|
|
РАСЧЕТ И КОНСТРУИРОВАНИЕ ДЕТАЛЕЙ МАШИНОГЛАВЛЕНИЕ
ПРЕДИСЛОВИЕ......................................................................... 11
РАЗДЕЛ 1 ОСНОВЫ РАСЧЕТА АБСОЛЮТНО ТВЕРДОГО ТЕЛА КАК МОДЕЛИ МЕХАНИЧЕСКОГО ОБЪЕКТА..................... 12
ГЛАВА 1. ОСНОВНЫЕ ПОЛОЖЕНИЯ СТАТИКИ................... 12 1.1. Общие сведения................................................... 12 1.2. Аксиомы статики.................................................. 13 1.3. Связи и их реакции............................................... 16
ГЛАВА 2. ПЛОСКАЯ СИСТЕМА СХОДЯЩИХСЯ СИЛ.......... 19 2.1. Сложение плоской системы сходящихся сил. Геометрическое условие равновесия......................... 19 2.2. Определение равнодействующей системы сходящихся сил методом проекций. Аналитическое условие равновесия........................... 21
ГЛАВА 3. ТЕОРИЯ ПАР СИЛ НА ПЛОСКОСТИ...................... 23 3.1. Пара сил. Эквивалентность пар сил.................... 23 3.2. Сложение пар сил. Условие равновесия пар...... 25 3.3. Момент пары относительно точки...................... 26
ГЛАВА 4. ПЛОСКАЯ СИСТЕМА ПРОИЗВОЛЬНО РАСПОЛОЖЕННЫХ СИЛ (ПСПРС) 27 4.1. Приведение силы к точке..................................... 27 4.2. Приведение к точке плоской системы произвольно расположенных сил............................... 28 4.3. Теорема Вариньона.............................................. 32 4.4. Уравнения равновесия и их различные формы... 32 4.5. Балочные системы. Разновидности опор и виды нагрузок........................................................... 35 4.6. Реальные связи. Трение скольжения и его законы................................................................. 37
ГЛАВА 5. ПРОСТРАНСТВЕННАЯ СИСТЕМА СИЛ................. 40 5.1. Сложение пространственной системы сходящихся сил. Условие равновесия........................ 40 5.2. Момент силы относительно оси.......................... 42 5.3. Пространственная система произвольно расположенных сил. Условие равновесия 44
ГЛАВА 6. КИНЕМАТИКА ТОЧКИ............................................. 46 6.1. Основные понятия кинематики............................ 46 6.2. Способы задания движения точки....................... 50 6.3. Определение скорости точки при естественном способе задания ее движения 52 6.4. Определение ускорения точки при естественном способе задания ее движения....... 53 6.5. Частные случаи движения точки......................... 55
ГЛАВА 7. ПРОСТЕЙШИЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА...... 58 7.1. Поступательное движение................................... 58 7.2. Вращательное движение. Угловая скорость, угловое ускорение....................................................... 61 7.3. Частные случаи вращательного движения.......... 63 7.4. Скорости и ускорения различных точек вращающегося тела..................................................... 66 7.5. Способы передачи вращательного движения..... 69
ГЛАВА 8. СЛОЖНОЕ ДВИЖЕНИЕ............................................ 70 8.1. Сложное движение точки..................................... 70 8.2. Плоскопараллельное движение тела................... 73 8.3. Определение скорости любой точки тела при плоскопараллельном движении........................... 75
ГЛАВА 9. ДВИЖЕНИЕ НЕСВОБОДНОЙ МАТЕРИАЛЬНОЙ ТОЧКИ.......................................................... 77 9.1. Основные понятия и аксиомы динамики............. 77 9.2. Свободная и несвободная точки.......................... 80 9.3. Силы инерции....................................................... 81 9.4. Принцип Даламбера............................................. 83
ГЛАВА 10. РАБОТА И МОЩНОСТЬ......................................... 83 10.1. Работа постоянной силы при прямолинейном перемещении…………………………………………….84 10.2. Работа равнодействующей силы..................... 85 10.3. Работа переменной силы на криволинейном пути............................................ 87 10.4. Мощность......................................................... 88 10.5. Механический коэффициент полезного действия................................................... 88 10.6. Работа сил на наклонной плоскости............... 90 10.7. Работа и мощность при вращательном движении тел............................................................. 92 10.8. Трение качения. Работа при качении тел........ 94
ГЛАВА 11. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ........................... 95 11.1. Импульс силы. Количество движения. Кинетическая энергия............................................... 95 11.2. Теорема об изменении количества движения точки......................................................... 96 11.3. Теорема об изменении кинетической энергии точки 97 11.4. Понятие о механической системе................... 97 11.5. Основное уравнение динамики вращающегося тела................................................... 99 11.6. Кинетическая энергия тела. Кинетический момент............................................. 101 РАЗДЕЛ 2 ОСНОВЫ ПОСТРОЕНИЯ И ИССЛЕДОВАНИЯ МЕХАНИЗМОВ................................... 103 ГЛАВА 12. СТРУКТУРА МЕХАНИЗМОВ............................... 103 12.1. Основные понятия.......................................... 103 12.2. Классификация кинематических пар. Кинематические цепи.............................................. 104 12.3. Структурный синтез и анализ механизмов... 106 12.4. Конструктивно-функциональная классификация механизмов.................................... 108 12.5. Передаточное отношение.............................. 110
ГЛАВА 13. ОСНОВЫ РАСЧЕТА И ПРОЕКТИРОВАНИЯ МЕХАНИЗМОВ 111 13.1. Общие сведения о передачах. Основные виды зубчатых передач......................... 111 13.2. Общие сведения о методах изготовления зубчатых колес................................. 114 13.3. Кинематика зубчатых механизмов с неподвижными осями вращения.......................... 116 13.4. Кинематика зубчатых механизмов с подвижными осями вращения.............................. 118
ГЛАВА 14. ОСНОВЫ КИНЕМАТИЧЕСКОГО АНАЛИЗА МЕХАНИЗМОВ...................................................... 121 14.1. Задачи и методы кинематического анализа механизмов. Масштабные коэффициенты 121 14.2. Построение положений рычажных механизмов методом засечек................................. 122 14.3. Определение скоростей и ускорений рычажных механизмов методом планов 123
ГЛАВА 15. МЕТОДИЧЕСКИЕ УКАЗАНИЯ К РЕШЕНИЮ ЗАДАЧ................................................................ 127 15.1. Кинематика зубчатых механизмов с неподвижными осями вращения.......................... 127 15.2. Кинематика зубчатых механизмов с подвижными осями вращения.............................. 132 РАЗДЕЛ 3 ОСНОВЫ РАСЧЕТОВ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ..... 142 ГЛАВА 16. НАПРЯЖЕННО-ДЕФОРМИРОВАННОЕ СОСТОЯНИЕ ДЕТАЛИ.............................................................. 142 16.1. Метод сечений................................................ 142 16.2. Напряжение как мера внутренних сил.......... 144
ГЛАВА 17. НАПРЯЖЕННО-ДЕФОРМИРОВАННОЕ СОСТОЯНИЕ ЭЛЕМЕНТАРНОГО ОБЪЕМА МАТЕРИАЛА.. 147 17.1. Напряженное состояние в точке. Закон парности касательных напряжений. Главные площадки и главные напряжения. Классификация напряженных состояний............... 147 17.2. Однородное растяжение бруса как пример реализации одноосного напряженного состояния материала................................................................ 150 17.3. Продольная и поперечная деформации. Закон Гука. Модуль упругости. Коэффициент Пуассона.......................................... 152 17.4. Частный случай плоского напряженного состояния – чистый сдвиг. Закон Гука при сдвиге. 155
ГЛАВА 18. МЕХАНИЧЕСКИЕ СВОЙСТВА КОНСТРУКЦИОННЫХ МАТЕРИАЛОВ.................................. 157 18.1. Экспериментальные исследования механических свойств при проведении стандартных испытаний на растяжение 157 18.2. Условие прочности, коэффициент запаса прочности, допускаемые напряжения. 160
ГЛАВА 19. РАСЧЕТ НЕСУЩЕЙ СПОСОБНОСТИ ТИПОВЫХ ЭЛЕМЕНТОВ, МОДЕЛИРУЕМЫХ В ФОРМЕ СТЕРЖНЯ................................................................................... 162 19.1. Расчеты на прочность стержней при растяжении-сжатии.......................................... 162 19.2.Особенности расчета статически неопределимых стержневых систем...................... 163 19.3. Напряженно-деформированное состояние при прямом поперечном изгибе............................. 166 19.4. Условия прочности при прямом поперечном изгибе.................................................. 170 19.5. Расчеты на жесткость при изгибе.................. 173 19.6. Кручение вала (стержня) круглого поперечного сечения............................................... 175 19.7. Расчеты на прочность и жесткость при кручении........................................................... 176 19.8. Условие прочности вала при совместном действии крутящего и изгибающего моментов..... 180
ГЛАВА 20. УСТОЙЧИВОСТЬ СЖАТЫХ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ................................................ 184 20.1. Понятие о критической силе для сжатого стержня. Формула Эйлера................. 184 20.2. Критическое напряжение. Пределы применимости формулы Эйлера............................ 188 РАЗДЕЛ 4 РАСЧЕТ И КОНСТРУИРОВАНИЕ ДЕТАЛЕЙ МАШИН ОБЩЕГО НАЗНАЧЕНИЯ И ДЕТАЛЕЙ ОТРАСЛИ............ 190 ГЛАВА 21. ЗУБЧАТЫЕ ПЕРЕДАЧИ........................................ 190 21.1. Геометрический расчет эвольвентных прямозубых передач............................................... 190 21.2. Особенности геометрии косозубых, шевронных и конических передач......................... 194 21.3. Особенности геометрии конических колес.. 196 21.4. Усилия в зацеплении зубчатых передач....... 198 21.5. Материалы и термообработка для зубчатых колес................................................. 201 21.6. Расчеты зубьев на сопротивление усталости по изгибным и контактным напряжениям.............. 202
ГЛАВА 22. ЧЕРВЯЧНЫЕ ПЕРЕДАЧИ...................................... 205 22.1. Общие сведения. Геометрические и кинематические особенности червячных передач 205 22.2. Усилия в зацеплении. Расчет зубьев колес. Тепловой расчет червячных передач..................... 209
