|
|
МАШИНЫ ДЛЯ УБОРКИ ПЛОДОВ И ЯГОД
Прицеп-контейнеровоз ПК-4предназначен для вывоза из сада фруктов, затаренных в контейнеры КСП-0,5 или ящики на поддонах, а также для подвозки и расстановки порожних контейнеров и ящиков.
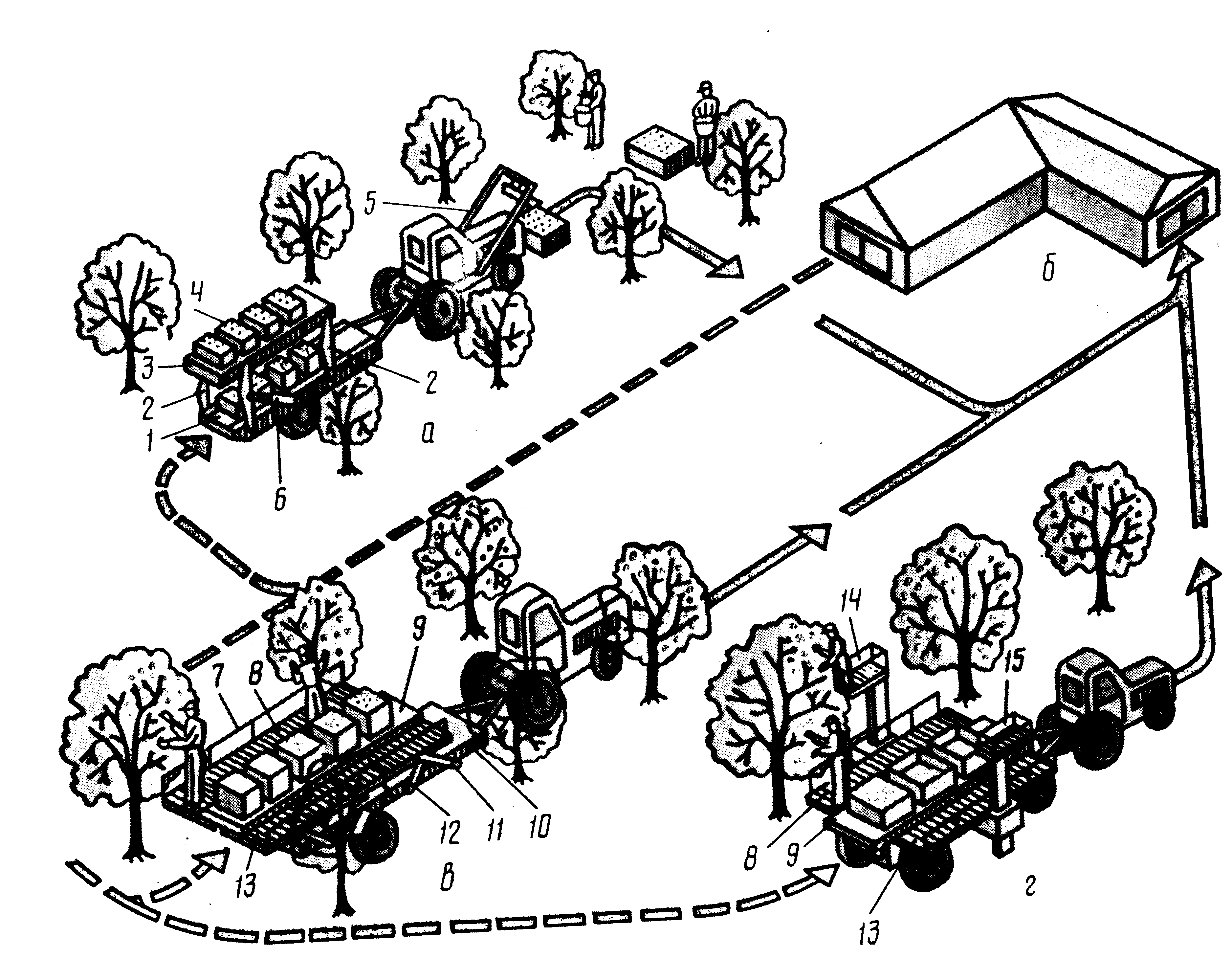
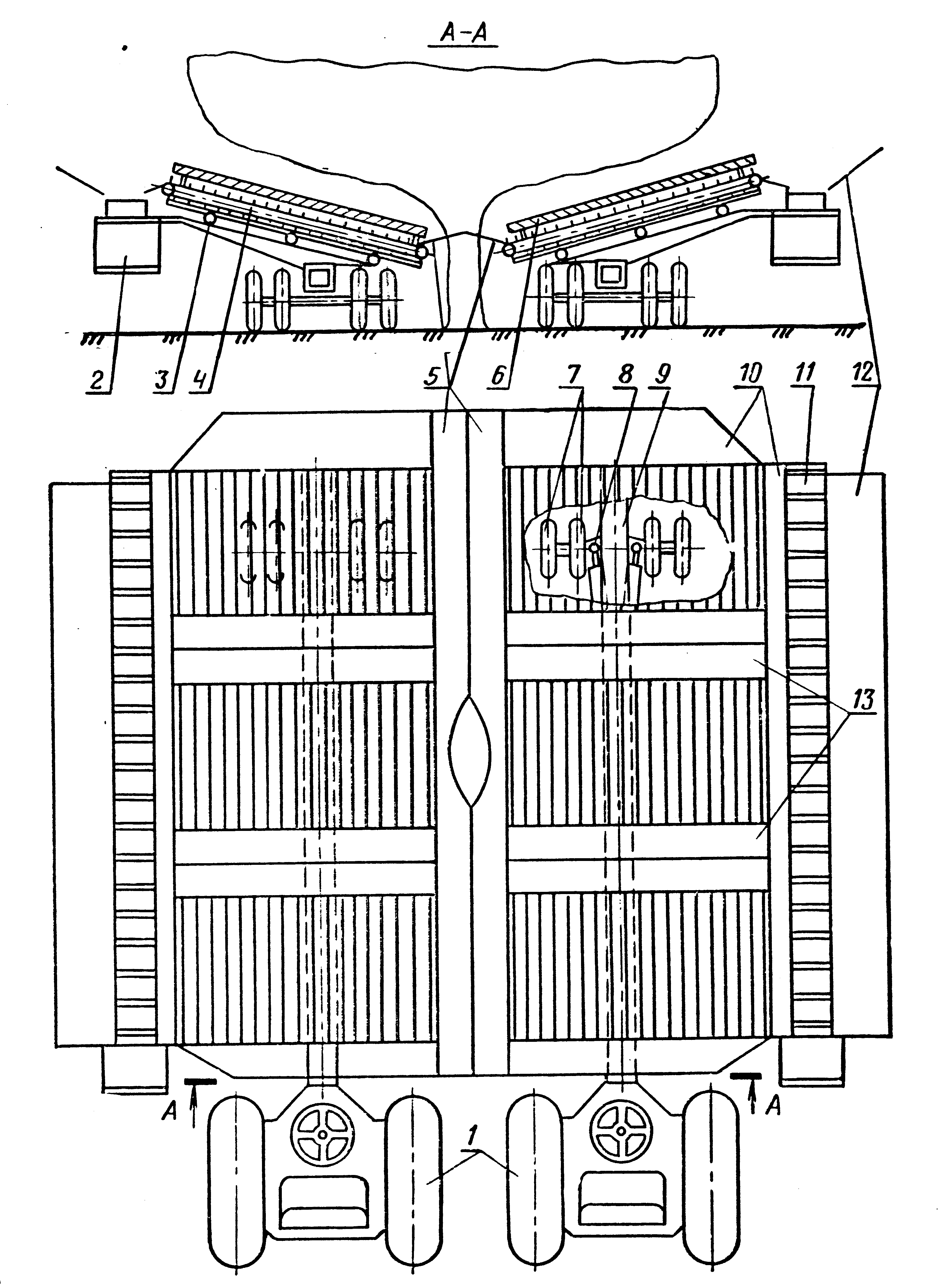
Рисунок 105 – Комплекс машин для поточной уборки плодов в садах: а – прицеп-контейнеровоз ПК-4; б – пункт сортировки и переработки плодов; в – уборочно-обрезочная платформа ПОС-О,5; г – уборочно-обрезочная платформа ПКО-О,75; 1, 3 и 9 – платформы; 2 и 11 – стойки; 4 – контейнеры КПС-О,5; 5 – портальный погрузчик ППК-О,5; 6 и 12 – гидроцилиндры; 7 – ограждение; 8 и 13 – выдвижные трапы; 10 – рама; 14 и 15 – корзины
Прицеп-контейнеровоз состоит из нижней 1 (рис. 105а) и верхней 3 платформ. Верхняя платформа установлена на четырех шарнирно связанных с рамой стойках 2, обеспечивающих посредством гидроцилиндров 6 параллельный подъем или опускание ее при загрузке или разгрузке. К задней части нижней платформы прикреплена аппарель, поднимаемая и опускаемая гидроцилиндром. На нижней платформе и аппарели установлен цепной транспортер. Если при этом используют портальный загрузчик, то контейнеры загружают на переднюю часть прицепа-контейнеровоза. Выгружают контейнеры в обратной последовательности. Многоместная платформа ПОС-0,5 применяется для ручного съема плодов, а также для подрезки и подвязки ветвей в пальметтных садах с шириной междурядий 3,5-5 м и высотой кроны до 4,5 м. Платформа 9 (рис. 105в) выполнена как дополнительное оборудование, устанавливаемое на раму 10 прицепа-контейнеровоза ПК-4. Платформа оснащена двумя выдвижными трапами 8 и 13 с ограждением 7 для безопасности рабочих-сборщиков; механизмом подъема и опускания, состоящим из четырех стоек 11 и двух гидроцилиндров 12; лестницей для подъема и спуска сборщиков. Перед началом сбора плодов порожние контейнеры помещают на верхнюю платформу и поднимают ее. Затем контейнеры устанавливают на нижнюю платформу. После этого платформа при помощи трактора въезжает между рядами деревьев. При сборе плодов сборщики, находящиеся на трапах, снимают плоды с верхних ярусов деревьев на высоте 2-4,5 м в плодосборные сумки. Наполненные сумки выгружают в контейнеры. Плоды с нижних ярусов на высоте до 2 м сборщики собирают также в плодосборные сумки, содержимое из которых выгружают в контейнеры нижней платформы. После сбора плодов в зоне платформы трапы сдвигают, а платформу перемещают на новую позицию. При сборе плодов трапы раздвигают по мере углубления сборщиков в крону деревьев. После заполнения контейнеров сборщики покидают платформу. В зависимости от организации работ контейнеры можно выгружать в саду или перевозить к месту хранения. Многоместная платформа ПКО-0,75 предназначена для сбора плодов семечковых культур в садах с объемными кронами высотой от 2 до 6 м с междурядьями от 6 до 8 м, расположенными на равнинах и склонах до 5°. Платформа агрегатируется с колесным трактором. Она смонтирована на базе двухосного тракторного прицепа 2-ПТС-4 и состоит из площадки (рис. 105г) с выдвижными трапами 8 и 13, оборудованными ограждениями 7; двух корзин 14 и 15 с устройством для регулировки их по высоте; рольганга для перемещения контейнеров и аппарели при подъеме и опускании контейнеров с платформы. Вибрационная плодоуборочная машина ВУМ-15А используется для механизированного съема и сбора косточковых и семечковых плодов на техническую переработку в садах с кроной до 4 м, диаметром штамба деревьев до 150 мм, расположенных на равнинах и склонах до 10°.
