|
|
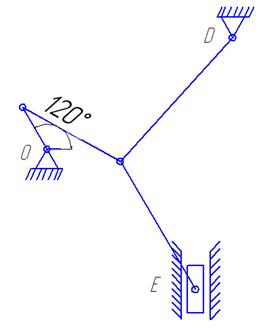
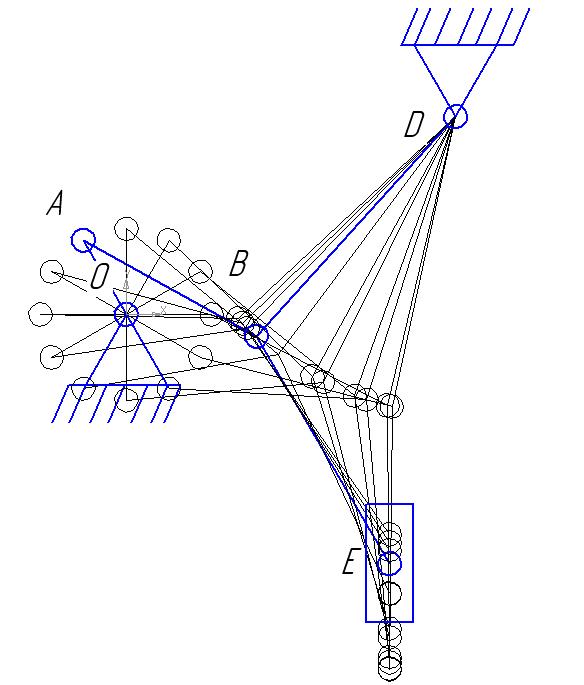
Графоаналитическое исследование кинематики механизма (для выбранного прототипа, одно промежуточное, одно крайнее)Крайнее положение (q=178град.) Схема механизма (q=178 град.)
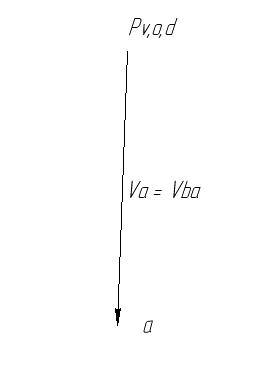
Построение плана скоростей:
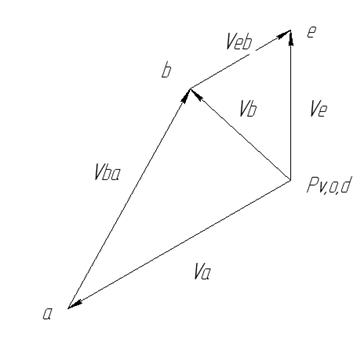
Из теоретической механики известно: Vb = Va+Vba Ve = Vb+Vbe
План скоростей
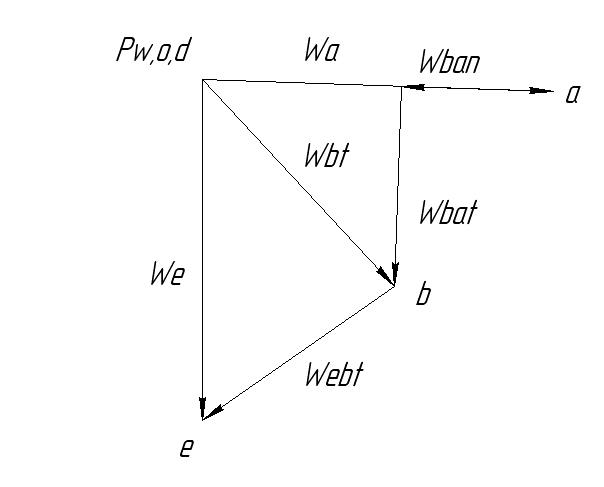
Построение плана ускорений
Из теоретической механики известно:
Wb = Wa+Wba(n)+Wba(t)
We = Wb+Web(n)+Web(t)
План ускорений
Промежуточное положение (q=120 град.).
План скоростей
План ускорений
План 12-ти положений механизма
Силовой анализ механизма Задачи силового анализа Задачей силового расчета механизма является определение реакций в кинематических парах и движущего момента, прикладываемого к начальному звену. Знание этих условий необходимо для расчета звеньев и кинематических пар на прочность, жесткость, надежность и долговечность. Результаты силового расчета используются при выборе приводного двигателя, проектировании корпусных деталей, фундамента и т.д. Определение задаваемых моментов и сил инерции Исходные данные: Массы звеньев (кг):
Осевые моменты инерции звеньев (кг*м^2):
Силы тяжести (Н):
Координаты центров масс, их скорости и ускорения: Звено 4
Звено 2
Звено 3
Определение сил инерции (H):
Определение моментов инерции (Н*м):
График зависимости величины нагрузки от обобщенной координаты График нагрузки строим в соответствии диаграммой предложенной в задании. На диаграмме указаны значения величины нагрузки в зависимости от величины шага, поэтому для построения зависимости P(q) необходимо найти значения q соответствующие значению перемещения выходного звена.
