|
|
Методика выполнения работы и обработки результатов измерений3.3.1 Изучить устройство и принцип работы макета механизма. 3.3.2 Составить схему механизма (см. примеры схем механизмов в разделе 2) и занести ее в отчет. 3.3.3 Определить нулевое положение механизма. 3.3.4 Измерить текущие перемещения (линейные или угловые) выходного звена, соответствующие углу поворота входного звена через каждые 30°. Результаты измерений занести в отчет. 3.3.5 Вычислить перемещения выходного звена путем вычитания из текущего перемещения значения нулевого перемещения. Перевести градусы в радианы для углового перемещения выходного звена. Результаты вычислений занести в отчет. 3.3.6 Построить диаграмму перемещений выходного звена (см. раздел 2). 3.3.7 Построить графическим дифференцированием метода: хорд диаграммы аналогов скорости и ускорения выходного звена (см. раздел 2). 3.3.8 Вычислить по формулам (3.1), (3.2), (3.10), (3.11) масштабы угла поворота входного звена, перемещений, аналогов скорости и ускорения выходного звена, совершающего линейные перемещения, по формулам (3.1), (3.3), (3.12), (3.13) для выходного звена, совершающего угловые перемещения. Вычисления привести в отчете. Указать значения масштабов на диаграммах. 3.3.9 Вычислить для заданного значения угловой скорости входного, звена и одного из положений выходного звена (и то, и другое указывает преподаватель) по диаграммам аналогов скорости и ускорения и формулам (3.7), (3.9) линейные скорость и ускорения выходного звена, по формулам (3.4), (3.6) угловые скорость и ускорение выходного звена. Вычисления привести в отчете. 3.3.10 Сформулировать выводы, в которых следует привести значения угловой скорости входного звона, аналогов и действительных значений скорости и ускорения для принятого положения выходного звена. Составление отчёта Составить отчёт по лабораторной работе согласно прилагаемой форме. Форма отчёта Лабораторная работа №3. Кинематический анализ рычажных механизмов методом диаграмм 1 Цель работы 2 Схема механизма 3 Результаты измерений и вычислений перемещения выходного звена
4 Диаграммы перемещений, аналогов скорости и ускорения выходного звена. 5 Масштабы угла поворота ведущего звена, перемещений, аналогов скорости и ускорения выходного звена. 6 Заданное значение угловой скорости выходного звена и номер положения выходного звена, значение аналогов и действительных значений скорости и ускорения выходного звена. 7 Выводы Работу выполнил Работу принял Лабораторная работа №4 Кинематический анализ кулачкового механизма
Цель работы Определение экспериментальной зависимости перемещения выходного звена от угла поворота кулачка при постоянной скорости его вращения и расчетной зависимости скорость-время и ускорение - время путем графического дифференцирования.
Общие сведения Кулачковый механизм предназначен для преобразования непрерывного движения (поступательного или вращательного) входного звена (кулачка) в прерывистое движение (поступательное или неполное вращательное) выходного звена (толкателя или коромысла). Достоинство кулачковых механизмов в том, что они могут обеспечить практически любой закон движения выходного звена путём выбора соответствующего профиля кулачка. Задача кинематического анализа конкретного кулачкового механизма состоит в определении закона движения выходного звена по заданному закону движения кулачка. Экспериментальным путём проще всего определить перемещение выходного звена в функции от угла поворота кулачка, т.е.
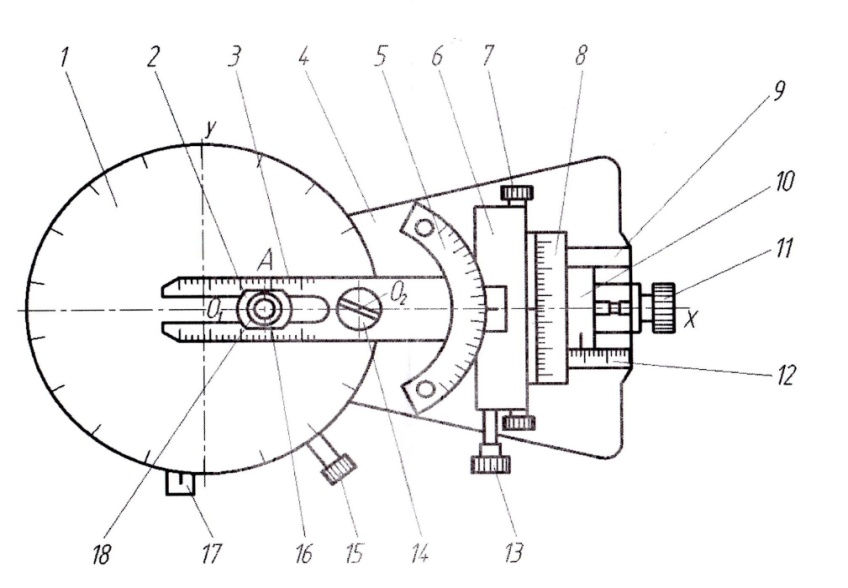
Устройство установки Лабораторная установка представляет макет кулачкового механизма, снабжений лимбом и шкалой (либо транспортиром и мерной линейкой), позволяющими регистрировать положение входного и выходного звеньев. Входное звено (кулачок) при выполнении лабораторной работы приводится в движение вручную.
1 – диск, 2 – ползун, 3 – коромысло, 4 – основание, 5 – шкала сектора, 6 – корпус, 7 – винт фиксации шкалы, 8 – шкала отсчёта по оси х, 9 – направляющая, 10 – фиксатор, 11- винт установки межцентрового расстояния, 12 – шкала отсчёта по оси у, 13 – винт перемещения коромысла, 14 – игла, 15 – рукоятка, 16 – кнопка с иглой, 17 – указатель, 18 – устройство вычерчивания ролика
Рис. 4.1 - Лабораторная установка ТММ-21

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|




 При постоянной угловой скорости кулачка
При постоянной угловой скорости кулачка  полученная зависимость аналогична зависимости S(t) или
полученная зависимость аналогична зависимости S(t) или  , т.к.
, т.к.  . Графическим дифференцированием зависимости S(t) или
. Графическим дифференцированием зависимости S(t) или  можно получить зависимости скорость - время V(t) или
можно получить зависимости скорость - время V(t) или  и ускорение – время a(t) или E(t).
и ускорение – время a(t) или E(t).