
|
|
Методика выполнения работы и обработки результатов
2.3.1 Начертить схему механизма, обозначить звенья арабскими цифрами, кинематические пары - латинскими буквами. 2.3.2 Перечислить подвижные звенья, высшие и низшие кинематические пары, указать их число. 2.3.3 Вычислить по формуле (2.1) степень свободы механизма, исключив пассивные условия связи и лишние степени свободы. 2.3.4 Заменить внешние пары низшими и начертить схему мгновенного заменяющего механизма. Убедиться в том, что степень подвижности заменяющего механизма совпадает со степенью подвижности исходного механизма. 2.3.5 Выбрать входное звено (входные звенья), которое обязательно должно образовывать со стойкой кинематическую пару. 2.3.6 Отсоединить наиболее удаленную от входного звена структурную группу второго класса, состоящую из двух звеньев в трех кинематических пар. Оставшаяся часть кинематической цепи должна оставаться механизмом с прежней степенью свободы, а не распадаться на отдельные звенья. Если не удается выделить группу второго класса, то отделить группу Ассура более высокого класса. Все остальные группы должны удовлетворять условию (2.2). Выделять группы до тех пор, пока не останутся только входные звенья со стойкой. Все группы Ассура обвести на схеме тонкой линией и указать класс и порядок групп. 2.3.7 Записать формулу строения механизма. 2.3.8 Указать класс и порядок механизма.
Составление отчёта Составить отчет по лабораторной работе согласно прилагаемой форме. Форма отчета Лабораторная работа №2 Структурный анализ механизма 1 Цель работы 2 Схема механизма и заменяющего механизма 3 Характеристика структуры механизма
Выводы
Работу выполнил
Работу принял
Лабораторная работа №3 Кинематический анализ рычажных механизмов методом диаграмм Цель работы Построение диаграммы углового или линейного перемещения выходного звена в зависимости от угла поворота входного звена, получение диаграмм, аналогов скоростей и ускорений методом графического дифференцирования. Определение действительных значений скорости и ускорения. Для выбранного положения выходного звена по диаграммам аналогов скоростей и ускорений в зависимости от угловой скорости входного звена. Общие сведения В механизмах выходное звено 3 (Рис.3.1) может совершить либо угловые перемещения (Рис. 3.1, а), либо линейные (Рис. 3.1, б). Если угловая скорость Выбирают масштаб угла поворота входного звена
где L - длина отрезка по оси абсцисс, соответствующая углу поворота за цикл, мм. Масштаб линейных перемещений выходного звена
где
С учетом масштаба КS вычисляют ординаты перемещений 11', 22', 33' и т.д. для всех положений звеньев механизма и строят диаграмму линейных перемещений в виде плавной кривой (Рис. 3.2, а).
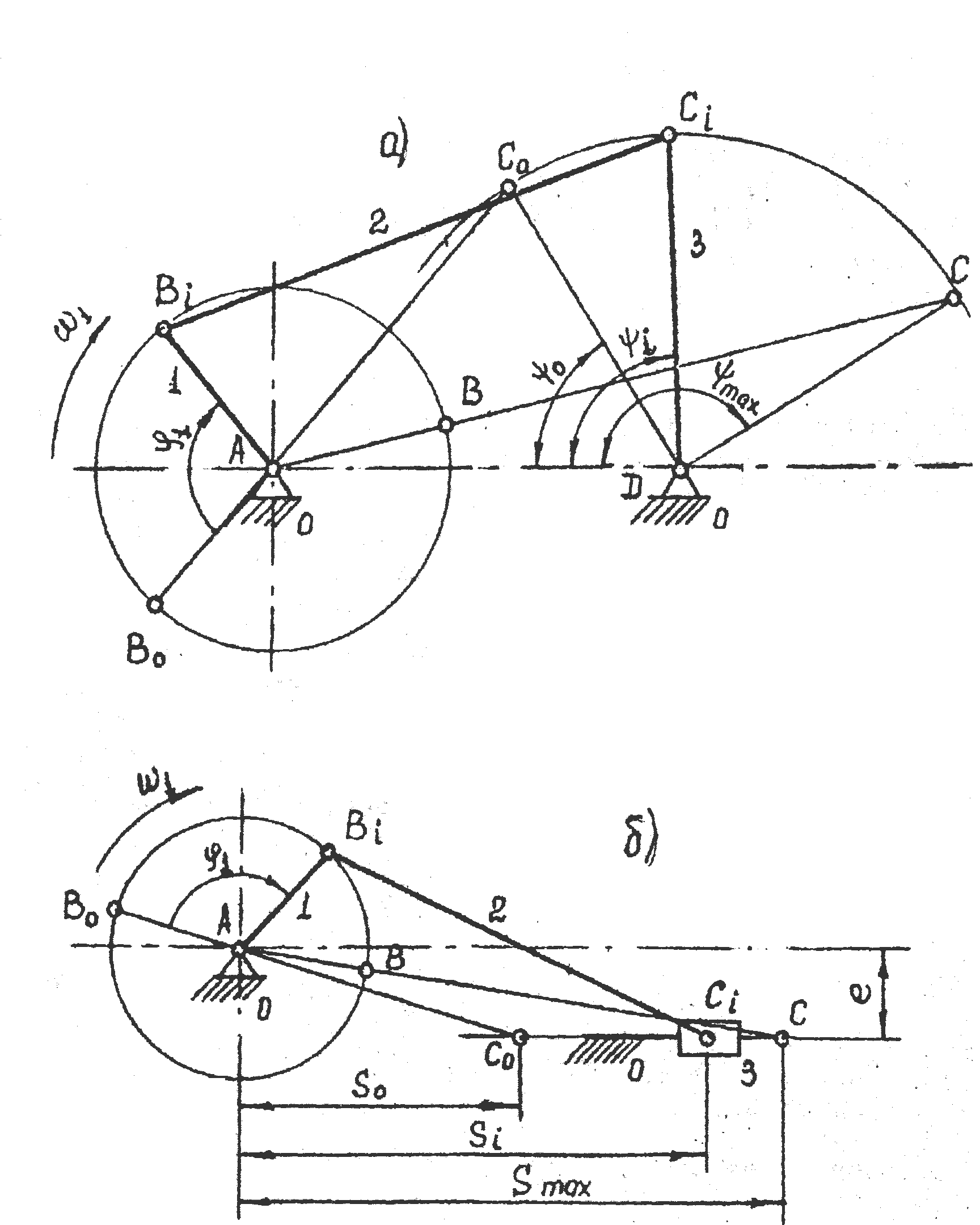
Рис. 3.1,б - Кривошипно-ползунный механизм
Для угловых перемещений выходного звена масштаб угловых перемещений
Для дальнейшего кинематического анализа механизмов чисто геометрическим путем вводят понятия аналогов скоростей и ускорений. Наличие же закона движения входного звена (т.е. угловой скорости) позволит вычислить конкретные значения скоростей и ускорений выходного звена. При угловых перемещениях выходного звена 3 (Рис.3.1.а) для определения аналогов скоростей и ускорений угол его поворота выражают зависимостью от обобщенной координаты входного звена, в качестве которой принимают угол поворота. Угловая скорость выходного звена