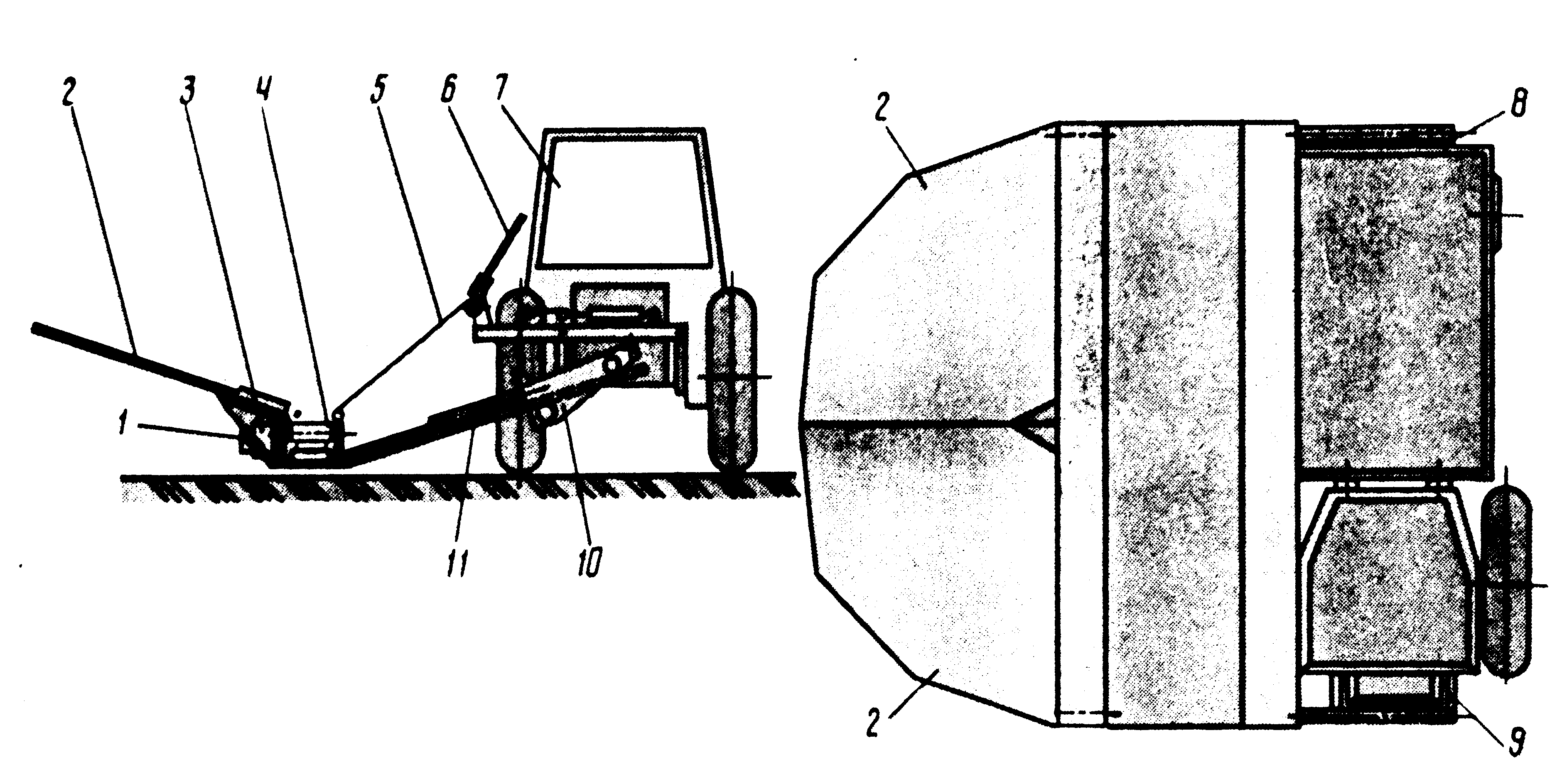
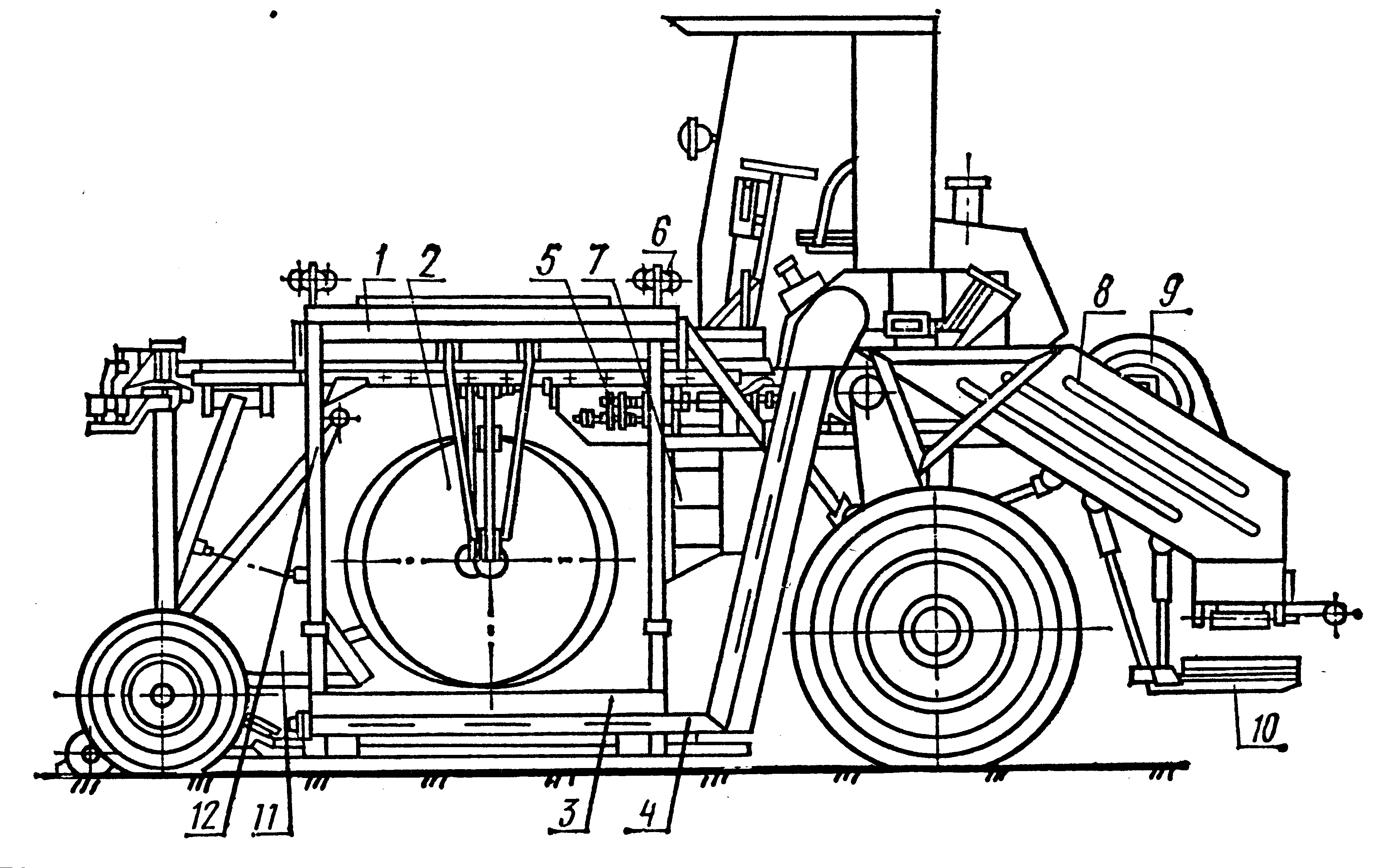
Рисунок 106 – Плодоуборочная машина ВУМ-15А: 1 и 11 – гидроцилиндры; 2 – навесная часть улавливателя; З – вибратор; 4 – транспортер; 5 – наматывающая часть улавливателя; 6 – экран; 7 – самоходные шасси; 8 и 9 передняя и задняя рамы; 10 – блок роликов Машина состоит из передней 8 (рис. 106) и задней 9 рам, транспортера 4, вибратора 3, улавливателя, привода, механизма корректировки по высоте вибратора с транспортером и системы очистки плодов от примесей. Передняя и задняя рамы (8 и 9) связаны с самоходным шасси и служат для навески транспортера, направляющие которого перемещаются в блоках 10 роликов. При изменении положения блока роликов обеспечивают требуемую высоту установки транспортера с вибратором. Улавливатель предназначен для приема падающих плодов и подачи их на транспортер. Он оборудован экраном 6, навесной частью 2 и наматывающей частью 5. Экран 6 жестко закреплен на машине. Навесная часть улавливателя образована двумя частями, шарнирно закрепленными на левой стороне транспортера. Раскрывают и закрывают части навесного улавливателя гидроцилиндрами. Наматывающая часть 5 улавливателя снабжена барабаном и полотном. Один конец полотна прикреплен к барабану, а другой – к правой стороне транспортера. Поверхности всех частей 2, 5 и 6 улавливателя изготовлены из мелиоративной ткани. Транспортер перемещает плоды к месту затаривания. Он выполнен из бесконечной ленты, одетой на два вращающихся барабана. На раме транспортера установлен вентилятор для очистки плодов от легких примесей. Технологический процесс происходит следующим образом. Машину направляют в междурядье сада и останавливают ее так, чтобы штамб дерева находился против зоны действия захватов стряхивателя-вибратора. Машину переводят в рабочее положение выдвижением транспортера со