ГЛАВА 23. РЕМЕННЫЕ ПЕРЕДАЧИ....................................... 212 23.1. Общие сведения. Ремни. Шкивы................... 212 23.2. Скольжение ремня.......................................... 217 23.3. Усилия и напряжения в ремнях. Тяговая способность и КПД передачи................... 220
ГЛАВА 24. ЦЕПНЫЕ ПЕРЕДАЧИ............................................ 224 24.1. Общие сведения. Цепи. Материалы.............. 224 24.2. Усилия в элементах передачи. Расчет передачи...................................................... 226
ГЛАВА 25. НЕСУЩИЕ ДЕТАЛИ И ОПОРНЫЕ УСТРОЙСТВА МЕХАНИЗМОВ................................................ 228 25.1. Валы и оси. Классификация. Расчет на прочность. Материалы........................... 228 25.2. Опоры валов и осей. Классификация подшипников................................. 231 25.3. Динамическая грузоподъемность подшипников качения. Выбор подшипников и определение их ресурса................................................................ 236 25.4. Муфты механических приводов. Общие сведения и классификация.......................... 237 25.5. Муфты общего назначения. Особенности расчета.............................................. 239 25.6. Предохранительные муфты........................... 240
ГЛАВА 26. СОЕДИНЕНИЯ ДЕТАЛЕЙ И УЗЛОВ МАШИН... 242 26.1. Сварные соединения. Общие сведения и характеристика. Изображения и обозначения на чертежах швов сварных соединений................. 242 26.2. Расчет на прочность и проектирование сварных соединений при постоянных нагрузках... 249 26.3. Соединения пайкой и склеиванием............... 253 26.4. Соединения типа «вал–ступица». Общая характеристика и особенности расчета 254 26.4.1. Шпоночные соединения..................... 255 26.4.2. Шлицевые соединения........................ 256 26.4.3. Профильные соединения.................... 257 26.4.4. Штифтовые соединения..................... 258 26.5. Резьбовые соединения.................................... 260 26.5.1. Крепежные детали и стопорящие устройства 260 26.5.2. Резьба и ее параметры........................ 261 26.5.3. Силовые зависимости в резьбовом соединении 263 26.5.4. Самоторможение и коэффициент полезного действия винтовой пары............... 266 26.5.5. Расчет резьбовых соединений на прочность................................................... 267 26.5.6. Расчет резьбовых соединений при переменном режиме нагружения............ 273
ЛИТЕРАТУРА........................................................................... 275 ПРИЛОЖЕНИЕ......................................................................... 278
ПРЕДИСЛОВИЕ
Данное издание предназначено для студентов, изучающих курс механики по программе, утвержденной Министерством образования Республики Беларусь для высших учебных заведений. Изложение материала в основном соответствует традиционной программе механики исходя из того, что она является комплексной общепрофессиональной дисциплиной по немашиностроительным специальностям. Пособие включает в себя основные положения дисциплин «Теоретическая механика», «Сопротивление материалов», «Теория механизмов и машин», «Детали машин». Необходимым явилось включение в курс механики в том или ином объеме положений дисциплины «Расчет и конструирование изделий отрасли». Цель пособия – дать студенту знания и навыки по выполнению расчетов и конструированию, необходимые при последующем изучении специальных дисциплин, а также в его профессиональной деятельности. В силу компактности и комплексного характера курса механики на лекциях требуется лаконичность изложения материала при достаточно подробном изложении лишь принципиальных вопросов. Автор использует данный материал при прочтении лекций по механике. Настоящее пособие рекомендуется всем тем, кто изучает, преподает и просто интересуется элементарной механикой. Пособие будет полезно при изучении, повторении и углублении курса механики, а также для быстрого нахождения, беглого прочтения и восстановлении в памяти необходимой информации, может быть использовано для самостоятельной работы студентов. Автор считает своей обязанностью выразить благодарность А.Т. Скойбеде, оказавшему помощь в подготовке книги, а также с благодарностью примет все замечания об этом пособии. РАЗДЕЛ 1 ОСНОВЫ РАСЧЕТА АБСОЛЮТНО ТВЕРДОГО ТЕЛА
Глава 1. Основные положения статики
1.1. Общие сведения
Материальной точкой называют геометрическую точку, обладающую массой. Абсолютно твердым телом называют такое материальное тело, в котором расстояние между любыми двумя точками всегда остается неизменным. Способность тел сопротивляться изменению их формы и размеров называется жесткостью. Мера механического действия одного материального тела на другое называется силой. Сила – величина векторная. Она определяется, во-первых, числовым значением (модулем), во-вторых, точкой приложения (местом контакта взаимодействующих тел), В Международной системе единиц (СИ) сила выражается в ньютонах (сокращенное обозначение Н). 1 Н – небольшая сила, поэтому часто употребляют кратные единицы – килоньютон (1 кН = 103 Н) и меганьютон (1 МН = 106 Н). Как всякий вектор силу можно изобразить графически в виде направленного отрезка (рис. 1.1).
