
|
|
Уравновешивание сил инерции кривошипно-ползунного механизмаРисунок 2 – Индикаторная диаграмма одноступенчатого компрессора
Исходные данные на проектирование приведены в таблице 1.
Таблица 1. Исходные данные
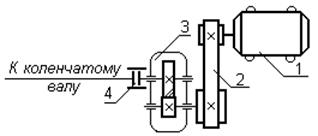
Рисунок 3 Схема привода Структурный анализ машинного агрегата
Кривошипно-ползунный механизм – плоский, четырёхзвенный (n = 4): звено 0 – стойка; звено 1– кривошип, совершает вращательное движение; звено 2 – шатун, совершает сложное плоскопараллельное движение (поступательное и вращательное); звено 3 (выходное) – ползун, совершает возвратно-поступательное движение.
Таблица 1.1 Характеристика кинематических пар
Определяем степень подвижности механизма по формуле (1) с учётом того, что
где
Это значит, что в данном механизме должно быть одно ведущее звено. В качестве ведущего звена принято звено 1 – кривошип. Раскладываем механизм на структурные группы. Прежде всего, отсоединяем группу Асура, состоящую из звеньев 2 и 3 и трёх кинематических пар: вращательных А и В и поступательной В0. Степень подвижности этой группы после присоединения к стойке равна:
Группа 2 – 3 является группой Асура 2-го класса 2-го порядка. После отсоединения указанной группы остался начальный механизм, состоящий из кривошипа 1, присоединённого к стойке кинематической парой О1, и обладающей степенью подвижности:
Это начальный механизм 1-го класса 1-го порядка. Данный кривошипно-ползунный механизм является механизмом 2-го класса 2-го порядка. Кинематический синтез кривошипно-ползунного механизма
Кинематический синтез механизма компрессора заключается в определении основных размеров звеньев кривошипно-ползунного механизма (КПМ), обеспечивающих заданные кинематические параметры. Из условия равенства времени перемещения поршня из крайнего верхнего положения в крайнее нижнее положение (хода поршня Н), соответствующего половине оборота кривошипа, следует:
где
Радиус кривошипа r:
Длину шатуна найдём по формуле:
Известные размеры звеньев дают возможность вычертить кинематическую схему КПМ, которая строится в масштабе на чертежном листе, при этом масштабный коэффициент длин
Приведённая длина шатуна:
Кинематический анализ кривошипно-ползунного механизма Аналитический метод В основу этого метода положены дифференциальные зависимости между перемещением, скоростью и ускорением точки. Перемещение ползуна в зависимости от угла поворота кривошипа определяем по формуле:
а текущее значение перемещений ползуна определяем по формуле:
где i = 0, 1, 2 …12 – номер положения механизма, соответствующий углу поворота кривошипа j = 0°, 30°, 60°…360°.
Для определения скорости точки используем формулу:
где
Аналогично находим ускорение:
где
Аналогично рассчитываем значения перемещения, скорости и ускорения для углов поворота кривошипа от 30° до 360° с интервалом 30°. Результаты расчетов сводим в таблицу 3.1.
Таблица 3.1 Результаты расчета аналитическим методом.
