие механизмы. Их назначение, конструктивное исполнение.Реверсивные механизмы Реверсивные механизмы используются для изменения направления движения исполнительных органов станка. Реверсирование движений может осуществляться посредством реверсирования электродвигателей, гидродвигателей и механических устройств. В станках с механическими связями используются, как правило, механические реверсивные механизмы. На рис. 2.21 приведены схемы наиболее распространенных реверсивных механизмов.
Рис.2.21. Реверсивные механизмы: а ─ с передвижной шестерней; б ─ с фрикционной муфтой; в, г ─ с коническими колесами; д ─ с составным колесом
Реверсивные механизмы с цилиндрическими колесами основаны на передаче вращательного движения от входного вала к выходному или через зубчатую передачу z1/z2 (рис. 2.21,а,б), или с использованием промежуточного колеса, т.е. z3/z4/z5. При этом управление реверсированием может осуществляться посредством передвижной шестерни (блок колес z2 – z5) или посредством кулачковой или фрикционной муфты с ручным или электромагнитным управлением. Работа реверсивных устройств с коническими колесами основана на том, что два конических колеса, установленных на выходном валу, находясь в зацеплении с колесом входного вала, вращаются в противоположные стороны (рис. 2.21, в, г). Управление реверсированием обеспечивается или перемещением блока конических колес, или с использованием переключающей муфты. Реверсивный механизм с составным колесом используется во внутренних связях современных зубообрабатывающих станков для обработки конических зубчатых колес с прямыми и с круговыми зубьями.
Суммирующие механизмы В зубообрабатывающих и ряде других станков с механическими связями применяют суммирующие механизмы, называемые дифференциалами. При этом кинематическая структура станков, одинаковых по назначению, становится различной в зависимости от того применен в ней дифференциал или нет. С помощью дифференциалов создают несколько элементарных движений на одном исполнительном звене. Дифференциалы позволяют изменять скорость каждого элементарного движения, не изменяя скорости остальных алгебраически складываемых движений, прекращать любое элементарное движение и вновь создавать его в требуемый по циклу работы станка момент времени. Схемы дифференциалов, применяемых в станках, зависят от вида используемых передач. А все их многообразие состоит из двух больших групп: планетарные и непланетарные дифференциалы.
Планетарный дифференциал с коническими колесами. При сообщении ведущим звеньям дифференциала (рис. 2. 24, а), например, водилу В и зубчатому колесу Z2 вращательных движений соответственно пв (или
а б Рис. 2.24. Дифференциал с коническими колесами
В современных металлорежущих станках используются оба типа планетарных дифференциалов. Выбор схемы планетарного дифференциала с цилиндрическими или коническими колесами зависит от традиций, сложившихся в соответствующих конструкторских бюро. Дифференциал с реечной передачей. При вращении зубчатого колеса и одновременном его перемещении (рис. 2.25) рейка совершит суммарное перемещение. Дифференциал с передачей винт – гайка. При вращении ходового винта (рис. 2.26) и вращении маточной гайки от ходового вала через передачу z1/z2,
Рис. 2.25. Дифференциал с реечной передачей
Рис. 2.26. Дифференциал с передачей винт - гайка
гайка получит суммарное продольное перемещение Дифференциал с червячной передачей. При вращении червяка и его поступательном перемещении (рис. 2.27) червячному колесу будет сообщено
суммарное вращательное движение с круговой частотой. Дифференциал с косозубыми колесами. При вращении и поступательном перемещении ведущего колеса (рис. 2.28) ведомое колесо получит суммарное вращательное движение. Механизмы обгона
а Рис. 2.30. Механизмы обгона

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|
 Планетарный дифференциал с цилиндрическими колесами. Находящиеся в зацеплении между собой колеса с числами зубьев
Планетарный дифференциал с цилиндрическими колесами. Находящиеся в зацеплении между собой колеса с числами зубьев  и
и  ,
,  связанные рычагом – водилой В, представляют собой дифференциал с цилиндрическими зубчатыми колесами (рис.2.22). При сообщении ведущим звеньям колесу
связанные рычагом – водилой В, представляют собой дифференциал с цилиндрическими зубчатыми колесами (рис.2.22). При сообщении ведущим звеньям колесу  и водилу В соответственно вращательных движений
и водилу В соответственно вращательных движений  и
и  на ведомом звене – колесе
на ведомом звене – колесе  ) и п2
) и п2  на ведомом звене – колесе Z1 произойдет алгебраическое сложение этих движений.
на ведомом звене – колесе Z1 произойдет алгебраическое сложение этих движений.


 В ряде случаев вращение одному валу по двум кинематическим цепям может быть передано через механизм обгона. На рис. 2.30, а представлен механизм обгона, состоящий из храпового колеса 1, закрепленного на валу 5, и собачки 3, связанной с диском 2. Этот диск свободно вращается на валу 5 и может приводиться в движение от зубчатого колеса 4. При сообщении вращения диску 2 по стрелке, собачка 3 поведет храповое колесо с валом 5. Если последнему сообщить большую скорость вращения в том же направлении от другого источника движения, то он будет обгонять диск 2; собачка 3 в этом случае препятствовать обгону не будет. После выключения быстрого вращения вала 5 собачка 3 зацепит храповое колесо и поведет его снова. Таким образом, храповой механизм обгона позволяет, не выключая привода медленного вращения, включить ускоренное вращение вала 5.
В ряде случаев вращение одному валу по двум кинематическим цепям может быть передано через механизм обгона. На рис. 2.30, а представлен механизм обгона, состоящий из храпового колеса 1, закрепленного на валу 5, и собачки 3, связанной с диском 2. Этот диск свободно вращается на валу 5 и может приводиться в движение от зубчатого колеса 4. При сообщении вращения диску 2 по стрелке, собачка 3 поведет храповое колесо с валом 5. Если последнему сообщить большую скорость вращения в том же направлении от другого источника движения, то он будет обгонять диск 2; собачка 3 в этом случае препятствовать обгону не будет. После выключения быстрого вращения вала 5 собачка 3 зацепит храповое колесо и поведет его снова. Таким образом, храповой механизм обгона позволяет, не выключая привода медленного вращения, включить ускоренное вращение вала 5.