встряхивателем-вибратором до упора в штамб дерева. После этого устанавливают встряхиватель-вибратор на необходимую высоту и захватывают штамб. Далее закрывают части навесного улавливателя, гидроцилиндром 1 устанавливают его на нужный угол наклона и включают транспортер с вентилятором и вибратор. Плоды стряхивают с несколько приемов по 2-3 с. При этом частоту вращения коленчатого вала двигателя (колебания вибратора) постепенно увеличивают до максимальной. Плоды, падая на улавливатель, скатываются по нему на транспортер и перемещаются им в тару. В момент схода с транспортера поток плодов продувается воздухом, создаваемым вентилятором, и очищается от легких примесей. После окончания съема плодов с дерева отключают стряхиватель-вибратор, открывают навесной улавливатель, освобождают штамб дерева, выключают транспортер и переводят его в транспортное положение. Затем машина перемещается к следующему дереву, и цикл повторяется. Машина навешивается на самоходное шасси Т-16М. Производительность – 50-60 деревьев в 1 час. Плодоуборочный комбайн КПУ-2 является вибрационной плодоуборочной машиной и предназначен для механизированного съема косточковых и семечковых плодов деревьев с кроной до 7 м с шириной междурядий 6 м и расстоянием между деревьями в ряду не менее 4 м. Комбайн состоит из двух самоходных левого 1 и правого 2 агрегатов (рис. 107), смонтированных на базе самоходного шасси Т-16М. На правом агрегате 2 установлен вибратор 4 посредством упругой подвески 5, исключающей передачу вибрации на агрегат. Улавливающая поверхность правого агрегата образована несколькими щитами, покрытыми амортизирующим материалом. Улавливающая поверхность левого агрегата 1 включает в себя три наклонных поперечных транспортера 8 и один продольный транспортер 7, которым плоды выносятся с машины к месту затаривания в контейнеры или ящики, устанавливаемые на площадках 3 или 6.
