
|
|
Составление уравнений геометрического анализаВведение. Постановка задачи.
В данном курсовом проекте нам необходимо выбрать и обосновать кинематическую схему пресса гибочного, предназначенных для гибки и правки сортового металла. Количество выбираемых прототипов должно быть не менее двух. По результатам кинематического расчёта выбираем один прототип и для него производим силовой расчёт, выбираем двигатель и проводим кинематическое исследование машинного агрегата. Исходные данные.
В качестве исходных данных заданы технические характеристики механизма:
Кроме того задана нагрузочная диаграмма , которая определяет значение силы давления в зависимости от шага Н.Основными оценочными критериями будут являться габариты, масса , виброактивность , энергопотребление.
Описание работы машины.
Тип двигателя: электрический постоянного тока независимого возбуждения. Пресс гибочный состоит из двигателя, редуктора, рычажного механизма. Пресс гибочный представляет собой механизм с поступательным перемещением рабочего звена. Заготовка располагается между рабочим звеном и горизонтальным (вертикальным) звеном. Выбор критериев синтеза исполнительного механизма. Для того, чтобы спроектировать механизм, необходимо сначала выбрать прототипы будущего пресса, а затем провести их синтез по выбранным критериям с целью получения механизмов, соответствующих техническому заданию. В качестве критериев синтеза выберем следующие: - Максимальный ход рабочего звена Hmax; - Угол давления, характеризуемый коэффициентом К2; - Коэффициент изменения средней скорости Kv; - Коэффициент соотношения между силами на входе и на выходе, по – другому характеризует внешние условия передачи сил К1; Геометрический анализ выбранных прототипов Задачи геометрического анализа Целью геометрического анализа рычажного механизма является составление уравнений геометрического анализа, решение их, выделение побочных и основных решений, определяющих положения звеньев, а также исследование функция положения выходных звеньев структурных групп. Для того, чтобы спроектировать механизм, необходимо сначала выбрать прототип будущего прессв, а затем провести его синтез по выбранным критериям с целью получения механизма, соответствующего техническому заданию. В качестве критерия синтеза выберем: Ход рабочего звена Н=150 мм; коэффициенты К1, К2, Кv=1.2. ПЕРВЫЙ ПРОТОТИП Схема механизма
Длины звеньев (м)
c – коэффициент параметризации
Структурный анализ механизма Структурный анализ механизма называется разделение механизма на отдельные структурные группы. Благодаря чему упрощается геометрическое, кинематическое и динамическое исследование механизма. Целью структурного анализа механизма является определение количества звеньев и кинематических пар, классификация последних, определение подвижности пар и степени подвижности механизма, а также выделение в нем структурных групп – кинематических цепей, у которых число входов совпадает с числом степеней подвижности. Граф механизма
Число подвижных звеньев механизма N=5. Количество кинематических пар механизма P=7. Суммарное число подвижностей всех кинематических пар S=7. Число независимых контуров графа K=P-N=2. Степень подвижности механизма W=S-3K=7-6=1. Механизм нормальный, т.к. n=W. Составление уравнений геометрического анализа Геометрический анализ включает построение плана механизма в зависимости от входной координаты (q), составление групповых уравнений и их решения в общем виде. С целью проверки правильности расчетов проведено численное решение этих уравнений для одного значения (q = 120◦). Групповыми уравнениями определяются координаты характеристических точек при различных положениях частей механизма в зависимости от входной координаты. Для расчетного механизма групповые уравнения имеют вид
OA*sinq=Yd+DB*sinf3+ABsinf2
Ye+BE*sinf4=OA*sinq-AB*sinf2

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|
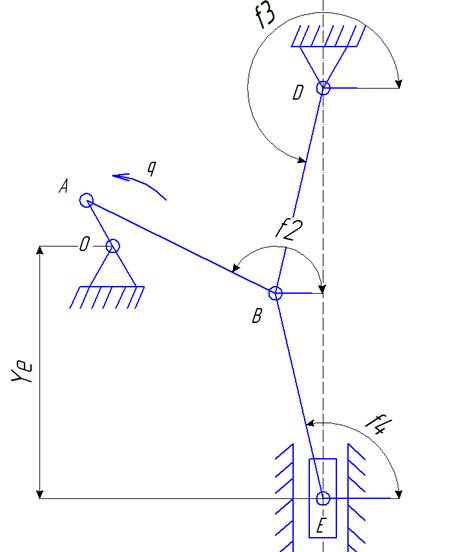








 2) OA*cosq=Xd+DB*cosf3+ABcosf2
2) OA*cosq=Xd+DB*cosf3+ABcosf2 3) Xe+BE*cosf4=OA*cosq-AB*cosf2
3) Xe+BE*cosf4=OA*cosq-AB*cosf2