|
|
Краткие теоретические сведенияФГБОУ ВПО «САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ СЕРВИСА И ЭКОНОМИКИ
Кафедра «Техническая механика»
Теория механизмов и машин Лабораторный практикум для студентов всех форм обучения по направлению 190600.62 «Транспортно-технологические машины»
Санкт-Петербург Теория механизмов и машин:Лабораторный практикум работам для студентов для студентов всех форм обучения по направлению 190600.62 - Транспортно-технологические машины. - Санкт-Петербург: СПБГУСЭ, 2012. – 59 с.
Лабораторный практикум включает в себя описание семи лабораторных работ по курсу “Теория механизмов и машин”, составленная в соответствии с общепринятой терминологией и условными обозначениями. Лабораторные работы охватывают следующие разделы курса: структура плоских рычажных механизмов, кинематический анализ кулачкового механизма, кинематика многозвенных зубчатых механизмов, нарезание эвольвентных профилей зубчатых колёс методом огибания, исследование влияния режимов работы привода на КПД червячного редуктора. По каждой лабораторной работе даны краткие сведения из теории, цель работы, описание лабораторного оборудования, методические указания практического характера, примеры выполнения работ и контрольные вопросы.
Составители:к.т.н., доц. Азаркин В. Н., к.т.н., доц. Стукач А.В.
Рецензент: к.т.н., доц. Цепелев В.С.
Типография СПбГУСЭ. Заказ __________. Тираж 100 экз. П.л. ___ . Подписано в печать ___________г.
Содержание
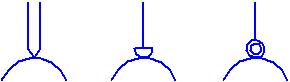
Лабораторная работа №1 Составление кинематической схемы механизма Цель работы Изучение устройства, принципа действия и составление кинематической схемы виртуального механизма построенного с помощью известных систем автоматизированного проектирования КОМПАС-3D, SolidWorks, а также в математическом пакете MathCAD. Краткие теоретические сведения Система тел, предназначенная для преобразования движения одного или нескольких тел в требуемое движение других тел, называется механизмом. Одно или несколько жестко соединенных твердых тел называется звеном. Звенья совершают различные, но взаимосвязанные движения. Это обуславливается тем, как они соединены друг с другом. Соединение двух соприкасающихся звеньев, допускающее их относительное движение, называется кинематической парой. Поверхности, линии, точки звена, по которым оно может соприкасаться с другим звеном, образуя кинематическую пару, называется элементами звена. По числу условий связи, накладываемых на относительное движение звеньев пары, кинематические пары делятся на5классов (Табл. 1.1). Число условий связи S, налагаемых кинематической парой, и число степеней свободы Н звена кинематической пара в относительном движении определяется следующей зависимостью: По виду элементов звеньев кинематические пары делятся на низшие и высшие. Кинематическая пара, выполненная соприкосновением элементов ее звеньев только по поверхности, называется низшей. Пара, выполненная соприкосновением элементов ее звеньев по линии или в точках, называется высшей.
Таблица 1.1 Кинематические пары различных классов
Связанная система звеньев, образующих между собой кинематические пары, называется кинематической цепью. Простой называется кинематическая, цепь, у которой каждое звено входит не более чем в две кинематические пары. Сложной называется кинематическая цепь, у которой имеется хотя бы одно звено, входящее более чем в две кинематические пары. Замкнутой называется кинематическая цепь, все звенья которой входят не менее чем в две кинематические пары. У незамкнутой кинематической цепи есть звенья, входящие только в одну кинематическую пару. По характеру относительного движения звеньев