Рисунок 107 – Плодоуборочный комбайн КПУ-2: 1 и 2 – левый и правый агрегаты; 3 – площадка порожних контейнеров; 4 – вибратор; 5 – упругая подвеска; 6 – площадка порожних ящиков; 7 и 8 – продольный и поперечный транспортеры
Комбайн оборудован системой очистки плодов от листьев и легких примесей. Она выполнена в виде разделительного транспортера, являющегося продолжением продольного транспортера. Разделительный транспортер представляет собой бесконечную ленту из грубого материала, которая движется навстречу потоку плодов, захватывает листья и примеси и выносит их под комбайн, а плоды скатываются в тару. Наклон разделительного транспортера регулируют в пределах 15-30о. Вибратор колеблется с частотой 16-20 Гц при амплитуде 16-22 мм. Привод рабочих органов комбайна гидравлический. Технологический процесс работы комбайна происходит следующим образом. Оба агрегата устанавливают в соседних междурядьях так, чтобы середина улавливателя совпала со штамбом дерева. Стряхиватели-вибраторы 4 захватывают штамб. Улавливатели обоих агрегатов при помощи гидроцилиндров сближают под деревом таким образом, чтобы штамб дерева совпал с меткой на его уплотнителе. Поверхность улавливателей устанавливают под углом 12° к горизонту. Затем включают транспортеры и вибратор. Длительность цикла вибрации – 3-7 с. В результате встряски дерева плоды обрываются и падают на улавливатель, с него поперечными, а затем продольными транспортерами передаются на разделительный транспортер. С последнего плоды по лотку направляются в тару. Производительность комбайна – 35-45 деревьев в 1 час. Плодоуборочная самоходная машина ПСМ-55 предназначена для уборки плодов семечковых и косточковых культур с кроной диаметром до 7,5 м, посаженных с междурядьем 6-10 м. Машина (рис. 108) состоит из двух самоходных секций (левой в правой) и встряхивающего устройства. Секции улавливают плоды и транспортируют их для загрузки в тару. Каждая секция включает центральный брус 9, скатные козырьки 10 и 12, продольный транспортер 11, поперечные транспортеры 4, ленточный амортизатор 6 и загрузчик контейнеров 2. Рамы поперечных транспортеров установлены на ролики 3 для перемещения их к центру штамба. Каждую секцию навешивают на самоходное шасси. При сборе плодов промежуток между секциями перекрывают откидными щитками 5. Секции вначале устанавливают так, чтобы штамб дерева находился в месте вырезов у откидных щитков 5, а затем их сдвигают к штамбу до смыкания. Включают транспортеры улавливателя и встряхиватели ВСО-25. Оторвавшиеся плоды падают на ленты амортизатора 6, с них попадают на поперечные транспортеры 4, затем на продольные транспортеры 11 и далее в контейнеры.
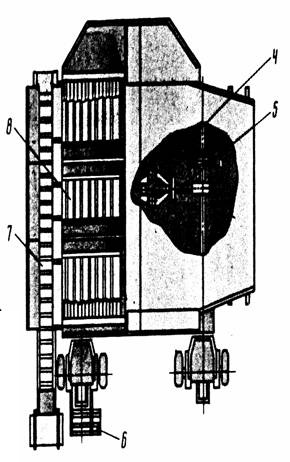
Рисунок 108 – Схема самоходной плодоуборочной машины ПСМ-55: 1 – самоходное шасси; 2 – загрузчик контейнеров; 3 – ролики; 4 – поперечные транспортеры; 5 – откидные щитки; 6 – ленточный амортизатор; 7 – передний мост с управляемыми колесами; 8 – гидроцилиндр; 9 – центральный брус; 10 и 12 – скатные козырьки; 11 – продольный транспортер; 13 – двухскатные козырьки Ягодоуборочная машина ЭЯМ-200-8 прерывистого действия предназначена для сбора ягод смородины и крыжовника. Основные рабочие органы: две штанги 1 (рис. 109) с четырьмя подвесными ручными электровибраторами 6, улавливатели 7, бункер 5 с решеткой для отделения крупных примесей от ягод, рама 10 с площадкой, на которой установлен генератор 4, вентилятор 8, блок аппаратуры 2 и понижающий трансформатор 3. Машина собирает ягоды одновременно с четырех рядов. При сборе улавливатель устанавливают так, чтобы полукольцевой вырез днища охватывал основание куста. Сборщики одной рукой захватывают две-три ветви и отклоняют их в сторону улавливателей, а другой рукой вводят вилку работающего вибратора в пучок ветвей, перемещая его по всей их длине. Оторванные ягоды попадают в улавливатели. Заполненный улавливатель разгружают в бункер.
