
|
|
Динамика материальной точкиФ И З И КА
МЕТОДИЧЕСКОЕ ПОСОБИЕ ПО ВЫПОЛНЕНИЮ КОНТРОЛЬНОЙ РАБОТЫ ДЛЯ СТУДЕНТОВ ЗАОЧНОЙ ФОРМЫ ОБУЧЕНИЯ
Казань – 2015 Раздел I. Физические основы механики Механическое движение – изменение с течением времени положения тела относительно других тел. Материальная точка – материальное тело, размерами которого можно пренебречь. Кинематика – изучает движение тел, не рассматривая причины, которые вызывают или изменяют это движение. Динамика – изучает законы движения тел и причины, которые вызывают или изменяют это движение. Поступательное движение – это движение, при котором любая прямая, жестко связанная с движущимся телом, остается параллельной своему первоначальному положению. При таком движении можно ограничиться рассмотрением одной точки тела, центра масс тела. Вращательное движение – это движение, при котором все точки тела движутся по окружностям, центры которых лежат на прямой, называемой осью вращения. В кинематике движение материальной точки описывается с помощью системы уравнений: где x, y, z – координаты материальной точки,
рис. 1 Траекториея движения - линия, описываемая материальной точкой в пространстве при своем движении. Основными кинематическими величинами являются: Перемещение – вектор, соединяющий начальное и последующее положение материальной точки. На рис. 1 Путь – длина траектории. Скорость – векторная величина, определяющая быстроту перемещения тела во времени. Мгновенная скорость– векторная величина, равная Средняя скорость – векторная величина, равная отношению приращения радиус-вектора Ускорение – векторная величина, характеризующая изменение скорости тела со временем, и равная первой производной от скорости по времени: Среднее ускорение за некоторый промежуток времени Ускорение можно представить в виде векторной суммы двух слагаемых
рис. 2 Первое слагаемое характеризует изменение скорости по модулю и называется тангенциальной составляющей (касательной) ускорения: Второе слагаемое характеризует изменение скорости по направлению и называется нормальным ускорением: Для прямолинейного равномерного движения: Для прямолинейного равнопеременного движения: При равномерном движении материальной точки по окружности тангециальное ускорение Вращательное движение описывается угловой скоростью Угловая скорость – векторная величина, определяемая первой производной угла поворота тела по времени и характеризует быстроту изменения угла поворота(рис.3):
рис. 3 Направление вектора угловой скорости определяется правилом правого винта. Угловое ускорение – векторная величина, определяемая первой производной угловой скорости по времени: Связь линейных кинематических величин с угловыми:
где R – радиус окружности.
Динамика материальной точки В основе динамики лежат три закона Ньютона. Первый закон: тело находится в состоянии покоя или прямолинейного равномерного движения до тех пор, пока внешнее воздействие не изменит это состояние. Второй закон: ускорение, с которым движется тело, прямо пропорционально действующей на него силе и обратно пропорционально его массе:
Векторная величина
Третий закон: две материальные точки взаимодействуют с силами, равными по модулю, но противоположными по направлению: Законы сохранения. Закон сохранения импульса: в замкнутой системе тел полный импульс сохраняется
Замкнутая механическая система – система тел, на которую не действуют внешние силы. Если масса системы не зависит от ее скорости, то импульс системы можно выразить через скорость центра масс системы. Центр масс (центр инерции) системы материальных точек (тела) есть точка С, положение которой определяется как
где Скорость центра масс Импульс системы равен Уравнение движения центра масс системы Если правая часть (результирующая всех внешних сил) равна нулю, то центр масс движется прямолинейно и равномерно, либо покоится. Движение некоторых тел сопровождается изменением их массы, например, масса ракеты уменьшается в результате истечения газов, образующихся при сгорании топлива. В этом случае уравнение движения
Количественной мерой механического движения и взаимодействия тел является механическая энергия. Полная механическая энергия равна сумме кинетической и потенциальной энергии Кинетическая энергия материальной точки массой
В разных инерциальных системах отсчета, движущихся друг относительно друга, скорость тела, следовательно, и его кинетическая энергия неодинакова. Потенциальная энергия – часть механической энергии системы тел, определяемая их расположением и характером сил взаимодействия между ними.
на высоту h.
Изменение механического движения тела вызывают силы, действующие на него со стороны других тел. Силы совершают работу. Элементарная работа
рис.4 a – угол между направлениями
Скорость совершения работы определяется физической величиной, называемой мощностью
Так как
Сила, работа которой не зависит от формы траектории движения тела, называется консервативной. А поле действия таких сил – потенциальным.Например, сила тяжести, сила упругости являются консервативными силами. Если работа, совершаемая силой, зависит от траектории движения тела, то такая сила называется диссипативной. Сила трения является диссипативной силой. Система тел (частиц), между которыми действуют только консервативные силы, называется консервативной. Для консервативной системы тел полная механическая энергия сохраняется со временем, при этом один вид механической энергии переходит в другой вид (например, кинетическая в потенциальную) и носит название закона сохранения энергии в механике
Механика твердого тела В динамике вращательного движения твердого тела пользуются понятиями момента инерции
Моментом инерции тела относительно данной оси называется физическая величина, равная сумме произведений масс элементарных частей тела (точек) на квадрат их расстояний до этой оси
В случае непрерывного распределения масс сумма заменяется интегралом
Применяя эти формулы, можно вычислить моменты инерции для некоторых тел, которые приведены ниже в таблице. Если задана ось вращения, которая не проходит через центр инерции, то момент инерции относительно этой оси можно определить на основе теоремы Штейнера a – расстояние между осями.
При вращательном движении момент инерции есть мера инертности тела. Моментом силы
Направление момента силы определяется правилом правого винта.
рис.5 Момент импульса материальной точки относительно неподвижной точки О называется физическая величина, определяемая векторным произведением
где Модуль момента импульса
Направление момента импульса определяется по правилу правого винта. Момент импульса твердого тела относительно оси
где Основной закон вращательного движения: Если момент внешних сил, действующих на тело, равен нулю ( Кинетическая энергия вращающегося тела равна
Изменение кинетической энергии тела определяется работой, совершаемой силой

