|
|
Создание файла упакованной базы данных платыУпакованная база данных ПП представляет собой базу данных ПП, в которой расположены корпуса компонентов, содержащиеся в базе данных принципиальной электрической схемы, из которой перенесены также все электрические связи и информация о компонентах. Файл упакованной базы данных ПП служит входным файлом для ручного или интерактивного размещения компонентов на ПП с помощью программы РСВ Editor. Файл упакованной базы данных ПП создается в Schematic Tools => Package Schematic (Схемные инструменты => Упаковка схемных элементов). Входными данными для данной программы являются: § файлы электрических связей *.nlt баз данных электрических принципиальных схем, находящихся в каталоге текущего проекта; § файл перекрестных ссылок *.fil, выбранного в пункте управляющей оболочки Design Manager => Design Maintenance (Администратор системы => Сопровождение проектов) для текущего проекта; § файл конструктива ПП, который может содержать предварительно размещенные компоненты *.pcb; § файлы корпусов элементов *.prt, на которые есть либо ссылки в файле перекрёстных ссылок, либо они должны быть заданы в атрибутах PRT (табл. 2.33) символов компонентов. § Выходными данными программы являются: § файл упакованной базы данных ПП (*,pcb), который можно редактировать в программе РСВ Editor (Технологический редактор); § командный файл изменения базы данных (*.upd); § аннотированный список связей (*.bnl), который служит входным файлом для программы Report Generator (Составление отчетов) или программ интерфейса с другими пакетами САПР.
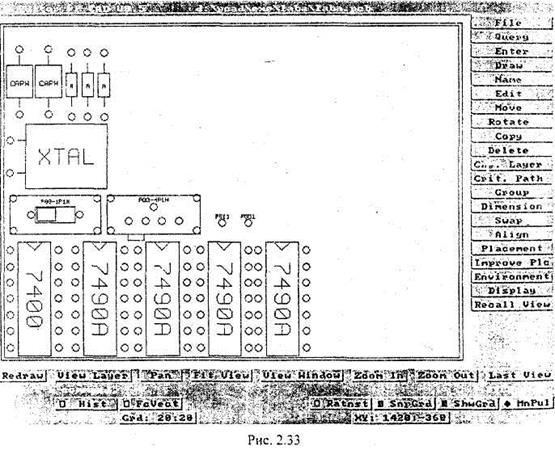
Меню программы Package Schematic (Упаковка схемных элементов), представленное на рис. 2.32, содержит следующие строки. Automatic Part Generation - автоматическая генерация корпусов компонентов по их символам на основании корпусов прототипов, имена которых помещены в атрибутах GFP (табл. 2.33) символов: § Off- режим выключен; § Create Non-existing Parts - создание только корпусов, отсутствующих в библиотеках и файлах, а также каталогах, указанных в разделе Set Libs.&Search Paths; § Create All Parts - создание всех корпусов, независимо от того, есть ли они в библиотеках или нет. ПРИМЕЧАНИЕ 18 1. При режиме Create Non-existing Parts; если программа не находит никаких корпусов в текущем каталоге, или не верно заданы маршруты поиска в разделе Set Libs.&Search Paths (Задание имен библиотек и библиотечных файлов), то все корпуса создаются автоматически. 2. Если на предварительно подготовленной базе данных ПП уже установлены какие-либо корпуса, то они не будут заново генерироваться программой в любых режимах. Back-Annotate Schematic Sheets - присвоение позиционных обозначений компонентам в электрических схемах, кроме тех, которые были проставлены вручную, и создание бинарного файла связей (*.bnl) (табл. 2.1), в котором для всех компонентов указаны их позиционные обозначения и номера выводов. Replaced PCB Filename - имя входного файла конструктива ПП с предварительно размещенными компонентами (laba.pcb). Output PCB Filename - имя выходного файла конструктива ПП (labal.pcb). Attributes - перечень атрибутов символов компонентов электрической схемы и цепей, которые должны быть перенесены в корпуса компонентов в файле упакованной базы данных ПП и на ПП: Component - атрибуты компонентов; Net Attributes - атрибуты цепей, С помощью кнопки RUN запускается последовательность выполнения программ. Сначала с помощью программы PC-NODES составляются списки электрических связей всех баз данных электрических схем, находящихся в текущем каталоге. Программой PC-LINK объединяют их и программой РС-РАСК составляется файл упакованной базы данных. (В ПРИЛОЖЕНИИ 1 приведены сообщения об ошибках, которые могут возникать при упаковке.) Упакованная база данных ПП представляет собой ПП с предварительно размещенными компонентами, по периферии которой помещены корпуса всех остальных компонентов, как показано на рис. 2.33. Далее с помощью программы PCB Editor производится размещение компонентов на ПП. Руководствуясь рассмотренным примером, создайте упакованную базу данных ПП для своего варианта. После создания всех файлов и сохранения их на жестком диске компьютера, не забудьте переписать их себе на дискету, для дальнейшей работы.