Рисунок 109 – Ягодоуборочная машина ЭЯМ-200-8: 1 – штанга; 2 – блок аппаратуры; 3 – понижающий трансформатор; 4 – генератор; 5 – бункер; 6 – электровибраторы; 7 – улавливатель; 8 – вентилятор; 9 – клиноременные передачи; 10 – рама По окончании уборки агрегат переводят на новое место. В бункере отделяются крупные примеси. После этого частично очищенные ягоды равномерно подаются в зону действия воздушного потока, создаваемого вентилятором. Скорость и направление воздушного потока регулируют заслонкой, установленной на щели в днище бункера. Машина агрегатируется с трактором класса 3 и рассчитана на сбор ягод с плантации площадью 10-15 га. Ягодоуборочная машина МПЯ-1А непрерывного действия предназначена для сбора ягод смородины, крыжовника и черноплодной рябины с междурядьями 2,5-3 м и расстоянием между кустами 0,6-1,0 м. Машина оборудована формирователем, активатором, улавливателем, поперечным и продольным транспортерами, вентилятором, кассетами для ящиков и подъемным устройством. Навешивают машину на самоходное шасси. При работе машины формирователи поднимают ветви ягодников, придают им удобную для стряхивания форму. В зоне действия активатора куст располагается над поперечным транспортером, который является и улавливающей поверхностью. С поперечных транспортеров ягоды передаются на продольные, перемещаются ими, очищаются воздухом от листьев и легких примесей и укладываются в ящики. Заполненные ящики устанавливают в кассеты и заменяют порожними. Производительность машины – 1,4 т/ч. Машина имеет активатор 2 (рис. 110), поперечный 3 и продольный 4 транспортеры, вентилятор 9, формирователи 11, бункер 8, разгрузочное устройство 10, подъемное устройство 6 и привод 5.
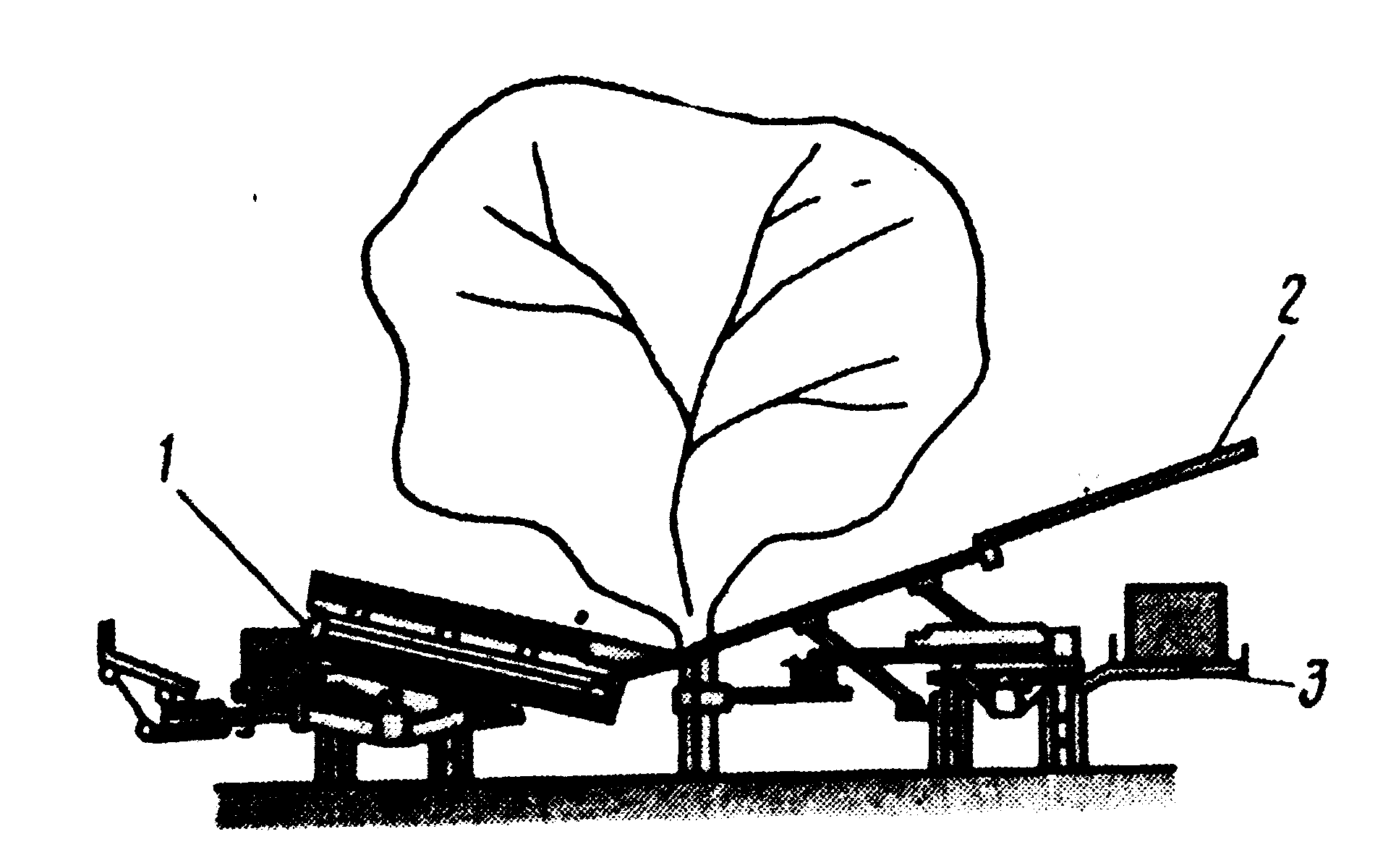
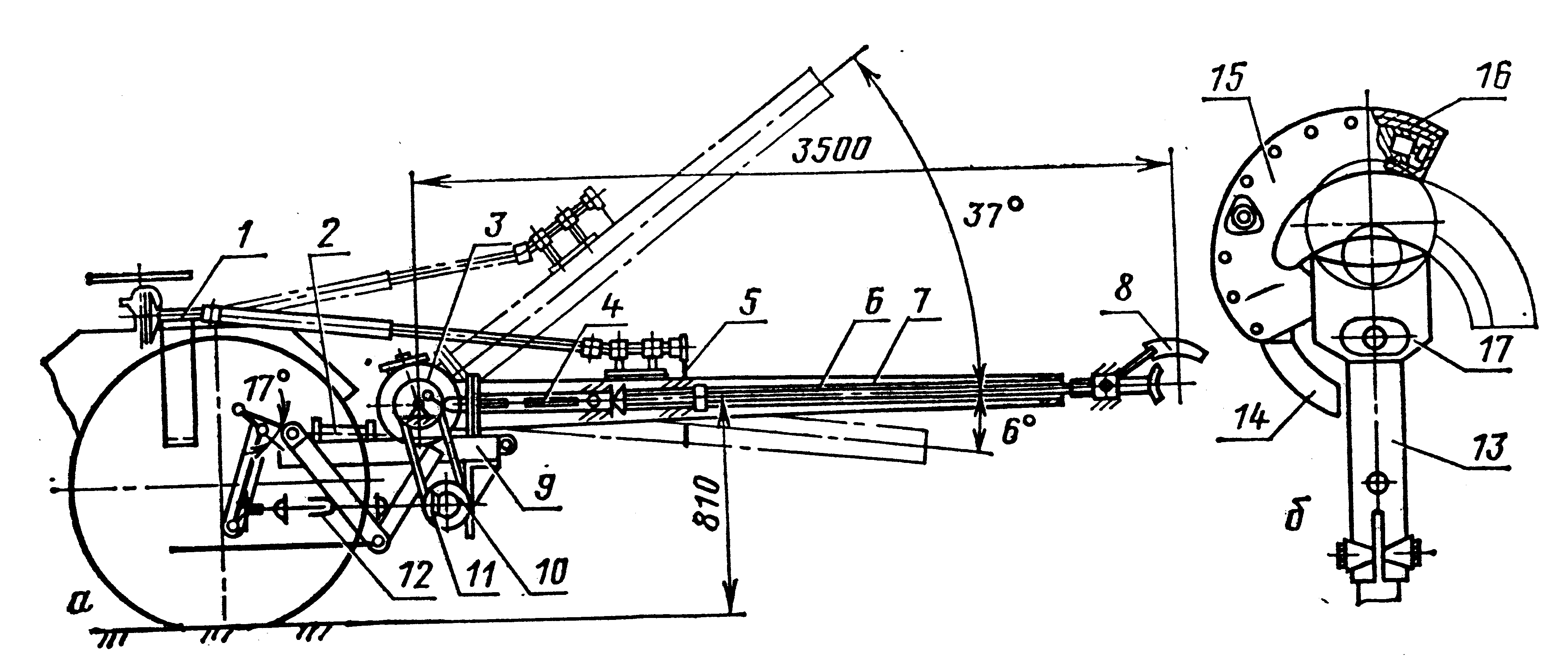