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|
 или в векторной форме
или в векторной форме  ,
, – ее радиус-вектор (рис. 1).
– ее радиус-вектор (рис. 1).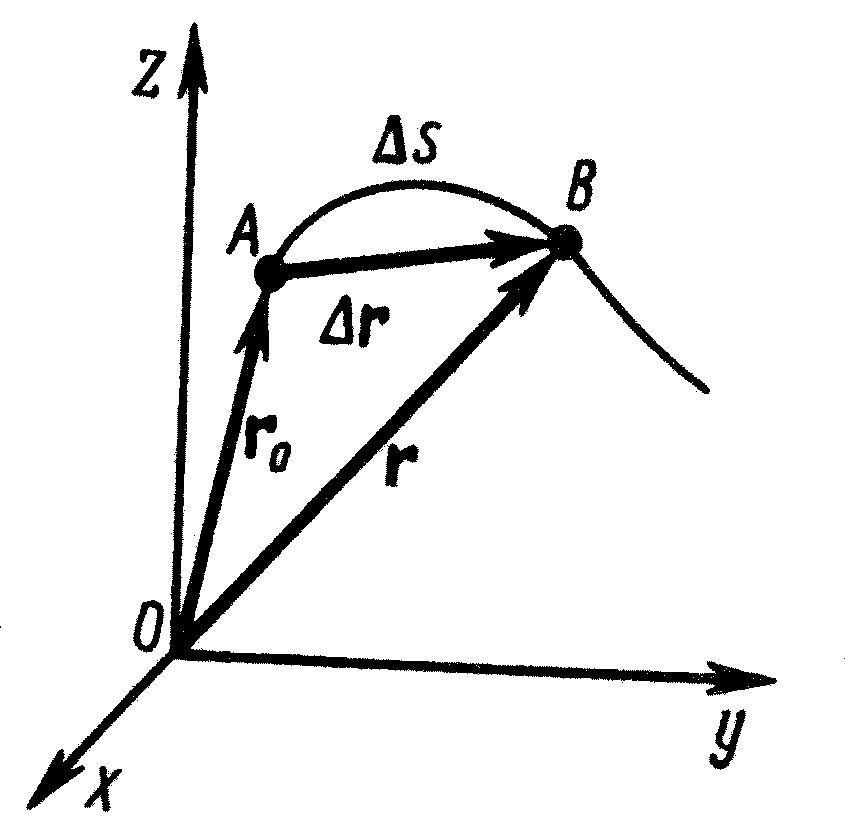
 – перемещение из положения 1 в положение 2.
– перемещение из положения 1 в положение 2. . Модуль мгновенной скорости равен первой производной пути по времени:
. Модуль мгновенной скорости равен первой производной пути по времени: 
 :
:  .
.
 :
:  , где
, где  – изменение скорости за
– изменение скорости за  .
. (рис. 2)
(рис. 2)