Контрольные вопросы 1. Этапы подготовки схемы электрической принципиальной к трассировке ПП. 2. Формирование списка цепей в двоичном виде. Назначение этапа и его особенности. Входные и выходные данные программы. 3. Проверка принципиальной схемы. Назначение этапа и его особенности. Входные и выходные данные программы. 4. Создание файла перекрестных ссылок. Назначение этапа и его особенности. Входные и выходные данные программы. 5. Этапы создания файла конструктива ПП. Назначение и его особенности. Входные и выходные данные программы. 6. Этапы создания файла упакованной базы данных ПП. Особенности. Входные и выходные данные программы. 7. Связь входных и выходных данных на всех этапах создания файла упакованной базы данных ПП. 8. Возможности для автономного запуска программ PC-NODES, PC-LINK, PC-PACK.
ЗАДАНИЕ 5. РАЗМЕЩЕНИЕ РАДИОЭЛЕМЕНТОВ НА ПП. ТРАССИРОВКА СОЕДИНЕНИЙ Цель задания Целью задания является ознакомление с методикой размещения радиоэлементов на ПП и трассировки соединений на конкретном примере, и приобретение практических навыков в обращении с графическим редактором PC-CARDS (режим DETL) САПР P-CAD 8.5.
2.6.1 Порядок выполнения задания
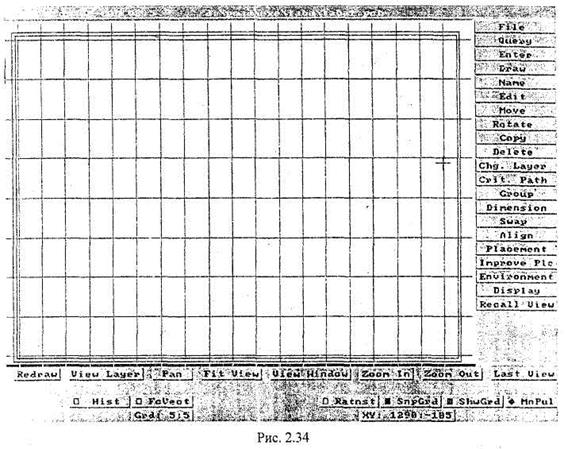
1. Загрузите в графическом редакторе PC-CARDS (PCB Tools => PCB Editor (Технологические инструменты => Технологический редактор)), файл упакованной базы данных ПП (lobal.pcb). Перед Вами будет изображение, приведенное на рис. 2.33. Если элементы схемы находятся на ПП, перенесите все элементы на поле рядом с ПП, используя команду Move => Object (Move => Objects) (Перенос => Объект(Объекты)). 2. Воспользовавшись командой Placement => Define Lattices => Enter Spacing (LATP) (Размещение => Задание углов сетки), задайте координаты узлов сетки. На запрос программы: «Enter x spacing:» (Введите шаг по оси X) «Enter у spacing:» (Введите шаг по оси У) введите последовательно 150 и 250. После этого необходимо задать углы окна сетки. В нашем случае окно задания сетки совпадает с окном поля, разрешенным для разводки, выполненном в слое BRDOUT, поэтому на последующие запросы системы: «Lattice window: corner 1.» (Окно сетки: угол 1.) «Lattice window: corner 2.» (Окно сетки: угол 2.) необходимо указать противоположные углы прямоугольника, обозначающего зону, разрешенную для трассировки (рис. 2.34). Если размеры сетки Вас не устраивают, то выбрав ещё раз команду Placement => Define Lattices => Enter Spacing (LATP) (Размещение => Задание углов сетки), можно задать её размеры снова, перед этим ответив на запрос системы: «Lattice already defined. Overwrite? Yes\No» (Сетка уже определена. Переписать? Да\Нет)
ПРИМЕЧАНИЕ 19 Если команда Placement => Define Lattices => Enter Spacing (Размещение => Задание углов сетки), для данного проекта выполняется впервые, то создается слой LAT1, он переводится в активное состояние и в нем создается сетка. В противном случае сетка в слое LAT1 заменяется новой. Если необходимо создать несколько сеток (например, одну для расстановки компонентов, другую, для прокладки трасс), пользователь вручную с помощью команды View Layer (Просмотр слоя) создает слои LAT2, LAT3, активизирует соответствующий слой, и затем по команде Placement => Define Lattices => Enter Spacing) (Размещение => Задание углов сетки) формирует необходимое число сеток. При этом на запрос системы: «Lattice already defined. Overwrite? Yes\No» (Сетка уже определена. Переписать? Да\Нет) необходимо ответить «No».