По результатам расчетов строим графические зависимости перемещений, скоростей и ускорений ползуна, а также их гармоник в функции угла поворота кривошипа на листе 1 графической части. Определяем масштаб по оси абсцисс:
где
Масштаб перемещений:
Масштаб скоростей:
Масштаб ускорений:
Проанализируем правильность построения графика: 1 начальные и конечные ординаты графиков за полный период вращения одинаковы; 2 скорости ползуна в его крайних положениях равны 0; 3 точке перегиба на кривой перемещений ползуна соответствуют экстремальные значения на графике скоростей и нулевые значения на графике ускорений; 4 нулевым значениям ординат на графике скоростей соответствуют экстремальные значения на графике ускорений Графический метод Разметка траекторий движения всех звеньев механизма осуществляется методом засечек. С этой целью угол поворота кривошипа разбивается на 12 равных частей, и строятся текущие положения кривошипа Текущее значение перемещений ползуна можно определить из плана положений механизма, как расстояние от крайнего верхнего положения ползуна (точка
Таблица 3.2. – Перемещения ползуна
Совмещенный план скоростей строим для двух промежуточных положений КПМ (при j = 60° и 210°). Построение планов скоростей и ускорений ведется в порядке присоединения групп Ассура к начальному механизму. Поскольку КПМ имеет одну степень подвижности, то заданное движение входного звена (в данном случае кривошипа
где
Известный по величине и направлению вектор скорости
При определении скорости точки В следует отметить, что ползун совершает возвратно-поступательное движение. Т.к. точка В одновременно принадлежит и ползуну, и шатуну, то для дальнейшего построения плана скоростей следует воспользоваться векторным уравнением:
где Для определения скорости точки В через точку а вектора
Зная относительную скорость точки В вокруг полюса точки А, можно определить угловую скорость шатуна:
где
Для определения скоростей центров тяжести звеньев следует воспользоваться соотношениями:
Т.е. абсолютная скорость Соединяем точку
Аналогично выполняем построения для φ=210°. Результаты планов сводим в таблицу 3.3.
Таблица 3.3 – Результаты построения планов скоростей
Построение плана ускорений необходимо начинать с вычисления и нанесения на план ускорения т. А кривошипа. В общем случае полное ускорение точки А складывается из нормального
Численное значение нормального ускорения определяется по формуле:
Направлено это ускорение параллельно отрезку Касательное ускорение определяется по формуле:
где Направлено ускорение Складывая геометрически нормальное и касательное ускорения, найдем полное ускорение точки А:
При равномерном вращении кривошипа ( Вычисленное нормальное ускорение изображаем на плане ускорений в виде отрезка
Далее переходим к определению ускорения точки В. В векторном виде:
где При известной вращательной скорости точки В вокруг полюса А (
Чертежное значение длины вектора Через точку а проводим прямую, параллельную текущему положению шатуна
Соединив точки а и в вектором
Для определения ускорений центров тяжести звеньев следует воспользоваться соотношениями:
т.е. нормальное ускорение
Зная величину касательного ускорения
Аналогично строим план ускорений для j = 210°. Результаты планов ускорений сводим в таблицу 3.4.
Таблица 3.4 – Результаты построения плана ускорений
Уравновешивание сил инерции кривошипно-ползунного механизма
Уравновешивание сил инерции КПМ производится с целью устранения переменных воздействий на опоры коленчатого вала, корпус и фундамент осуществляется с помощью противовесов, устанавливаемых на подвижные звенья. Для полного статического уравновешивания КПМ необходимо поставить противовесы и на кривошип, и на шатун. При этом добиваются постоянства положения центра масс всех подвижных звеньев механизма относительно стойки. Однако такое расположение противовесов приводит к значительному увеличению габаритов механизма, масс подвижных звеньев и динамических усилий в кинематических парах. Поэтому ограничиваются установкой противовеса только на кривошип (частичное уравновешивание) (рис. 4.1).
Рассчитаем массу противовеса. Площадь поршня:
Масса поршня:
Масса шатуна:
Масса кривошипа:
Расстояние от центра тяжести шатуна до пальца кривошипа:
Расстояние от центра тяжести кривошипа до оси его вращения:
Замещающая масса сосредоточенная в шарнирной точке А:
Массу противовеса определяем по формуле:

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|

 (1.1)
(1.1) степень подвижности механизма;
степень подвижности механизма; число звеньев механизма, включая стойку (пассивные звенья не учитываются);
число звеньев механизма, включая стойку (пассивные звенья не учитываются); число кинематических пар соответственно 5-го и 4-го классов (пассивные кинематические пары не учитываются).
число кинематических пар соответственно 5-го и 4-го классов (пассивные кинематические пары не учитываются). .
. .
. ,
, .
. , (2.1)
, (2.1) ход поршня, м;
ход поршня, м;  средняя скорость движения поршня, м/c;
средняя скорость движения поршня, м/c;  частота вращения коленчатого вала, об/мин.
частота вращения коленчатого вала, об/мин. м
м ,
, м
м , (2.2)
, (2.2) заданное отношение длины кривошипа к длине шатуна.
заданное отношение длины кривошипа к длине шатуна. м
м определяется как отношение истинной величины длины звена к длине отрезка на чертеже в мм:
определяется как отношение истинной величины длины звена к длине отрезка на чертеже в мм: (2.3)
(2.3)
 , (2.4)
, (2.4)
 , (3.1)
, (3.1) , (3.2)
, (3.2) (м).
(м). (м).
(м). , (3.3)
, (3.3)
 - первая и вторая гармонические составляющие скорости точки В; wкр – угловая скорость вращения кривошипа, рад/с:
- первая и вторая гармонические составляющие скорости точки В; wкр – угловая скорость вращения кривошипа, рад/с: , (3.4)
, (3.4) , рад/с
, рад/с (м/с)
(м/с) (м/с)
(м/с) (м/с)
(м/с) , (3.5)
, (3.5)
 - первая и вторая гармонические составляющие ускорения точки В.
- первая и вторая гармонические составляющие ускорения точки В. (м/с²)
(м/с²) (м/с²)
(м/с²) (м/с²)
(м/с²) ,
м
,
м
 ,
м
,
м
 ,
м/с
,
м/с
 ,
м/с
,
м/с
 ,
м/с
,
м/с
 ,
м/с²
,
м/с²
 ,
м/с²
,
м/с²
 ,
м/с²
,
м/с²
 (3.6)
(3.6) длина отрезка между точками 0 и 12.
длина отрезка между точками 0 и 12. .
. , м/мм.
, м/мм. ,
,  .
. .
. (за начало отсчета принимаем внешнее предельное положение кривошипа и шатуна, соответствующее верхней мертвой точке ползуна). Из полученных точек
(за начало отсчета принимаем внешнее предельное положение кривошипа и шатуна, соответствующее верхней мертвой точке ползуна). Из полученных точек  циркулем, расстояние между ножками которого равно длине шатуна АВ в масштабе построения, делаются засечки на траектории движения ползуна (прямая XX), т.е. получаем текущие положения ползуна (точки
циркулем, расстояние между ножками которого равно длине шатуна АВ в масштабе построения, делаются засечки на траектории движения ползуна (прямая XX), т.е. получаем текущие положения ползуна (точки  ), соединив которые с соответствующими точками
), соединив которые с соответствующими точками  и
и  ) и построить траекторию их движения. Все построения выполняем в тонких линиях, одно из промежуточных положений механизма выделяем основной линией (то, для которого будет построен один из планов скоростей и ускорений).
) и построить траекторию их движения. Все построения выполняем в тонких линиях, одно из промежуточных положений механизма выделяем основной линией (то, для которого будет построен один из планов скоростей и ускорений). ) до текущего положения (точки
) до текущего положения (точки  , м
, м
 . Вектор скорости точки А направлен по касательной к траектории движения, т.е. перпендикулярно радиусу
. Вектор скорости точки А направлен по касательной к траектории движения, т.е. перпендикулярно радиусу  , (3.7)
, (3.7) – угловая скорость кривошипа,
– угловая скорость кривошипа,  ; r – радиус кривошипа, м.
; r – радиус кривошипа, м.
 строим в виде отрезка
строим в виде отрезка  длиной 88 мм из выбранного полюса
длиной 88 мм из выбранного полюса  - плана скоростей (выполняем построения для j = 60°). Тогда масштаб плана скоростей:
- плана скоростей (выполняем построения для j = 60°). Тогда масштаб плана скоростей: ,
, 
 (3.9)
(3.9) - вектор абсолютной скорости точки В;
- вектор абсолютной скорости точки В;  - вектор относительной скорости точки В по отношению к точке А.
- вектор относительной скорости точки В по отношению к точке А. параллельно линии ХХ перемещения ползуна. На пересечении линий действия скоростей
параллельно линии ХХ перемещения ползуна. На пересечении линий действия скоростей  , м/с;
, м/с;  , м/с (3.10)
, м/с (3.10) м/с
м/с м/с
м/с ,
,  (3.11)
(3.11) - длина шатуна, м.