 , где R – радиус кривизны (если материальная точка движется по окружности, то R – радиус окружности).
, где R – радиус кривизны (если материальная точка движется по окружности, то R – радиус окружности). ,
,  и путь
и путь 
 ,
,  , где
, где  – скорость тела в момент времени
– скорость тела в момент времени  ; а>0, если тело движется равноускоренно, и а<0 при равнозамедленном движении тела.
; а>0, если тело движется равноускоренно, и а<0 при равнозамедленном движении тела. , нормальное -
, нормальное -  .
. и угловым ускорением
и угловым ускорением  .
. .
.

 ,
, – при действии нескольких сил.
– при действии нескольких сил. называется импульсом или количеством движения материальной точки.
называется импульсом или количеством движения материальной точки.
 . Направлены силы вдоль линии, проходящей через материальные точки.
. Направлены силы вдоль линии, проходящей через материальные точки.

 – масса и радиус-вектор
– масса и радиус-вектор  – ой точки материальной точки системы; m – масса системы.
– ой точки материальной точки системы; m – масса системы.



 – результирующая внешних сил;
– результирующая внешних сил; – реактивная сила, здесь
– реактивная сила, здесь  – скорость истечения газов относительно ракеты.
– скорость истечения газов относительно ракеты.
 , движущейся со скоростью
, движущейся со скоростью  , определяется формулой
, определяется формулой
 – потенциальная энергия тела, поднятого
– потенциальная энергия тела, поднятого – потенциальная энергия упруго деформированного тела,
– потенциальная энергия упруго деформированного тела,  – коэффициент жесткости пружины (коэффициент упругости).
– коэффициент жесткости пружины (коэффициент упругости). , совершаемая силой
, совершаемая силой  на элементарном перемещении
на элементарном перемещении  тела равна скалярному произведению силы на перемещение.
тела равна скалярному произведению силы на перемещение.

 (рис.4). Полная работа, совершаемая силой
(рис.4). Полная работа, совершаемая силой  на участке траектории от точки 1 до точки 2.
на участке траектории от точки 1 до точки 2.

 , то мощность можно представить в виде скалярного произведения силы на скорость точки.
, то мощность можно представить в виде скалярного произведения силы на скорость точки.

 , момента силы
, момента силы  и момента импульса
и момента импульса  . Момент инерции материальной точки относительно некоторой оси есть скалярная величина, равная произведению массы точки на квадрат расстояния от нее до оси вращения.
. Момент инерции материальной точки относительно некоторой оси есть скалярная величина, равная произведению массы точки на квадрат расстояния от нее до оси вращения.



 – момент инерции тела относительно оси, проходящей через центр масс;
– момент инерции тела относительно оси, проходящей через центр масс; – момент инерции тела относительно произвольной оси равен моменту инерции его относительно оси, проходящей через центр тела и параллельно произвольной оси
– момент инерции тела относительно произвольной оси равен моменту инерции его относительно оси, проходящей через центр тела и параллельно произвольной оси  плюс произведение массы тела на квадрат расстояния между осями.
плюс произведение массы тела на квадрат расстояния между осями. mR2
mR2
 ml2
ml2
 ml2
ml2
 mR2
mR2
 относительно неподвижной точки О называется физическая величина, определяемая векторным произведением радиуса – вектора
относительно неподвижной точки О называется физическая величина, определяемая векторным произведением радиуса – вектора  , проведенного из точки О в точку приложения силы, на силу
, проведенного из точки О в точку приложения силы, на силу  ,
,
 – угол между направлениями
– угол между направлениями  – плечо силы.
– плечо силы.


 – угол между направлениями
– угол между направлениями 
 – плечо импульса
– плечо импульса  относительно точки О.
относительно точки О. равен
равен
 – расстояние от оси
– расстояние от оси  до отдельной частицы тела;
до отдельной частицы тела;  – импульс этой частицы;
– импульс этой частицы;  – момент инерции тела относительно оси
– момент инерции тела относительно оси  ;
;  – его угловая скорость.
– его угловая скорость.
 ), то
), то  . Это выражение является законом сохранения момента импульса.
. Это выражение является законом сохранения момента импульса.
 , которая равна произведению момента силы на угловой путь:
, которая равна произведению момента силы на угловой путь: