
|
|
Частотное регулирование скорости АД по цепи статора
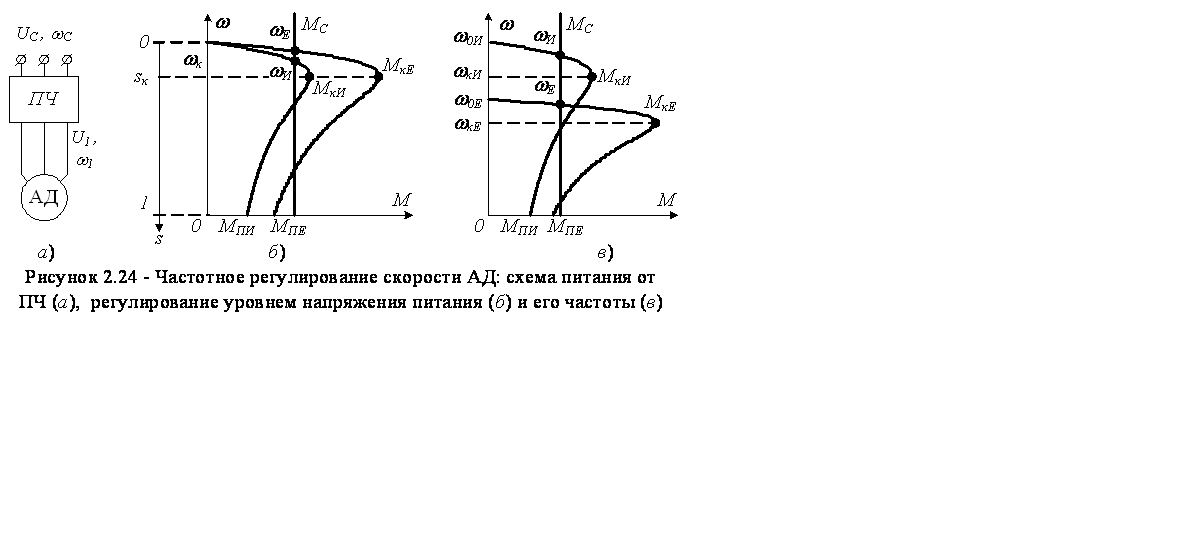
Схема частотного регулирования приведена на рис. 2.24, а. В схему входит преобразователь частоты (ПЧ), К ПЧ подведено сетевое напряжения с уровнем UC и частотой fC. На выходе ПЧ формируется синусоидальной напряжение с произвольным уровнем U1 и частотой f1. Возможно раздельное регулирование уровня напряжения U1 и его частоты f1. Все параметры и характеристики АД, полученные при номинальных значениях уровня напряжения U1ном и его частоты f1ном называются естественными и они снабжаются в обозначениях индексом "Е". Если уровень напряжения U1 или его частота f1 отличаются от номинальных, то все параметры и характеристики АД называются искусственными и они снабжаются в обозначениях индексом "И". При анализе схем регулирования частоты с помощью ПЧ необходимо использовать следующие выражения: 1) формулу частоты вращения поля статора (2.15) 2) формулу критического скольжения (2.32) 3) формулу критического момента (2.33) 4) формулу пускового тока (2.27) 5) формулу пускового момента (2.34)
1. Регулирование частоты снижением уровня U1 при f1=const. Синхронная частота ω0 и критическое скольжение sк не изменятся, так как они не зависят от U1. Пусковой ток IП уменьшится пропорционально уменьшению U1 а критический Мк и пусковой МП моменты уменьшатся в большей степени, так как пропорциональны Для установления факта регулирования частоты вращения АД нанесем график момента сопротивления нагрузки МС. Точками пересечения графиков МХ АД и МХ нагрузки определяются частоты вращения АД. Видно, что этим способом можно регулировать частоту вращения в небольших пределах от ω0 до ωк, что составляет всего (15...20)% от всего диапазона скоростей АД. Кроме того, снижается запас устойчивости работы АД, так как критический момент Мк резко снижается. Из-за этих серьезных недостатков рассмотренный способ регулирования частоты практически не применяется. 2. Регулирование скорости АД повышением частоты f1 при U1=const. Синхронная частота ω0 увеличивается, а все остальные параметры МХ и ЭМХ АД уменьшаются, причем наиболее интенсивно понижаются критический Мк и пусковой МП моменты, менее интенсивно – пусковой ток IП (рис.2.26,в).При наложении графика МХ нагрузки на графики МХ АД обнаруживается повышение частоты вращения АД. Рассмотренный способ регулирования частоты применяется редко, так у АД допускается небольшое (до 50%) увеличение частоты вращения сверх синхронной. 3. Регулирование скорости АД одновременным изменением вверх или вниз уровня напряжения U1 и его частоты f1. В зависимости от вида МХ нагрузки различают разные законы одновременных изменений уровня напряжения U1 и его частоты f1. 3.1. Уровень напряжения U1 и его частота f1 изменяются пропорционально друг другу: U1/f1=const. Такой закон регулирования называется линейным частотным законом (рис.2.25,а).
Способ регулирования частот вращения имеет следующие достоинства: - частоту вращения ω можно регулировать в диапазоне 0...150%; - критический момент Мк неизменен и перегрузочная способность АД остается всегда на высочайшем уровне; - пусковой момент МП повышается, что позволяет плавно разгонять АД под нагрузкой путем плавного изменения частоты ω1; - пусковой ток IП уменьшается, а при плавном пуске и разгоне АД он остается постоянно малым, и ПЧ никогда из сети не будет потреблять ток в 5...7 крат номинального (фактически в используемых в электроприводе ПЧ пусковой ток ограничен уровнем не более 1,5·Iном). Рассмотренный способ регулирования целесообразно использовать в электроприводе с постоянным моментом сопротивления нагрузки – MC=const. 3.2. Уровень напряжения U1 прямо пропорционален квадрату частоты f1: - перегрузочная способность АД в электроприводе остается неизменной; - снижение тока I1 и в том числе - пускового IП глубже, чем при линейном частотном законе регулирования, а это снижает потери мощности в АД и повышает его к.п.д. Иные способы управления скоростью АД с короткозамкнутым ротором, кроме частотного, не применяются. Несмотря на дороговизну ПЧ, рассмотренные схемы регулирования частоты вращения АД получили самое широкое распространение потому, что в электроприводе используется самый дешевый, надежный, имеющий большой срок службы (до 20 лет) АД с короткозамкнутым ротором. Вопросы и задания 1. Какие законы регулирования скорости АД реализуются при частотном управлении? 2. Поясните способ регулирование частоты АД изменением напряжением питания. 3. Поясните способ регулирование частоты АД изменением частоты напряжения питания. 4. Поясните способ регулирование частоты АД одновременным изменением уровня напряжения питания и его частоты. 
Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|
 ;
; ;
; ;
; ;
; .
.
 (рис.2.24,б).
(рис.2.24,б). Рассмотрим, для определенности, вариант снижения уровня напряжения U1 и его частоты f1. Синхронная частота ω0 уменьшается, а критический момент Мк остается неизменным, так как он пропорционален отношению U1/f1, а это отношение постоянно. Пусковой ток IП уменьшится пропорционально понижению U1, а одновременное уменьшение ω1 практически не изменяет ток IП, так как ω1 входит неполно (в качестве одного из слагаемых суммы RK+jω1LK) в знаменатель только второй дроби формулы (2.27). Пусковой момент МП увеличивается, что доказывается расчетом:
Рассмотрим, для определенности, вариант снижения уровня напряжения U1 и его частоты f1. Синхронная частота ω0 уменьшается, а критический момент Мк остается неизменным, так как он пропорционален отношению U1/f1, а это отношение постоянно. Пусковой ток IП уменьшится пропорционально понижению U1, а одновременное уменьшение ω1 практически не изменяет ток IП, так как ω1 входит неполно (в качестве одного из слагаемых суммы RK+jω1LK) в знаменатель только второй дроби формулы (2.27). Пусковой момент МП увеличивается, что доказывается расчетом: (2.50)
(2.50) , где с=const. Такой закон регулирования называется параболическим частотным законом (рис. 2.25, а). Его применение целесообразно для привода механизмов имеющих параболическую МХ (вентиляторы, центробежные насосы и т.п.). При таком способе напряжение U1 понижается быстрее понижения частоты ω1. В результате:
, где с=const. Такой закон регулирования называется параболическим частотным законом (рис. 2.25, а). Его применение целесообразно для привода механизмов имеющих параболическую МХ (вентиляторы, центробежные насосы и т.п.). При таком способе напряжение U1 понижается быстрее понижения частоты ω1. В результате: