
|
|
Структурный анализ рычажного механизма.Расчетно-пояснительная записка к курсовому проекту по теории механизмов и машин на тему: «Анализ и синтез механизмов Вытяжного пресса»
Выполнил:
Принял:
Балаково 2015 Содержание Задание на курсовой проект ………………………………………………………… 3 1. Кинематический и силовой анализ механизма …………………………………… 6 1.1. Структурный анализ рычажного механизма ……………………………… 6 1.2. Построение совмещенных планов положений механизма ……………….. 8 1.3. Кинематический анализ передаточного механизма ………………………. 9 1.4. Построение плана скоростей механизма. Определение линейных скоростей точек и угловых скоростей звеньев механизма ……………………. 9 1.5. Построение плана ускорений механизма. Определение линейных ускорений точек и угловых ускорений звеньев механизма …………………… 11 1.6. Построение кинематических диаграмм выходного звена ………………… 13 1.7. Силовой анализ механизма ………………………………………………… 14 2. Синтез зубчатой передачи ………………………………………………………….. 19 2.1. Выбор коэффициентов смещения зубчатых колес передачи …………….. 19 2.2. Определение типа зубчатой передачи ……………………………………… 19 2.3. Расчет геометрических размеров зубчатой передачи …………………….. 19 2.4. Построение плана зацепления зубчатых колес …………………………… 22 2.5. Определение коэффициентов удельного скольжения ……………………. 22 2.6. Определение коэффициента удельного давления ………………………… 23 3. Синтез кулачкового механизма ……………………………………………………. 24 3.1. Аналитическое исследование закона движение толкателя ………………. 24 3.2. Определение основных размеров кулачкового механизма ………………. 26 3.3. Построение профиля кулачка ………………………………………………. 27 Список использованной литературы …………………………………………………. 29
Задание на курсовой проект Рычажный механизм поршневого насоса
Основные размеры: lOA = 0.045 м; lAB = 0.32 м; lCB = lCD = 0.175 м; lDE = 0.2 м; x1 = 0.12 м; x2 = 0.15 м; y = 0.32. Массы звеньев: m1 = 16 кг; m2 = 18 кг; m3 = 20 кг; m4 = 12 кг; m5 = 8 кг. Моменты инерции звеньев: IS1 = 2.2 кг·м2; IS2 = 0.14 кг·м2; IS3 = 0.22 кг·м2; IS4 = 0.10 кг·м2. Давление в цилиндре при нагнетании: pmax = 1.2 МПа. Диаметр цилиндра: Dц = 0.042 м. Расчетное положение: 9.
Зубчатый редуктор насоса
Спроектировать зубчатое зацепление колес 4' и 5. Модуль зубьев m = 2.5 мм.
Коэффициенты смещения x4' и x5 зубчатых колес определить по блокирующему контуру из условия обеспечения стойкости зубьев против заедания и абразивного износа; коэффициент перекрытия ε = 1,2; межосевое расстояние выбирается свободно, округление не требуется. Коэффициент высоты головки зуба ha* = 1,0. Профильный угол исходного контура α = 20º. Кулачковый механизм выпускного клапана Тип кулачкового механизма
Параметры кулачкового механизма Ход толкателя smax = 20 мм Фазовый угол подъема φ1 = 80º Фазовый угол верхнего выстоя φ2 = 80º Фазовый угол опускания φ3 = 120º Угол наклона тарели γ = 90º Фазовый угол φ4 нижнего выстоя определяется из условия: Φ = φ1 + φ2 + φ3 + φ4 = 360º.
Требуемый закон движения толкателя Прямой ход (фаза подъема) толкателя
Обратный ход (фаза опускания) толкателя
Кинематический и силовой анализ механизма Цель работы: провести кинематический анализ рычажного механизма в перманентном движении методом планов и методом диаграмм; выполнить силовой анализ рычажного механизма методом кинетостатики. Структурный анализ рычажного механизма.
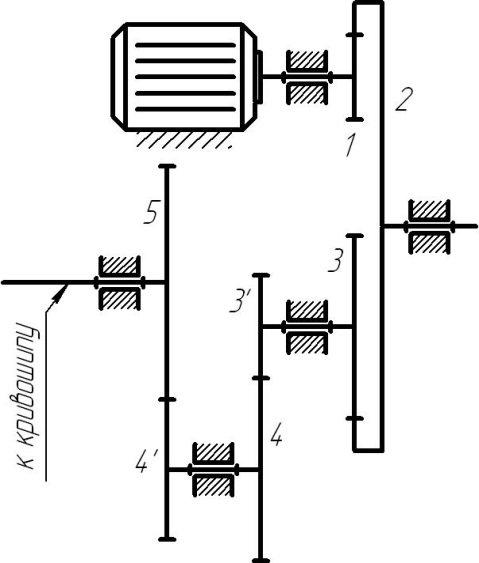
Рисунок 1.1 Cхема рычажного механизма Механизм состоит из пяти подвижных звеньев (n = 5), среди них: 1 – кривошип; 2 – шатун; 3 – коромысло; 4 – шатун; 5 – ползун. В механизме можно выделить следующие кинематические пары: О (0 - 1) – вращательная пара пятого класса; А (1 - 2) – вращательная пара пятого класса; В (2 - 3) – вращательная пара пятого класса; С (3 - 0) – вращательная пара пятого класса; D (3 - 4) – вращательная пара пятого класса; E (4 - 5) – вращательная пара пятого класса; E2 (5 - 0) – поступательная пара пятого класса. Определим число степеней свободы механизма по формуле (1.1) W = 3n - 2P5 - P4 где: W – число степеней свободы механизма; n – число подвижных звеньев механизма (n = 5); P5 - число низших пар пятого класса (P5 = 7); P4 – число высших пар четвёртого класса (P4 = 0).
Разобьём механизм на структурные группы Асура:
E`(5 - 0) – внешняя пара D (4 - 3) – внешняя пара E (4 - 5) – внутренняя пара
Рисунок 1.2 Группа Асура 4-5
Число степеней свободы определим по формуле (1.1)
Данная группа II класса 2 вид
B (3 - 2) – внутренняя пара С`(3 - 0) – внешняя пара А (2 - 1) – внешняя пара
Рисунок 1.3 Асура 2-3
Число степеней свободы определим по формуле (1.1)
Данная группа II класса 1 вида
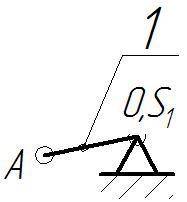
О(0 - 1) – внутренняя пара
Рисунок 1.4 Начальный механизм
Число степеней свободы начального механизма
Запишем структурную формулу механизма
Исходя из этого, определяем, что механизм II класса.
1.2. Построение совмещенных планов положений механизма. Для построения планов положений механизма принимаем масштабный коэффициент С учетом этого находим размеры звеньев механизма на чертеже:
Сначала на чертежном листе строим планы крайних положений механизма, в которых выходное звено 5 имеет остановку. Крайнее положение, предшествующее началу рабочего хода звена 5, принимаем за начальное (нулевое). От нулевого положения делим окружность движения точки B кривошипа на 12 равных частей и нумеруем положения точки B по ходу вращения кривошипа. Затем методом засечек строим в тонких линиях звенья механизма для каждого из 12-ти положений кривошипа. Обводим жирными линиями звенья механизма в расчетном положении (в данном случае в 9-ом положении), условно изображая все кинематические пары. Центры тяжести звеньев S1, S2, S3, S4, S5 обозначаем только в расчетном 9-ом положении. Траекторию движения центра тяжести S2 показываем пунктирной линией. С чертежа определяем ход (максимальное перемещение) звена 5:

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|


 при
при  ;
; при
при  ;
; при
при  .
. при
при  ;
; при
при  ;
; при
при  .
.






 .
. [мм];
[мм];  [мм];
[мм];  [мм];
[мм];  [мм];
[мм]; [мм];
[мм];  [мм];
[мм]; [мм];
[мм];  [мм];
[мм]; [мм].
[мм].  [мм].
[мм]. [мм];
[мм];  [м].
[м].