При ответе «Yes» вместо старой сетки будет создана новая. 2. После этого расставьте микросхемы так, чтобы соблюдался определённый геометрический порядок, например, как представлено на рис. 2.35. Для простоты создадим ПП, с одной стороны которой (слой СОМР) будут располагаться компоненты, с другой (слой SOLDER) - будет производиться прокладка проводников. Это связано с тем, что элементы применяемые нами в процессе компоновки и трассировки ПП, имеют штыревые контакты. При наличии элементов с планарными контактами, размещение компонентов можно производить с обеих сторон ПП. Переключение между слоями производится с помощью команды Change Layer => Objects (Смена слоя => Объект), Change Layer => Component (Смена слоя => Компонент).
ПРИМЕЧАНИЕ 20 Перед дальнейшим размещением элементов стоит напомнить Вам немного теории по алгоритмам размещения компонентов. Постановка задачи: размещение компонентов. Исходной информацией для этой задачи являются: данные о конфигурации и размерах коммутационного пространства (ПП), количество и геометрические размеры конструктивных элементов, ряд ограничений на взаимное расположение элементов, учитывающее особенности разрабатываемой конструкции. Задача размещения компонентов сводится к отысканию для каждого элемента таких позиций, при которых оптимизируется показатель качества. Основная сложность в постановке задачи - выбор целевой функции. Это связано с тем, что одной из главных целей размещения является создание наилучших условий для дальнейшей трассировки соединений, что невозможно проверить без проведения самой трассировки. Любые другие способы оценки качества размещения не гарантируют получения оптимального результата, т.к. печатные проводники - криволинейные отрезки конечной ширины, конфигурация которых определяется в процессе их построения и зависит от порядка проведения соединений. 3. Все применяемые в настоящее время алгоритмы размещения используют промежуточные критерии, которые лишь качественно способствуют решению задачи оптимальной трассировки. К таким критериям относятся: § минимум суммарной взвешенной длины соединений; § минимум числа соединений, длина которых задана; § минимум числа пересеченных проводников; § максимальное число соединений между элементами, находящихся в соседних позициях, либо в позициях, указанных разработчиком; § максимум числа цепей доступных операций. Наибольшее распространение получил первый критерий, так как уменьшение длины соединений улучшает электрические характеристики, упрощает трассировку и снижает трудоёмкость изготовления. 4. В зависимости от конструкции коммутационной платы (ПП) и способа выполнения соединений, расстояние между позициями установки элементов подсчитываются по одной из формул: fij = | dij= где xi, xj, yi, yj, - координаты, i, j - позиции коммутационной платы (ПП). При практической реализации алгоритмов размещения часто используют представления конструктивных элементов и позиций на коммутационном поле точками, совпадающими с их геометрическими центрами, а все соединения приводят к попарно взвешенным связям. Весовые оценки учитывают такие характеристики схем, как число электрических цепей между элементами, теплонагруженность элементов, распространение сигналов в цепях и пр. 5. В общем виде задача размещения компонентов на коммутационной плате формулируется следующим образом. Задано множество конструктивных элементов R={rl, r2, ..rn}. Множество связей между элементами V={vl, v2, ..vp}. .Множество позиций на коммутационной плате T={t1, t2, ..tk}. Необходимо найти положение множества R на множестве Т, которое обеспечивает экстремум целевой функции. Обычно поле позиции имеет форму прямоугольника Pab=axb с координатами: 0<х<а; о<у<b. Плата разбивается на позиции, число которых больше гаи равно числу размещаемых элементов (сетка, созданная по команде Placement => Define Lattices => Enter Spacing (Размещение => Задание углов сетки)). В результате получены фиксированные позиции для установки элементов. Перед разбиением платы на позиции выделяют ряд областей для размещения выходных контактов блок-схем, а также запрещенные области (В САПР P-CAD создаются барьеры, которые препятствуют проведению трассировки и\или компоновки. Барьеры создаются на ПП при помощи команд Draw => Polygon (Рисование => Полигон), Draw => Rectangle (Рисование => Прямоугольник), Draw => Filled Rectangle (Рисование => Закрашенный прямоугольник), Draw => Circle (Рисование => Окружность), Draw => Filled Circle (Рисование => Закрашенная окружность) в зависимости от нужной геометрии, в необходимых слоях (табл. 2.20)). Все компоненты, подлежащие размещению, условно разбиваются на три группы: § нефиксированные элементы, местоположение которых заранее не известно -q; § граничные элементы, к которым относятся элементы, связанные с разъемами, осуществляющими электрическую связь с элементами, расположенными на других платах. Число таких элементов h-q; § элементы, местоположение которых определено. Число таких элементов n-h. Ограничение на размещение элементов всех трёх групп имеют следующий вид: 1<i<q : {x*<xi<a-x*, y*<yi<b-y* q+1<i<h: {xi=x*, y*<yi<b-y* или {x*<xi<a-x*,yi=y* h+1<i<n: {xi=Xi, yi=Yi где x*, у* - координаты центра левой нижней позиции Xi,Yi- -координаты центра i-го фиксированного элемента. Оптимизацию размещения осуществляют, как правило, локально из некоторого случайного или интуитивно выбранного первоначального элемента. По принципу реализации известные алгоритмы размещения можно разделить на алгоритмы, использующие непрерывно-дискретные и дискретные методы оптимизации. Эффективность того или иного алгоритма оценивают по результатам решения типовых конструкторских задач. 6. При использовании непрерывно-дискретных методов оптимизации задача размещения решается в два этапа: § на первом этапе определяют координаты местоположения центров элементов, при котором целевая функция F имеет экстремальное значение; § на втором - полученные координаты «округляются» в фиксированные целочисленные значения координатной сетки, нанесенной на поверхность коммутационной платы. Данные алгоритмы можно разделить на алгоритмы, использующие градиентные и динамические методы. 7. В дискретных методах оптимизации модель коммутационного пространства представляют в виде множества фиксированных координат позиций. Задача размещения сводится к сравнению различных вариантов, закрепления элементов в этих позициях и выбору того из них, который обеспечивает экстремальное значение целевой функции F. В этих условиях для нахождения глобального экстремума F необходим полный перебор всех возможных вариантов размещения, т.е. для оптимального размещения n элементов в k позициях следует осуществить Данные алгоритмы можно разделить на § Алгоритмы случайного поиска: o алгоритмы слепого поиска; o алгоритмы случайного блуждания; o комбинированные алгоритмы случайного поиска. § Алгоритмы назначения: o алгоритмы линейного назначения; o алгоритмы квадратичного назначения. § Эвристические алгоритмы: o интеграционные алгоритмы; o последовательные алгоритмы.
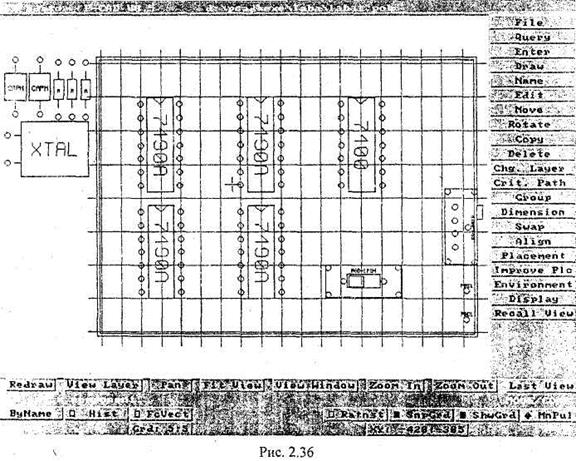
3. Воспользовавшись командой Move => Component (Перенос => Компонент) разместите на ПП переключатели и одиночные выводы к цепям питания и «земли», например, как показано на рис. 2.36.