Рисунок 110 – Схема ягодоуборочной машины МПЯ-1: 1 – рама; 2 – активатор; 3 – поперечный транспортер; 4 – продольный транспортер; 5 – центральный привод; 6 – подъемное устройство; 7 – лестница; 8 – бункер; 9 – вентилятор; 10 – разгрузчик; 11 – формирователь; 12 – ограждение Активатор 2 возбуждает колебания, отделяет ягоды от ветвей, а при непрерывном движении машины одновременно прочесывает кроны кустарников за счет свободного вращения пальчатых дисков на штоке. Улавливатель выполнен в виде бесконечной цепи с резиновыми лотками, внедряющимися в основание куста и перекрывающими межкустовую зону. Лотки принимают ягоды, отводят их на поперечные транспортеры с резиновыми скребками. Формирователь предназначен для ориентации кустов по ходу движения машины и обеспечивает эффективную работу активатора. При работе машину ориентируют так, чтобы ветви попадали в зону действия активатора. Опадающие ягоды вместе с листьями и другими примесями падают на лотки улавливателя и поперечные транспортеры, выносятся на продольные транспортеры и подаются на очистку. Очищенные ягоды укладываются в тару. В процессе работы в зависимости от условий подъемным устройством регулируют высоту расположения активаторов, улавливателей и транспортеров. Встряхиватель ВСО-25 предназначен для съема плодов косточковых, орехоплодных и семечковых культур. Он оснащен встряхивающим устройством, устанавливаемым на трактор, и брезентовым улавливателем. Встряхивающее устройство состоит из захвата 8 (рис. 111), стрелы 7, вибратора 3, механизма управления захватом и привода. Захват служит для удержания штамба или скелетной ветви и передачи вибрационных колебаний. Он состоит из основания 13 с резиновой подушкой 17, рога 16 с обрезиненным чехлом 15 и рычага 14 для поворота рога при захвате штамба. Захват приводится в действие гидроцилиндром 4. Вибратор служит источником колебаний и представляет собой кривошипно-шатунный механизм, преобразующий вращательное движение карданного вала трактора в колебательное движение штанги 6 с захватом 8. Частота вибраций – 1200, 900 и 650 мин-1.
