
|
|
Основные задачи при интерполяцииИнтерполяция нужна только при контурной траектории движения. При интерполяции существуют две основные задачи: 1. Расчет опорных точек эквидистанты (траектории центра инструмента) по координатам опорных точек контура детали и по размерам инструмента, формирование заданий по координатным перемещениям. 2. Задание скорости во времени по осям, при обеспечении реализации заданной в УП траектории обработки детали: ¨ задание контурной скорости ¨ вычисление задания скорости по осям в функции времени в зависимости от заданного перемещения по осям, контурной скорости 21. Интерполяция методом оценочной функции. (Т.9 АТПП). Интегратор выполнен на ПКЧ для двух координат в двоичном коде для линейной и круговой интерполяции при использовании алгоритма оценочной функции. В этом случае на каждом шаге решается алгебраическое уравнение траектории. Для линейной интерполяции:
Рис. 9.8. Интерполяция в функции знака Если F > 0, то в следующем такте надо делать перемещение по x, если F < 0, то по y. Определим оценочную функцию в следующем такте, если сделали перемещение (один импульс по y или по x). Учитывая, что
Таким образом, на каждом шаге интегрирования надо рассчитывать оценочную функцию. На практике, если имеет место перемещение по меньшей координате, производят перемещение и по большей координате. Пример: Пусть Dy = 5, Dx = 7. (Нужно сделать 12 шагов.) F (Y0,, X0) = 0 1 шаг по большей координате (по Х). F (Y0, X1) = F (Y0, X0) –Dy = 0 – 5 = –5. 2 шаг так как F (Y0, X1) < 0, делаем следующий шаг по Y. F (Y1, X1) = F (Y0, X1) +7 = –5+7 = 2. 3 шаг так как F (Y1, X1) > 0, делаем следующий шаг по Х. F (Y1, X2) = F (Y1, X1) –5 = 2–5 = –3. 4 шаг по Y. F (Y2, X2) = –3+7 = 4. 5 шаг по Х. F (Y2, X3) = 4–5 = –1. 6 шаг по Y. F (Y3, X3) = –1+7 = 6. 7 шаг по Х. F (Y3, X4) = 6–5 = 1. 8 шаг по Х. F (Y3, X5) = 1–5 = –4. 9 шаг по Y. F (Y4, X5) = –4+7 = 3. 10 шаг по Х. F (Y4, X6) = 3–5 = –2. 11 шаг по Y. F (Y5, X6) = –2+7. 12 шаг по Х. F (Y5, X7) = 5–5 = 0. Диаграмма движения представлена на рис. 9.9.
Рис. 9.9. Диаграмма движения при интерполяции
. СЧПУ «Н33»* Интегратор выполнен на ПКЧ параллельного действия, работающем в двоичном коде. Способ интегрирования называется цифровым дифференциальным анализатором. Это наиболее совершенная аппаратная стойка ЧПУ. Вначале она реализовывалась на простых микросхемах, затем на БИС.
Уравнение прямой: Уравнение окружности: В производных уравнениях прямой и окружности: В параметрической форме уравнения прямой и окружности:
Решения уравнений прямой и окружности заключается в применении двух интеграторов (рис. 9.5).
Рис. 9.5. Интегрирование при линейной и круговой интерполяции Для линейной интерполяции
На примере СЧПУ Н33 рассмотрим структуру блока задания скорости (рис. 9.10), его связи с интерполятором и выходным блоком (рис. 9.12). Функции БЗС: ¨ отработка перемещений с заданной скоростью подачи; ¨ разгон в начале отработки кадра; ¨ торможение на стыке кадров при смене скорости подачи; ¨ автоматическое поддерживание постоянной контурной скорости при мгновенных включениях в работу одной, двух, трех координат; ¨ ручное управление оператором с шагом Структура БЗС (см. рис. 9.10) С перфоленты код скорости подачи записывается в буферный регистр ввода информации. В рабочем регистре находится выполняемый кадр управляющей программы. Наличие двух регистров позволяет заблаговременно записать и подготовить очередной кадр с перфоленты во время исполнения записанного кадра в рабочем регистре. Схема сравнения по коду задания скорости подачи и коду с выхода цифрового задатчика интенсивности вырабатывает сигнал разрешения на разгон или торможение (интегрирование в цифровом задатчике интенсивности).