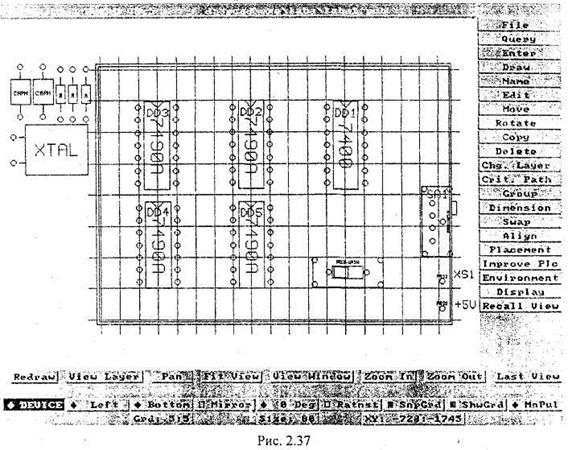
4. Для облегчения читаемости чертежа обозначьте выставленные на ПП компоненты с помощью команды Name => Component (Имя => Компонент), перед этим с помощью команды View Layer (Просмотр => Слоя), сделав активным слой DEVICE. Надписи в слое DEVICE разместите либо в пределах корпуса элемента, либо за пределами ПП, чтобы не «перегружать» чертеж (рис. 2.37).
5. При ручной компоновке можно пользоваться дополнительными функциями программы РСВ Editor (Технологический редактор), которые могут оказать существенную помощь разработчику. К дополнительным функциям можно отнести гистограмму заполнения платы, фактор улучшения и силовые векторы. Для использования этих инструментов Вам необходимо воспользоваться программой Placement => Histogram (Размещение => Гистограмма). И для начала работы необходимо настроить конфигурацию (Piacement => Histogram => Configure (Размещение => Гистограмма => Конфигурация)). Меню программы высветит следующие сообщения: «Discrete Part Force Vectors. Yes\No» (Силовые векторы дискретных компонентов. Да\Нет.) «Histo Block width. Narrow\Wide.» (Ширина графики элемента гистограммы. Дискретные линии\Сплошные полосы.) «Routing Grid. 1 \ 100» (Сетка трассировки. 1\100) «Number of Signal Layers.»(Число силовых слоев) необходимо ответить: Yes, Wide, 100, 2. Для использования гистограммы необходимо сначала выполнить одну из команд перемещения, вращения, переназначения, допускающие использование гистограммы. После этого на строке состояния появятся поля Hist и FcVect, которые необходимо активизировать нажатием на них курсором мыши. На пересечении осей гистограммы, появится цифра, характеризующая фактор улучшения размещения компонентов. Длина и цвет линии гистограммы определяют процентное соотношение между использованными каналами трассировки и общим числом каналов, определяемое координатной сеткой ресурсов. Цвет линий гистограммы определяет степень перегрузки каналов: § зеленый- использовано от 0 до 35% каналов; § желтый - 35-50%; § красный - больше 50%. Длина каждой линии гистограммы увеличивается по мере возрастания перегрузок каналов. Фактор улучшения отражает изменение перегруженности каналов по отношению к моменту, когда гистограмма была включена первый раз. Если в результате изменений в размещении перегрузка каналов снижается, фактор улучшения возрастает, если перегрузка увеличивается, то фактор улучшения снижается. ПРИМЕЧАНИЕ 21 Приведем один из примеров трассировки данной ПП. Он не является эталонным. Основная задача его ознакомить Вас с основными приемами и действиями, которые необходимо применить по компоновке и трассировке элементов. 6. Пользуясь командами вставки печатных проводников и полей Enter => Wire (Ввод => Электрическая связь), Enter => Polygon (Ввод => Полигон), редактирования проводников Edit => Add Vertex (Редактирование => Добавить излом), Edit => Add Via (Редактирование => Добавить переходное отверстие), Edit => Delete Segment (Редактирование => Удалить сегмент), Edit => Delete Vertex (Редактирование => Удалить излом), Edit => Delete Via (Редактирование => Удалить переходное отверстие) и пр., проложите проводники, которые соединяют выводы 1 и 12 DD2-DD5, выводы 12 и 13, 9 и 10, 1 и 2 и другие выводы, внутри элемента DD1 и прочие трассы.