где
Угловое ускорение выходного звена
где
При равномерном вращении входного звена
При поступательном перемещении выходного звена 3(Рис.3.1, б) скорость точки С этого звена
где
Ускорение точки Сi выходного звена 3
где При равномерном вращении входного звена
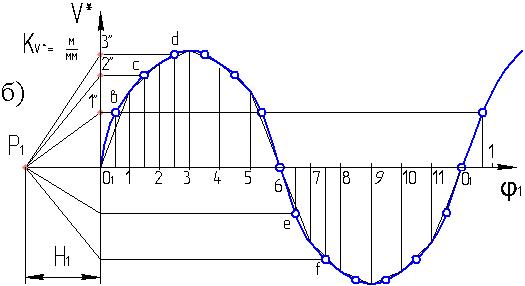
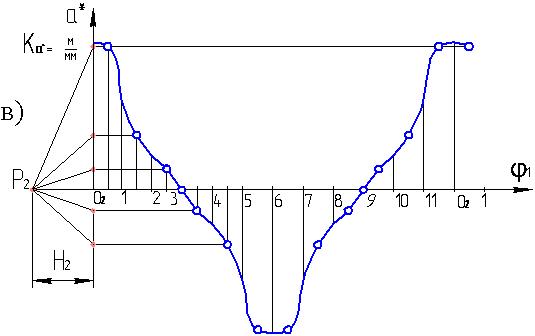
Аналоги скоростей и ускорений получают графическим дифференцированием. Суть графического дифференцирования методом хорд заключается в следующем (Рис. 3.2). На всех участках 0-1, 1-2 и т.д. диаграмм перемещений кривые заменяют хордами 01',12' и т.д. Под диаграммой перемещений (Рис. 3.2, а) строят оси координат Диаграмму аналога ускорения строят аналогичным путем (Рис. 3.2, в). При построении диаграмм строго соблюдают характерные зависимости между интегральной (например, перемещение) и дифференциальной (например, аналог скорости) кривыми: экстремумам; интегральной кривой соответствуют нулевые значения ординат дифференциальной кривой; точкам перегиба интегральной кривой соответствуют экстремумы дифференциальной кривой; возрастающим ординатам интегральной кривой соответствуют положительные значения ординат дифференциальной кривой, убывающим - отрицательные; ординаты дифференциальной кривой, соответствующие началу и концу цикла установившегося движения, равны друг другу. Масштаб аналога линейной скорости выходного звена
где Масштаб аналога линейного ускорения выходного звена
где Для углового перемещения выходного звена масштабы аналогов угловой скорости и углового ускорения вычисляются по следующим зависимостям:
Рис. 3.2, а - Графическое построение развертки положений ползуна
Рис. 3.2, б – Диаграмма аналога скорости ползуна
Рис. 3.2, в – Диаграмма аналога ускорений ползуна
Если задан закон движения входного звена (например, масштаб времени:
масштаб угловой и линейной скоростей выходного звена:
масштабы углового и линейного ускорений выходного звена

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|
 входного звена не задана, то для кинематического анализа механизма можно построить диаграмму перемещений в зависимости от угла поворота входного звена. Для этого на механизме или его макете определяют нулевое положение механизма (соответствует угловому перемещению
входного звена не задана, то для кинематического анализа механизма можно построить диаграмму перемещений в зависимости от угла поворота входного звена. Для этого на механизме или его макете определяют нулевое положение механизма (соответствует угловому перемещению  или линейному
или линейному  звена 3). Поворачивая входное звено каждый раз на один и тот же угол (например, на 30°), замеряют текущие перемещения
звена 3). Поворачивая входное звено каждый раз на один и тот же угол (например, на 30°), замеряют текущие перемещения  . Путем вычитания нулевого значения
. Путем вычитания нулевого значения  . Из каждого текущего перемещения вычисляют истинные значения перемещений. Угловые перемещения из градусов переводят в радианы.