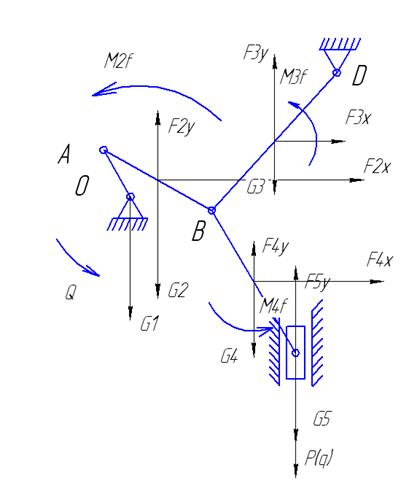
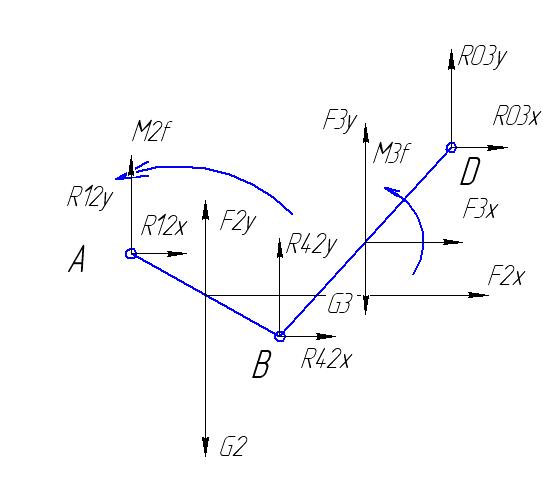
Схема механизма
Составление уравнений кинетостатики Для каждой структурной группы механизма, начиная с последней, записываем уравнения кинетостатики, приложив необходимые реакции. Определим реакции в кинематических парах для звеньев 4 и 5:
∑Fx=0 R05x+F4x+R24x=0 ∑Fy=0 P-G5+F5y+F4y+R24y-G4=0 ∑M(b)=0 –G4(Xs4-Xb)+(P-G5)(Xe-Xb)+F5y(Xe-Xb)+F4y(Xs4-Xb)+R05x(Yb-Ye)+F4x(Ye-Ys4)+M4f=0
Определим реакции в кинематических парах для звеньев 2 и 3
∑Fx=0 R03x+R42x+R12x+F2x+F3x=0
∑Fy=0 R03y+R42y+R12у+F2y+F3y-G2-G3=0
∑ Mright(b) =0 (F3y-G3)*(Xs3-Xb)-F3x*(Ys3-Y6)+R03y*(Xd-Xb)-R03x(Yd-Yb)+M3f=0 ∑ Mleft(b) =0 -R12y(Xb-Xa)-R12x(Ya-Yb)+(-F2y+G2)*(Xb-Xs2)+M2f=0
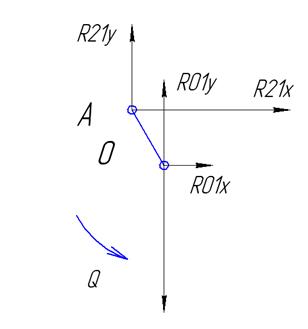
Определим реакции в кривошипе и найдем движущий момент Q:
R01y=G1-R21y
R01x=-R21x
Q1=R21y*Xa+R21x*Ya
Нахождение движущего момента из общего уранения динамики: Q= -(PYe1+F5y∙Ye1+F4x∙Xs41+F4y∙Ys41+Mf4∙f41-G4∙Ys41+M2f∙f21+F2x∙Xs21+F2y∙Ys21-G2∙Ys21+Mf3∙f31+F3x∙Xs31+F3y∙Ys31-G3∙Ys31-G5Ye1)
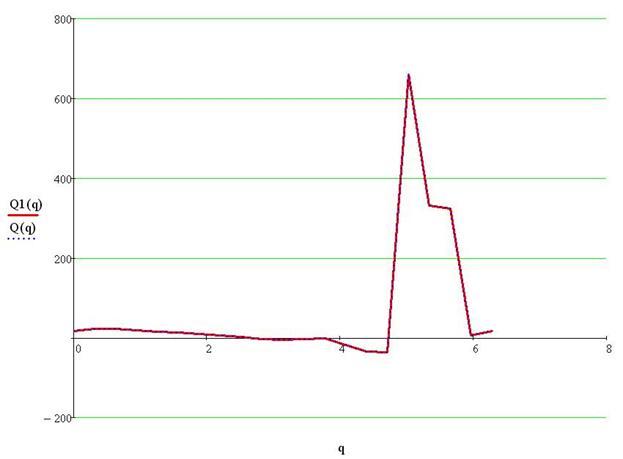
График зависимости Q1 и Q от q
Вывод: Как видно из построенных графиков – движущие моменты, полученные двумя способами, совпали.
Внешняя виброактивность механизма и машины При движении механизмов возникают переменные силы действующие на корпус машины .Такие силы возникают прежде всего в кинематических парах соединяющих подвижные звенья механизма с корпусом. Переменные силы действующие на корпус машины могут вызывать ряд явлений вибрационного характера (колебание корпуса как твердого тела относительно фундамента вследствие упругости опор упругие колебания корпуса вибрации здания в котором установлена машина ) в связи с этим способность механизма возбуждать переменные силы действующие на корпус называется его внешней виброактивностью. Снижение внешней виброактивности отдельных механизмов является одной из актуальных задач современного машиностроения поскольку вибрации приводят к резкому снижению качества работы машины и прочности надежности и долговечности. Главный вектор сил инерции и главный момент сил инерции есть меры внешней виброактивности, то для ее уменьшения необходимо уравновесить главный вектор сил инерции и главный момент сил инерции В нашей курсовой работе мы ограничимся уравновешиванием главного вектора сил инерции.. Уравновешивание можно произвести двумя способами:
Установка противовесов на звенья. Этот способ позволяет полностью уравновесить главный вектор сил инерции, но, как следствие установки противовеса, подвижные звенья механизма нагружены значительными массами.

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|