ПРИМЕЧАНИЕ 22 Волновой алгоритм построения трасс Ли. 1. Основные принципы построения трасс с помощью волнового алгоритма сводятся к следующему. Все ячейки монтажного поля подразделяются на занятые и свободные. Занятыми считаются ячейки, в которых уже расположены проводники, построенные на предыдущих шагах, или находятся монтажные выводы элементов, а также ячейки, соответствующие границе платы и запрещенным для прокладывания проводников участкам. Каждый раз при проведении новой трассы можно использовать лишь свободные ячейки, число которых по мере проведения трасс сокращается. 2. На множестве свободных ячеек коммутационного поля моделируют волну влияний из одной ячейки в другую, соединяемых впоследствии общим проводником. Первую ячейку, в которой зарождается волна влияний, называют источником, а вторую - приемником волны. Чтобы иметь возможность сделать за прохождением фронта волны влияний, его фрагментам на каждом этапе присваивают некоторые веса: Pk = P(k-1)+F(xl,x2,..xg) где Рk, Р(к-1) - веса ячеек k-го и (к-1)-го фронтов; F(xl, x2,...xg) - весовая функция, являющаяся показателем качества проведения пути, каждый параметр которой х (i=l, 2,..g) характеризует путь с точки зрения одного из критериев качества (длины пути, числа пересечений и т.п.). 3. На Рk накладывают одно ограничение - веса ячеек предыдущих фронтов не должны быть больше весов ячеек последующих фронтов. Фронт распространяется только на соседние ячейки, которые имеют с ячейками предыдущего фронта либо общую сторону, либо хотя бы одну общую точку. Процесс распространения волны продолжается до тех пор, пока её расширяющийся фронт не достигнет приемника или на G-ом шаге не найдется ни одной свободной ячейки, которая могла бы быть включена в очередной фронт, что соответствует случаю невозможности проведения трассы при заданных ограничениях. 4. Если в результате распространения волна достигла приемника, то осуществляют «проведение пути», которое заключается в движении от приемника к источнику по пройденным на этапе распространения волны ячейкам, следя за тем, чтобы значения Рк монотонно убывали. В результате получают путь, соединяющий эти две точки. Из описания алгоритма следует, что все условия, необходимые для проведения пути, закладываются в правила приписания веса ячейки. 5. Чтобы исключить неопределенность при проведении пути для случая, когда несколько ячеек имеют одинаковый минимальный вес, вводят понятие путевых координат, задающих предпочтительность проведения трассы. Каждое направление кодируют двоичным числом по mod q, где q- число просматриваемых соседних ячеек. При этом чем более предпочтительно то или иное направление, тем меньший числовой код оно имеет. Приписание путевых координат производят на этапе распространения волны. При проведении пути движение от ячейки к ячейке осуществляют по путевым координатам.
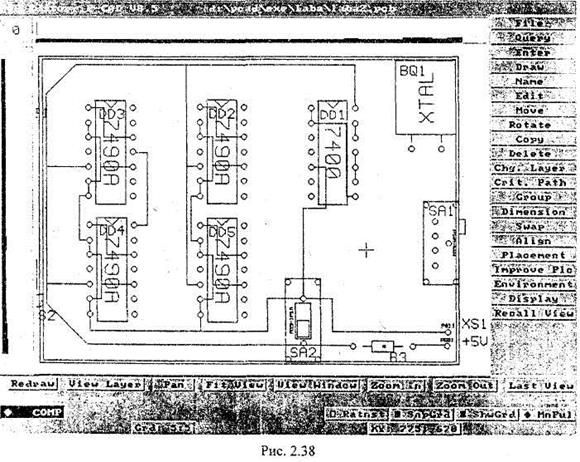
Проложите шины питания (+5V) и «земли» (XS1). Кроме рисунка принципиальной электрической схемы (рис. 2.17) необходимо иметь в виду, что в микросхеме DD1 питание подводится к 14 выводу, а «земля» к 7; в микросхемах DD2-DD5 питание подводится к выводу 5, «земля» к 10 выводу (см. ПРИЛОЖЕНИЕ 3). Для удобства идентификации тех или иных выводов пользуйтесь командами Query => (Информация => ). Прокладку трасс необходимо производить в слое SOLDER. Для предотвращения пересечений проводников используйте переходные отверстия pin.prt и прокладывайте небольшие перемычки в слое размещения компонентов СОМР. Результат трассировки представлен на рис. 2.38. Вставить на поле SA2 и R3, соединить с шинами (рис. 2.38). Если координатная сетка мешает, её можно отключить. Для этого выбрав, команду View Layer (Просмотр слоя), сделайте слой LAT не активным, то есть из состояния ABL переведите его в OFF.
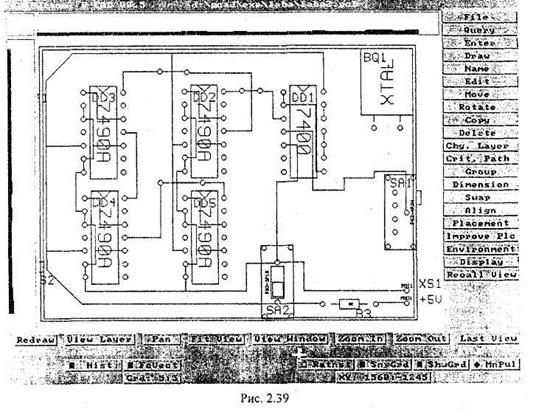
6. Произведите соединение вывода 11 DD2 с выводом 14 DD3 (цепь D2Q3D3C1). Предусмотрите с помощью двух сквозных отверстий переход проводника на сторону размещения компонентов (слой СОМР), чтобы пересекать шину +5V. Соедините те же выводы для элементов DD3 и DD4, DD4 и DD5 (цепи D3Q3D4C1, D4Q3D5C1). В последнем случае также предусмотрите переход проводника в слой СОМР, при огибании шины +5v. Проведите соединение вывода 3 DD1 с выводом 14 DD2 (цепь D3D2). Для этого необходимо предусмотреть проводник-перемычку в слое СОМР, чтобы избежать пересечения с цепью D2Q3D3C1. Соедините вывод 4 DD1 с SA1 (цепь SAIDl)(рис. 2.39).
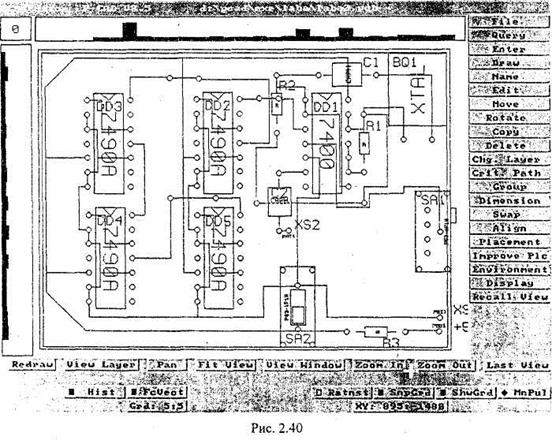
7. К выводам 9 и 12 DD1 проводниками подсоедините резистор R1. Цепь R1, вывод 12 обозначьте, как R1D1. Цепь R1, вывод 9 примет имя от цепи D1D2. От R1 проложите проводник до кварца BQ1.(Цепь R1BQ1). От другого вывода кварца проведите проводник к конденсатору С1 (цепь BQ1C1), а затем от второго вывода конденсатора до R2 (цепь C1R2). Соедините вывод 1 DD1 с выводом R2. Необходимо соединить R1 и R2. Для того чтобы проводник, соединяющий эти два резистора, не вошел в пересечение с цепями SA1D1 и SA2D1, введем на значительном удалении, по обе стороны от указанных цепей два сквозных отверстия pin.ptr. В слое SOLDER проложим проводник от вывода R1 к одному, а из вывода R2 к другому сквозному отверстию. После перехода в слой СОМР соединим два отверстия проводником. Обозначим получившуюся цепь, как и в схеме электрической принципиальной D1D2. Присоедините проводником вывод 6 DD1 к конденсатору С2. При помощи команды Enter => Component => PICKLIST => pgil (Ввод => Компонент => Список => pgil) разместите на плате элемент XS2. Соедините второй вывод конденсатора С2 с XS2 проводником. Обозначьте получившуюся цепь C2XS2 (рис. 2.40).
