
|
|
Равновесие тела при наличии трения качения
Откуда
С увеличением
Способы задания движения точки Движение точки можно задать одним из следующих трех способов: 1) векторный; 2) координатный; 3) естественный. Векторный способ задания движения точки
Уравнение (6.2) называется кинематическим уравнением движения точки в векторной форме.
Геометрическое место концов переменного вектора называется годографом. Следовательно, траектория точки М является годографом радиус-вектора Координатный способ задания движения точки Движение точки может быть задано в: 1) декартовых координатах; 2) цилиндрических координатах; 3) сферических координатах; 4) полярных координатах. Задание движения точки в декартовых координатах
Уравнение (6.3) называется кинематическими уравнениями движения точки в параметрической форме. Исключая из уравнений (6.3) параметр t, получаем уравнение траектории в явной форме. Формула, связывающая векторный и координатный способы задания движения точки:
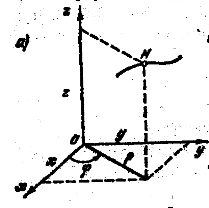
Задание движения точки в цилиндрических координатах
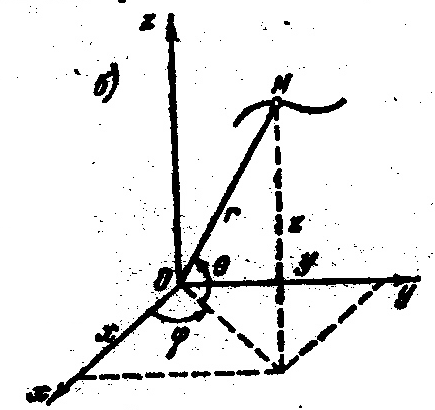
ρ-радиус, φ-азимут, z-аппликата Задание движения точки в сферических координатах
где r - радиус, φ – полюсный угол. Связь цилиндрических и сферических координат с декартовыми:
Задание движения точки в полярных координатах
Формулы связывающие полярные координаты с декартовыми:
Естественный способ задания движения точки
Для задания движение точки естественным способом, необходимо знать: 1) траекторию точки; 2) начало отсчета на траектории с указанием положительного и отрицательного направлений отсчета; 3) закон движения точки вдоль траектории в виде (6.9).
Скорость движения точки в различных системах координат Скорость движения точки
где
Вектор скорости точки равен первой производной по времени от радиуса-вектора точки. Вектор скорости Скорость точки в декартовой системе координат
По определению Тогда
Следовательно
Проекции скорости на оси декартовой системы координат равны первым производным по времени от соответствующих координат точки.
Скорость точки в полярных координатах
Скорость точки в естественных координатах
Обозначим где
Проекция вектора скорости на направление орта касательной равна первой производной по времени от дуговой координаты.
Ускорения движения точки в различных системах координат
Следовательно Вектор ускорения точки в данный момент времени равен первой производной от вектора скорости или второй производной от радиус-вектора точки по времени. Ускорение точки в декартовой системе координат Пусть движение точки задано координатным способом:
По определению Тогда Следовательно
Ускорение точки в полярных координатах
С другой стороны
тогда

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|


 - момент трения качения
- момент трения качения


 растет расстояние h и может нарушиться равновесие
растет расстояние h и может нарушиться равновесие
 - коэффициент трения качения
- коэффициент трения качения или
или 
 (6,2)
(6,2) - является однозначной, непрерывной и дважды дифференцируемая функция.
- является однозначной, непрерывной и дважды дифференцируемая функция.
 (6.3)
(6.3)






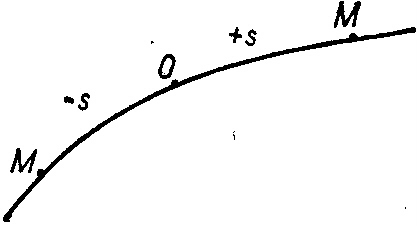 Естественным способом задания движения точки удобно пользоваться, когда траектория точки известна заранее.
Естественным способом задания движения точки удобно пользоваться, когда траектория точки известна заранее.  (6.9)
(6.9)



 - вектор перемещения точки.
- вектор перемещения точки.





 следовательно
следовательно 
 направлен по касательной к траектории точки.
направлен по касательной к траектории точки.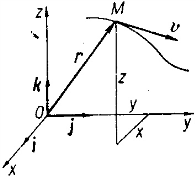 Пусть движение точки задано координатным способом:
Пусть движение точки задано координатным способом: тогда
тогда 






 Пусть движение точки в плоскости Оху задано в полярных коодинатах:
Пусть движение точки в плоскости Оху задано в полярных коодинатах: тогда
тогда 

 - проекция скорости на радиальное направление r
- проекция скорости на радиальное направление r - проекция скорости на трансверсальное направление j
- проекция скорости на трансверсальное направление j
 Пусть движение точки задано естественным способом:
Пусть движение точки задано естественным способом:
 или
или

 - единичный вектор, направленный по касательной к траектории. Тогда
- единичный вектор, направленный по касательной к траектории. Тогда 

 Физическая величина, характеризующая быстроту изменения во времени скорости движения точки, называется ускорением.
Физическая величина, характеризующая быстроту изменения во времени скорости движения точки, называется ускорением.


 или
или 
 тогда
тогда 
 Продифференцируем
Продифференцируем 


 Проекции ускорения на оси декартовой системы координат равны первым производным по времени от соответствующих проекций скорости на те же оси или вторым производным по времени от соответствующих координат движущейся точки.
Проекции ускорения на оси декартовой системы координат равны первым производным по времени от соответствующих проекций скорости на те же оси или вторым производным по времени от соответствующих координат движущейся точки.
 Пусть движение точки М в плоскости Оху задано в полярных координатах:
Пусть движение точки М в плоскости Оху задано в полярных координатах: тогда
тогда Из рис. видно, что
Из рис. видно, что