Работа интеграторов на базе ПКЧ параллельного действия описана в главе 6. Дополнительный сумматор в преобразователе код – частота предназначен для того, чтобы обеспечить постоянство контурной скорости. Если в выходном блоке накопилось три импульса на выход по трем координатам (регистры X, Y, Z, см. рис. 9.12), то Импульсы с выходного блока по осям выдаются, как показано на рис. 9.11. Добавляя На структуре БЗС (см. рис. 9.10) указан модуль торможения, который определяет момент начала торможения в конце кадра. Для этого используется несколько информационных сигналов. В регистре КОК (конец отработки кадра) в начале кадра записывается максимальное перемещение, которое задано по одной из координат X, Y, Z. По мере выдачи импульсов по этой координате из регистра КОК вычитаются единицы. После выдачи всех импульсов регистр выдает сигнал КОК для начала перехода к выполнению следующего кадра. Информация в регистре КОК есть код оставшегося пути до конца кадра. В модуле торможения формируется код величины тормозного пути, необходимого для остановки с заданной скоростью подачи. Принято фиксированное время торможения. Поэтому код заданной скорости подачи однозначно определяет и необходимый тормозной путь. Если оператор вручную изменил скорость подачи, то это учитывается в коде необходимого тормозного пути. Как только код необходимого тормозного пути сравняется с кодом оставшегося пути перемещения, в кадре (регистр КОК) вырабатывается сигнал на начало торможения.
Рис. 9.10. Структура блока задания скорости
Рис. 9.11. Характер выдачи импульсов перемещения выходным
Структура взаимодействия интерполятора, блока задания скорости, выходного блока имеет вид, показанный на рис. 9.12. Реверсивные счетчики X, Y, Z имеют по два триггера и накапливают до 2 импульсов с интеграторов. Если хотя бы в одном счетчике окажутся накопленными два импульса, то дешифратор вырабатывает сигнал ВБ-2, которым останавливает работу интерполятора. Как только поступит очередной импульс с блока задания скорости, так сразу же с счетчиков X, Y, Z выдаются импульсы на координаты (если они были в регистрах X, Y, Z), интерполятор снова запускается до нового переполнения одного из счетчиков X, Y, Z (появления «1» во втором разряде).
Рис. 9.12. Структура совместной работы интерполятора,
Используется в позиционных системах станков и роботов (рис. 10.1), особенно в ранних версиях.
Рис. 10.1. Позиционная кодовая СЧПУ Основное достоинство данной системы – абсолютная система координат, что увеличивает надежность системы из-за отсутствия накопления ошибок со временем. Это достигается за счет кодового датчика положения, работающего в коде Грея. Датчики положения имеют от 12 до 16 разрядов, что позволяет получить высокую точность. 
Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|
 от кадра к кадру;
от кадра к кадру; 
 , т.е. формирование заданий в дискретной форме
, т.е. формирование заданий в дискретной форме  ,
,  ,
,  .
. – в непрерывной форме, где Dy, Dx принимаем положительными (1-й квадрант).
– в непрерывной форме, где Dy, Dx принимаем положительными (1-й квадрант). – в дискретной форме в i-м такте интегрирования.
– в дискретной форме в i-м такте интегрирования. – оценочная функция, т.е ошибка между непрерывной величиной и ее дискретной формой. Движение в очередном такте зависит от знака оценочной функции (рис. 9.8).
– оценочная функция, т.е ошибка между непрерывной величиной и ее дискретной формой. Движение в очередном такте зависит от знака оценочной функции (рис. 9.8).
 ,
,  , имеем
, имеем


 , где
, где  , где
, где  ,
,  – приращения по координатам.
– приращения по координатам. , где
, где  ,
,  – координаты центра окружности.
– координаты центра окружности. ,
,  .
. ,
,  ,
,  , где
, где  – время обработки кадра при
– время обработки кадра при 
 ,
,  ,
,  – угловая скорость движения по окружности.
– угловая скорость движения по окружности.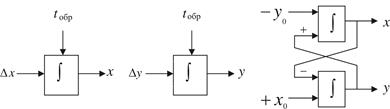
 ,
, 
 в пределах
в пределах  .
. – цифровой код ускорения или замедления.
– цифровой код ускорения или замедления. . Если два импульса, то
. Если два импульса, то  % N сумматора. Если один импульс, то
% N сумматора. Если один импульс, то  % N сумматора.
% N сумматора. , ускоряем выдачу импульсов с выходного блока в
, ускоряем выдачу импульсов с выходного блока в  или
или  раз, чтобы оставить общую контурную подачу в данном такте неизменной (
раз, чтобы оставить общую контурную подачу в данном такте неизменной (  ).
).