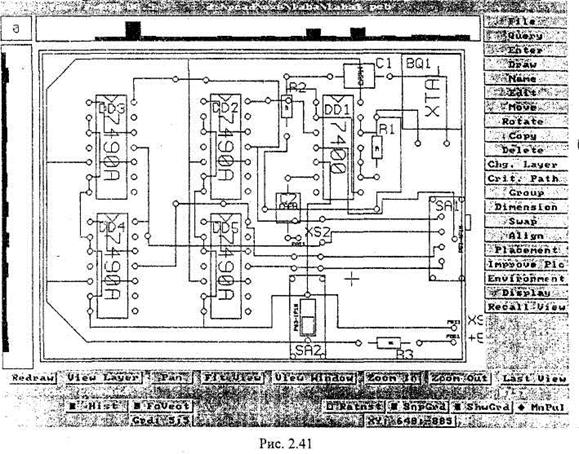
8. По обе стороны отрезка шины «земля», от вывода SA2 до вывода 5 компонента DD1, располагаем сквозные отверстия (8 штук) pin.prt. Причем, для того чтобы подвести проводник к цепи D3Q3D4C1, необходимо переходное отверстие разместить около этой цепи. Со стороны, ближней к переключателю SA1 (правее от отрезка) соедините четыре сквозных отверстия проводниками с четырьмя лепестками данного переключателя. Сквозные отверстия, находящиеся по левую сторону от шины «земля», руководствуясь рис. 2.17 поочередно присоедините к цепям D2Q3D3C1, D3Q3D4C1, D4Q3D5C1, и к выводу 11 DD5 проводники (Enter => Wire (Ввод => Электрическая связь)). После этого, перейдя в слой СОМР, проложите проводники -перемычки между четырьмя парами переходных отверстий, завершая соединение контактов SA1 с микросхемами DD2-DD5, Присвоив имена созданным цепям (D2Q3D3C1, D3Q3D4C1, D4Q3D5C1, SA1D5), трассировка платы может считаться завершенной (рис. 2.41). 9. Сохраните полученный результат (File => Save (Файл => Сохранить)) под именем laba.pcb. 10. Проведение трассировки производилось без должного анализа загруженности каналов и попыток улучшения местоположения компонентов. Об этом свидетельствуют три «всплеска» гистограммы, окрашенные в красные цвета. Это не может быть грубой ошибкой, но является нежелательным недостатком. Для устранения этих недостатков в последующем задании воспользуемся возможностью системы САПР P-CAD производить автоматическое размещение компонентов и трассировки соединений.
Руководствуясь рассмотренным примером, произведите компоновку элементов и трассировку ПП для своего варианта. После завершения работы с Вашим вариантом и сохранения результата на жестком диске компьютера, не забудьте переписать созданные файлы себе на дискету, для последующей работы с ним. Контрольные вопросы
1. Алгоритмы компоновки элементов на ПП. Краткое описание. Особенности и различия по отношению к другим алгоритмам. 2. Постановка задачи по компоновке элементов на ПП. 3. Алгоритмы компоновки элементов на ПП, использующие непрерывно-дискретные методы оптимизации. 4. Алгоритмы компоновки элементов на ПП, использующие дискретные методы оптимизации. 5. Алгоритмы трассировки печатных проводников. Краткое описание. Особенности и различия по отношению к другим алгоритмам. 6. Волновой алгоритм Ли. Основные принципы построения трасс. Общая блок-схема программы проведения пути с помощью волнового алгоритма Ли. 7. Модификации волнового алгоритма Ли. Особенности и различия по отношению к друг другу. Достоинства и недостатки.
ЗАДАНИЕ 6. РАЗМЕЩЕНИЕ РАДИОЭЛЕМЕНТОВ НА ПП И ТРАССИРОВКА СОЕДИНЕНИЙ В АВТОМАТИЧЕСКОМ РЕЖИМЕ
Цель задания
Целью задания является ознакомление с методикой размещения радиоэлементов на ПП и трассировки соединений в автоматическом режиме на конкретном примере, и приобретение практических навыков в обращении с графическим редактором PC-GARDS (режим DETL) САПР P-CAD 8.5

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|


 (2.1) -проведение проводников по кратчайшему пути.
(2.1) -проведение проводников по кратчайшему пути. |+|
|+|  | (2.2) -разводка проводников параллельно.
| (2.2) -разводка проводников параллельно. перестановок, поэтому дискретные методы оптимизации позволяют отыскать обычно только локальные экстремумы целевой функции.
перестановок, поэтому дискретные методы оптимизации позволяют отыскать обычно только локальные экстремумы целевой функции.