Рис. 1.1. Векторы сил Сила тяжести всегда направлена вертикально вниз (рис. 1.2).
Рис. 1.2. Сила тяжести
Несколько сил, действующих на какое-либо одно твердое тело, называются системой сил. Силы, действующие на твердое тело со стороны других тел, называются внешними. Силы, действующие на материальные точки твердого тела со стороны других точек того же тела, называются внутренними.
1.2. Аксиомы статики
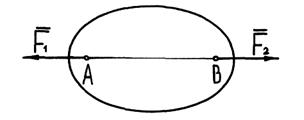
Аксиома 1 (принцип инерции). Всякая изолированная материальная точка находится в состоянии покоя или равномерного прямолинейного движения, пока приложенные силы не выведут ее из этого состояния. Состояние покоя или равномерного и прямолинейного движения точки называют равновесием. Аксиома 2 (условие равновесия двух сил). Две силы, приложенные к твердому телу, образуют уравновешенную систему только тогда, когда они равны по модулю и действуют вдоль одной прямой в противоположные стороны (рис. 1.3).
Рис. 1.3. Равновесие тела при действии на него двух сил
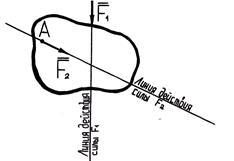
Аксиома 3 (принцип присоединения и исключения уравновешенных сил). Действие данной системы сил на твердое тело не изменится, если к ней прибавить или от нее отнять уравновешенную систему сил. Следствие.Силу, приложенную к твердому телу, можно переносить вдоль линии ее действия в любую другую точку, действие силы на тело при этом не нарушится (рис. 1.4).
Рис. 1.4. Перенос силы по линии ее действия
Свойство вектора силы справедливо только в теоретической механике (механике абсолютно твердого тела). Аксиома 4 (правило параллелограмма). Две приложенные к точке тела силы имеют равнодействующую, приложенную в той же точке и равную диагонали параллелограмма, построенного на этих силах как на сторонах (рис. 1.5).
а б
Рис. 1.5. Параллелограмм сил
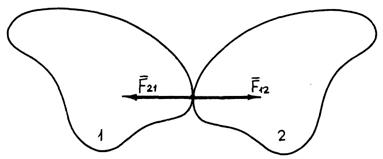
Две силы Аксиома 5 (закон действия и противодействия). Силы взаимодействия двух твердых тел друг на друга равны по модулю и направлены по одной прямой в противоположные стороны.
Рис. 1.6. Взаимодействие тел
Аксиома 6 (принцип отвердевания). Если деформируемое тело находится в равновесии, то равновесие этого тела не нарушится, если, не изменяя формы, размеров, положения в пространстве, оно превратится в абсолютно твердое тело, т. е. затвердеет. 1.3. Связи и их реакции
Твердое тело называется свободным, если оно может перемещаться в пространстве в любом направлении. В качестве примера свободного тела приведем летящий воздушный шар или ракету в космосе. Твердое тело называется несвободным, если его перемещение в пространстве ограничено какими-либо другими телами. Все тела, которые так или иначе ограничивают перемещение данного тела, называются его связями. Задача определения реакций связей – одна из основных задач статики.

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|


 и
и  приложены к разным точкам тела, но линии их действия лежат в одной плоскости (рис. 1.5, б).
приложены к разным точкам тела, но линии их действия лежат в одной плоскости (рис. 1.5, б).