кинематические цепи делятся на плоские и пространственные. Плоской называется цепь, в которой все точки звеньев описывают траектории, лежащие в параллельных плоскостях. Пространственной называется цепь, в которой все точки звеньев описывают неплоские траектории или траектории, лежащие в пересекающихся плоскостях. В практике большинство механизмов образовано замкнутыми кинематическими цепями. Поэтому рассматривая механизм с точки зрения кинематической цепи, можно сформулировать следующее определение механизма. Механизм - кинематическая цепь, у которой при заданном движении одного или нескольких звеньев относительно любого из них все остальные звенья совершит однозначно определяемые движения. Звенья, движением которых задаются, называются входными. Звено, совершающее требуемое движение, для которого предназначается механизм, называется выходным. Остальные подвижные звенья называются соединительными или промежуточными. Неподвижное звено называется стойкой. Для кинематического и динамического исследования механизма составляется кинематическая схема. Кинематической схемой механизма называется его графическое изображение при помощи условного обозначения звеньев и кинематических дар, выполненное в масштабе (в отличие от просто схемы, выполняемой без соблюдения масштаба). Правила выполнения кинематических схем регламентированы ГОСТ 2.703-68, условные обозначения элементов кинематики -ГОСТ 2.770-68. Условные графические обозначения наиболее распространенных элементов кинематических схем приведены в Табл. 1.2. Масштабом кинематической схемы называется отношение истинной длины звена или расстояния в м к длине отрезка в мм, который изображает эту длину или расстояние на схеме (обозначение
Рекомендуемые значения масштаба: 0,001; 0,002; 0,005; 0,01; 0,02; 0,05; 0,1; 0,2; 0,5; I; 2; 5; 10; 20; 50 и т.д. Значение масштаба может быть вычислено по длине любого звена. При известном масштабе и истинной длине звена (например,
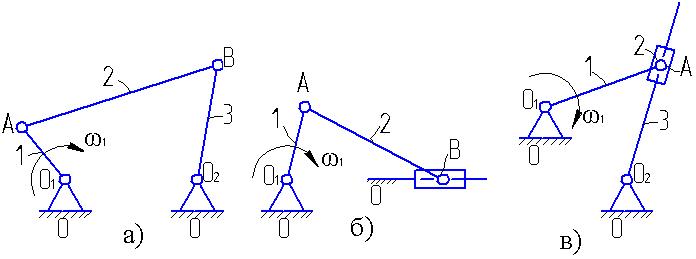
Кинематическая схема механизма строится в выбранном масштабе с точным соблюдением относительного расположения звеньев и пар, с указанием величины масштаба, размеров звеньев и расстояний между неподвижными точками и линиями. Все лишнее, не имеющее отношения к геометрии движения механизма, на кинематической схеме должно быть исключено. При составлении кинематической схемы плоских механизмов чертеж должен совпадать с плоскостью, параллельно которой движутся точки звеньев механизма (исключение составляют передачи с цилиндрическими зубчатыми колесами, когда для наглядности схема вычерчивается в плоскости, перпендикулярной плоскости вращения колес). На Рис.1.1 изображены схемы основных плоских рычажных механизмов. На схемах звенья обозначены арабскими цифрами, кинематические пары - латинскими буквами. Кинематические пары могут еще обозначаться комбинацией номеров звеньев, образующих кинематическую пару. Например, кинематическая пара 0-1 образована стойкой 0 и звеном I. Во всех механизмах звено 0 является стойкой, звено I - ведущим. Оно совершает вращательное движение вокруг оси, проходящей через точку 01, на угол 360е и называется кривошипом. Звено 2, совершающее в механизмах (Рис. 1.1, а, Рис.1.1, б) плоскопараллельное движение и не образующее кинематические пары со стойкой, называется шатуном. Звено 3 (Рис. 1.1, а) совершает неполное вращательное движение (на угол меньше 360°) вокруг О2и называется коромыслом. Звено 3 (Рис. 1.1, б) совершает поступательное движение по неподвижной направляющей и называется ползуном. Звено 2 (Рис. 1.1, в) перемещающееся по подвижной направляющей, называется кулисным камнем, а сама направляющая 3 - кулисой.