Рисунок 111 – Встряхиватель плодов ВСО-25 «Стрела»: а – схема машины; б – устройство захвата; 1 – рукоятка механизма поворота захвата; 2 – гидроцилиндр подъема стрелы; 3 – вибратор; 4 – гид открытия и закрытия захвата; 5 – цепная передача; 6 – вибрирующая штанга; 7 – стрела; 8 – захват; 9 рама; 10 – клиноременная передача; 11 – редуктор; 12 – карданная передача; 13 – основание; 14 – рычаг; 15 – чехол; 16 – рог; 17 – подушка. Стрела 7 предназначена для ввода захвата 8 в крону деревьев. Управляют ею при помощи гидроцилиндра 2. Улавливатель состоит из двух щитов и двух лотков. Щиты изготовлены в виде прямоугольной рамы (из алюминиевых труб), на которую натянуто полотно. Опоры щитов регулируют по высоте. Встряхиватель работает следующим образом. Под два смежных дерева в соседних рядах предварительно устанавливают улавливатели так, чтобы лотки продольной осью совпадали с осью ряда деревьев. После этого подводят захват к штамбу или скелетной ветви так, чтобы он расположился перпендикулярно им. Вибратор включают на 3-4 с. Под действием вибрационных колебаний плоды отрываются и падают на полотно улавливателя, с которого они скатываются в лотки, а затем в тару. Виноградоуборочный комбайн КВР-1убирает один рядтехнических сортов винограда методом встряхивания с вертикальных шпалер с междурядьями 2-4 м на участках с уклоном до 5°. В комбайн входят высококлиренсное портальное шасси, правый 11 (рис. 112) и левый 4 встряхиватели, правый 9 и левый 2 улавливатели, два транспортера, два пневмоочистителя и гидросистема. Встряхиватель состоит из двух секций, имеющих ударные стержни 3 и 12 из стекловолокна. Стержни прикреплены к стойке, приводимой в колебательное движение от эксцентрикового вала.
Рисунок 112 – Схема рабочего процесса виноградоуборочного 1, 13 – горизонтальные ветви транспортеров; 2, 9 – улавливатели; 3, 12 – стержни; 4, 11 – встряхиватели; 5 – вентилятор; 6, 8 – наклонные ветви транспортеров; 7 – бункер-накопитель; 10 – сопло Пневмоочиститель включает в себя два вентилятора 5 и нагнетательные сопла 10, установленные над горизонтальными ветвями 1 и 13 транспортеров. Во время движения машины стержни ударяют с двух сторон по виноградным кустам и сообщают им колебания. От лоз и стеблей отделяются ягоды, падают на поверхность улавливателей, скатываются с них на две стороны и транспортерами загружаются в бункера-накопители 7. Воздушный поток, выходящий из сопла 10, выдувает листья и другие примеси за пределы рабочей камеры. Из бункеров виноград выгружают в транспортное средство и доставляют на пункт переработки. Комбайн комплектуют сменным барабанным встряхивателем, который устанавливают вместо бичевых встряхивателей при уборке трудносъемных сортов (типа Ркацители). Встряхиватель состоит из двух вертикальных барабанов, гасителей колебаний и направляющих. Во время движения комбайна барабаны, совершающие поперечные колебания, раскачивают проволоку шпалер и передают колебания кустам винограда. Прутковые барабаны гасителей колебаний свободно перекатываются по кусту и предотвращают раскачивание шпалер вне зоны рабочей камеры комбайна. Рабочая скорость комбайна – 2,1 км/ч, производительность – до 0,5 га/ч. Объем бункеров – 0,9 м3. Самоходный комбайн СВК-ЗМ предназначен для уборки винограда с вертикальных шпалер на равнинах и склонах крутизной до 12°. Машина состоит из бичевых встряхивателей, ковшовых улавливателей, двух пневмосепараторов, поперечных и выгрузных транспортеров и бункера-накопителя объемом 1,8 м3. Для привода рабочих органов установлен двигатель мощностью 55 кВт. Стабилизацию горизонтального положения машины на склонах обеспечивают два гидроцилиндра, изменяющих вылет телескопических опор задних колес относительно рамы, а также система тросов и блоков, связывающих опоры задних колес с опорами передних колес. При движении комбайна вдоль ряда бичи встряхивателя отделяют ягоды от кустов, и они попадают на ковшовые элеваторы, которые улавливают их и переносят на поперечный и продольный транспортеры. В местах перехода ягод с ковшовых транспортеров на поперечные виноград очищается от примесей под действием потока воздуха, создаваемого вентилятором. Затем урожай направляется в бункер-накопитель. Рабочая скорость комбайна – 5 км/ч, производительность – 0,6 га/ч.

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|