. Из каждого текущего перемещения вычисляют истинные значения перемещений. Угловые перемещения из градусов переводят в радианы. (3.1)
(3.1) - угол поворота входного звена за цикл, рад;
- угол поворота входного звена за цикл, рад; (3.2)
(3.2) - максимальное перемещение выходного звена, м;
- максимальное перемещение выходного звена, м; - максимальная ордината диаграмм перемещений, мм.
- максимальная ордината диаграмм перемещений, мм. . (3.3)
. (3.3) , (3.4)
, (3.4) - угловая скорость входного звена;
- угловая скорость входного звена; аналог угловой скорости звена 3 или передаточное отношение от звена 3 к звену 1, безразмерная величина.
аналог угловой скорости звена 3 или передаточное отношение от звена 3 к звену 1, безразмерная величина.
 ,(3.5)
,(3.5) - угловое ускорение входного звена, I/c2;
- угловое ускорение входного звена, I/c2; - аналог углового ускорения звена 3, безразменая величина.
- аналог углового ускорения звена 3, безразменая величина. и угловое ускорение выходного звена
и угловое ускорение выходного звена (3.6)
(3.6) (3.7)
(3.7) - модуль радиуса-вектора, определяющего положение точки Сi звена 3;
- модуль радиуса-вектора, определяющего положение точки Сi звена 3; - аналог скорости точки Сi или передаточное отношение от точки Сi к звену 1, м;
- аналог скорости точки Сi или передаточное отношение от точки Сi к звену 1, м;
 , (3.8)
, (3.8) - аналог ускорения точки, м.
- аналог ускорения точки, м. . (3.9)
. (3.9) и на продолжении оси
и на продолжении оси  влево откладывают отрезок
влево откладывают отрезок  (полюсное расстояние) произвольной длины (Рис. 3.2, б). Из точки
(полюсное расстояние) произвольной длины (Рис. 3.2, б). Из точки  проводят прямые
проводят прямые  и т.д., параллельные соответствующим хордам 01',12' и т.д. диаграмм перемещений. Отрезки
и т.д., параллельные соответствующим хордам 01',12' и т.д. диаграмм перемещений. Отрезки  и т.д. на оси ординат пропорциональные аналогу средних скоростей участков. Эти отрезки откладывают на серединах соответствующих участков. Полученные точки b,c,d и т.д. соединяют плавной кривой и получают диаграмму аналога скорости от середины первого участка
и т.д. на оси ординат пропорциональные аналогу средних скоростей участков. Эти отрезки откладывают на серединах соответствующих участков. Полученные точки b,c,d и т.д. соединяют плавной кривой и получают диаграмму аналога скорости от середины первого участка  до середины последнего участка
до середины последнего участка  . Для построения полной диаграммы ее ось абсцисс удлиняют еще на один участок
. Для построения полной диаграммы ее ось абсцисс удлиняют еще на один участок  , (3.10)
, (3.10) - полюсное расстояние, мм.
- полюсное расстояние, мм. , (3.11)
, (3.11) - полюсное расстояние, мм.
- полюсное расстояние, мм. I/
I/  (3.12)
(3.12) (3.13)
(3.13)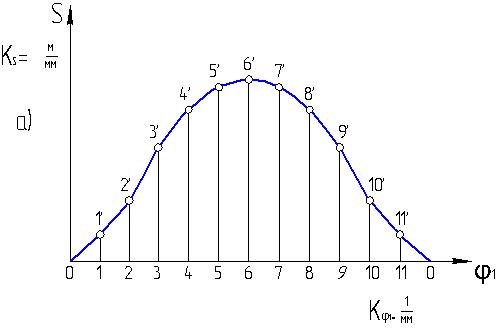
 ), то графическим дифференцированием можно построить диаграммы непосредственно скорости и ускорения. При этом масштабы диаграмм вычисляют по следующим зависимостям:
), то графическим дифференцированием можно построить диаграммы непосредственно скорости и ускорения. При этом масштабы диаграмм вычисляют по следующим зависимостям: (3.14)
(3.14) I/
I/  (3.15)
(3.15) м/
м/  I/
I/  (3.17)
(3.17) м/
м/