Рис. 1.1 – Схемы рычажных механизмов а -кривошипно-коромысловый четырехзвенник; б - кривошипно-ползунный; в - кулисный
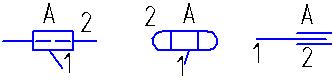
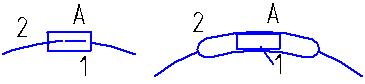
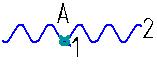
Таблица 1.2 Условные обозначения элементов кинематических схем
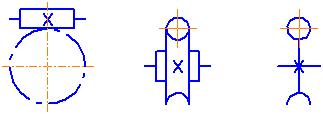
Продолжение таблицы 1.2
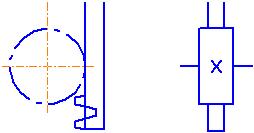
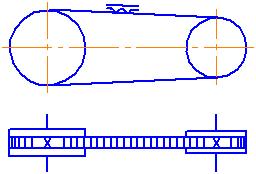
Продолжение таблицы 1.2

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|
 (1.1)
(1.1)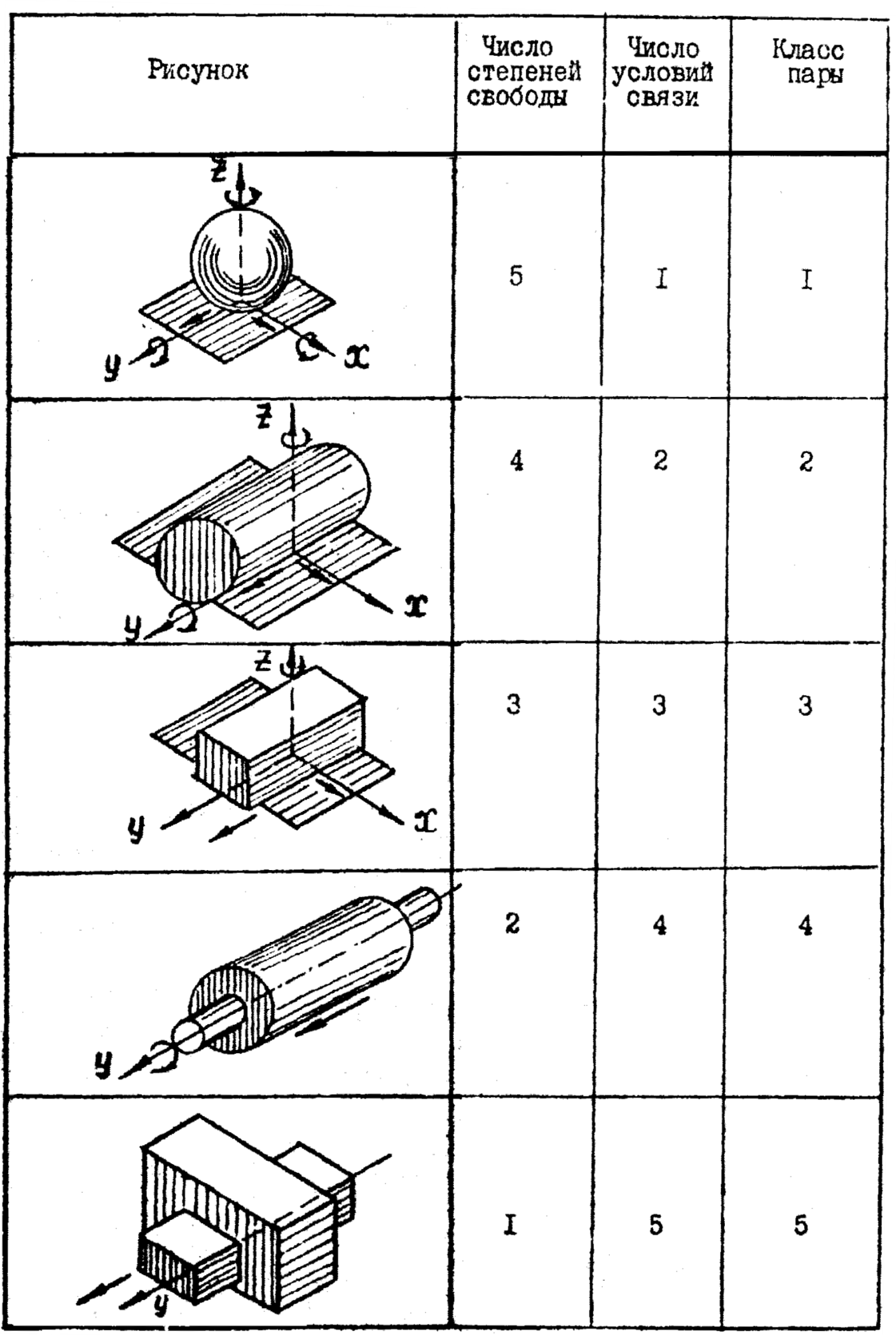
 размерность м/мм). Следовательно, если истинную длину
размерность м/мм). Следовательно, если истинную длину  звена изобразить на схеме отрезком АВ, то масштаб кинематической схемы
звена изобразить на схеме отрезком АВ, то масштаб кинематической схемы , м/мм. (1.2)
, м/мм. (1.2) ) длина отрезка ВС на кинематической схеме определяется следующей зависимостью:
) длина отрезка ВС на кинематической схеме определяется следующей зависимостью: , мм. (1.3)
, мм. (1.3)