- длина шатуна, м.
 и
и  (3.12)
(3.12) м/с, а её графическое значение
м/с, а её графическое значение  мм; относительная скорость
мм; относительная скорость  м/с, а её чертежное значение
м/с, а её чертежное значение  мм (данные отрезки откладываются на плане скоростей).
мм (данные отрезки откладываются на плане скоростей). с полюсом плана скоростей
с полюсом плана скоростей  определит в масштабе плана скоростей
определит в масштабе плана скоростей  истинное значение абсолютной скорости точки
истинное значение абсолютной скорости точки  :
: , м/с. (3.13)
, м/с. (3.13) м/с
м/с , м/с
, м/с
 , м/с
, м/с
 , м/с
, м/с
 ,
,  , м/с
, м/с
 , м/с
, м/с
 и касательного
и касательного  ускорений:
ускорений: (3.14)
(3.14) , м/с² (3.15)
, м/с² (3.15) м/с²
м/с² от точки А к центру вращения
от точки А к центру вращения  .
. , м/с² (3.16)
, м/с² (3.16) - угловое ускорение кривошипа,
- угловое ускорение кривошипа,  .
. (3.17)
(3.17) ) его угловое ускорение
) его угловое ускорение  длиной 77,1 мм из выбранного полюса
длиной 77,1 мм из выбранного полюса  плана ускорений так, чтобы он был параллелен текущему положению кривошипа
плана ускорений так, чтобы он был параллелен текущему положению кривошипа  ,
,  (3.18)
(3.18)
 , (3.19)
, (3.19) - вектор полного ускорения точки В ползуна;
- вектор полного ускорения точки В ползуна;  - вектор полного ускорения точки А кривошипа;
- вектор полного ускорения точки А кривошипа;  - вектор нормального ускорения точки В в относительном движении по отношению к полюсу А;
- вектор нормального ускорения точки В в относительном движении по отношению к полюсу А;  - вектор касательного ускорения точки В относительно полюса А.
- вектор касательного ускорения точки В относительно полюса А. , м/с² (3.20)
, м/с² (3.20) м/с²
м/с² мм.
мм. , и откладываем на ней вектор
, и откладываем на ней вектор  в направлении от точки
в направлении от точки  проводим линию действия касательного ускорения, перпендикулярную данному положению шатуна. Из полюса плана ускорений
проводим линию действия касательного ускорения, перпендикулярную данному положению шатуна. Из полюса плана ускорений  ;
;  , м/с² (3.21)
, м/с² (3.21) м/с²
м/с² м/с²
м/с² , получаем полное ускорение точки В относительно полюса А:
, получаем полное ускорение точки В относительно полюса А: , м/с² (3.22)
, м/с² (3.22) м/с²
м/с² и
и  (3.23)
(3.23) м/с², а его чертежное значение
м/с², а его чертежное значение  мм. Нормальное ускорение
мм. Нормальное ускорение  м/с², а его чертежное значение
м/с², а его чертежное значение  мм (данные отрезки откладываются на плане ускорений). Точка
мм (данные отрезки откладываются на плане ускорений). Точка  на плане ускорений, определенная из подобия треугольников
на плане ускорений, определенная из подобия треугольников  и
и  , определит значения ускорений:
, определит значения ускорений: и
и  , м/с² (3.24)
, м/с² (3.24) м/с²
м/с² м/с²
м/с² , можно определить угловое ускорение шатуна:
, можно определить угловое ускорение шатуна: ,
, 
 ,
м/с²
,
м/с²
 ,
м/с²
,
м/с²
 ,
м/с²
,
м/с²
 ,
м/с²
,
м/с²
 ,
,
 ,
м/с²
,
м/с²
 ,
м/с²
,
м/с²
 (4.1)
(4.1) (4.2)
(4.2) (4.3)
(4.3) (4.4)
(4.4) м (4.5)
м (4.5) м (4.6)
м (4.6) (4.7)
(4.7) , т.к.
, т.к.  (4.8)
(4.8)