|
|
Динамические коэффициенты влияния
– вектор влияния пробного груза
первый индекс при векторах обозначает номер точки измерения (в данном случае номер подшипника), а второй – номер плоскости коррекции, где установлен пробный груз Теорема Ден-Гартога невесомый ротор с сосредоточенными массами, опирающийся на b подшипников, при любом дисбалансе, как угодно распределенном вдоль его оси, может быть полностью динамически сбалансирован корректирующими массами, размещенными в M=r+b различных плоскостях коррекции по длине ротора, где r соответствует числу собственных форм гибкого ротора. на практике почти полное уравновешивание при всех скоростях может быть получено при балансировке в M=N+b плоскостях, где N число критических частот ротора на жестких подшипниках в диапазоне частот от нуля до четырехкратно превышающей наибольшую рабочую частоту вращения машины. Уравновешивание методом ДКВ
Влияние факторов: 1. Частота вращения увеличивает вероятность срыва в НЧВ 2. Рост температуры масла уменьшает вероятность потери устойчивости 3. Рост давления уменьшает потерю устойчивости (вес ротора, нагруженность опор, расцентровки) Меры защиты: Использование подшипников с лимонной расточкой, сегментных подшипников, с двухклиновой подачей масла Балансировочное оборудование Виды оборудования По типам балансировочных станков Универсальные применяют в серийном производстве для определения дисбалансов роторов различных конструкций. Основными характеристиками таких станков являются допустимая масса и диаметр ротора, расстояние между опорами станка, диапазон частот вращения, мощность привода и точность станка. Станки определенного назначения предназначены для балансировки конкретных элементов – колес автомобилей, вентиляторов, электродвигателей и т.д. – или для определенных видов балансировки – статической, высокочастотной. Эти станки менее универсальны, но рассчитаны на большую производительность. Специальные балансировочные станки используют в крупносерийном и массовом производстве для балансировки роторов определенной массы и геометрии. Балансировочные комплекты предназначены для определения дисбалансов роторов при балансировке в собственных опорах. Устройство станка
Балансировочное устройство является колебательной системой станка, в которой устанавливается и вращается неуравновешенный ротор. По колебаниям этой системы при балансировке судят о дисбалансах ротора. Приводное устройство обеспечивает запуск, поддержание заданной угловой скорости вращения и торможение балансируемого ротора. Основными элементами устройства являются: электродвигатель переменного или постоянного тока, коробка передач, тормоз, приводное соединение. Приводное соединение связывает выходной вал коробки передач с балансируемым ротором. Различают осевое, ленточное и тангенциальное соединения. Осевое соединение осуществляют с помощью карданных валов различной конструкции. В ленточном соединении применяют плоские ремни, охватывающие балансируемую деталь. Касательное или тангенциальное соединение создают прижимными роликами. Измерительное устройство определяет значения и углы дисбалансов роторов в заданных плоскостях. Преобразование параметров колебаний в электрические сигналы производится посредством датчиков. Применяют контактные (индукционные, пьезоэлектрические) и бесконтактные (токовихревые) датчики. Для отметки угла дисбаланса, частоты вращения ротора при балансировке используют в настоящее время преимущественно фотоэлектрические датчики. Опоры станков Тип опор определяется жесткостью опорной системы. При этом именно от опор зависит динамика ротора при уравновешивании. Дорезонансные (жесткие) Резонансные Зарезонансные (податливые) - возможность балансировки любых роторов с высокой точностью во всем заявленном частотном диапазоне, отсутствие накатки шеек, большой диапазон масс балансируемых изделий, отсутствие у станка специального фундамента, малые мощности привода, быстрый монтаж и ввод в эксплуатацию, отсутствие необходимости приобретения дорогих эталонных роторов. Призмы для статической балансировки Поверхность призм должна быть строго горизонтальной, верхняя рабочая поверхность призм и шейки балансировочной оправки должны быть тщательно отшлифованы..
Станки для НЧБ 1, 8 – упоры осевые; 2, 7 – держатели отметчика и указателя; 3 – указатель массы; 4 – скоба; 5 – приводной ремень; 6 – фотоотметчик; 9 – роликовый блок; 10, 18 – опоры; 11 – рама; 12, 16 – стойки; 13 – основание; 14 – привод; 15 – укладчик; 17 – опорный винт
Станки серии ВМ
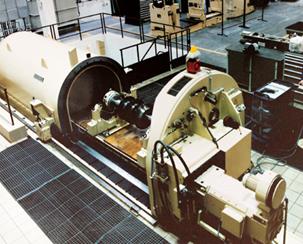
Разгонно-балансировочные стенды
1 Электропривод 2 Коробка передач 3 Промежуточный вал 4 Вакуумный туннель 5 Вакуумная масляная система 6 Вакуумная станция 7 Насосная станция атмосферного масла 8 Аварийный бак с маслом 9 Станция масла высокого давления 10 Шкаф управления 11 Контрольная комната
Виды балансировки Статическая Статическая балансировка – компенсация статического дисбаланса на специальном приспособлении. Применяется для уравновешивания дисков, рабочих колес после механической обработки и после наборки лопаток. Свойство неуравновешенного ротора при отсутствии существенного трения на опорных поверхностях устанавливаться тяжелой точкой вниз. Рабочее колесо размечают на восемь равных частей. В каждой точке последовательно прикладывают такой груз (пластилин, замазка, свинец), который повернул бы рабочее колесо на заданный угол в определенном направлении. По результатам строят график зависимости массы груза от местоположения на рабочем колесе, и, зная массы наибольшего и наименьшего грузов, рассчитывают величину неуравновешенной массы. Устраняют найденный дисбаланс способом, предусмотренным в конструкции детали (шлифовка, сверление, установка грузов в паз и т.д.). Динамическая Динамическая балансировка – балансировка при вращении ротора. • балансировка на низких частотах, • балансировка на РБС во всем диапазоне частот вращения, • балансировка на рабочей частоте вращения в собственных подшипниках. Гибкий ротор – ротор, который сбалансирован на частоте вращения, меньшей первой критической в двух произвольных плоскостях коррекции и у которого значения остаточных дисбалансов могут превышать допустимые на иных частотах вращения вплоть до наибольшей эксплуатационной. Жесткий ротор – ротор, который сбалансирован на частоте вращения, меньшей первой критической в двух произвольных плоскостях коррекции и у которого значения остаточных дисбалансов не будут превышать допустимые на всех частотах вращения вплоть до наибольшей эксплуатационной. Низкочастотная балансировка Балансировка на такой частоте вращения, при которой балансируемый ротор еще можно рассматривать как жесткий. Условно считаем границей частоты (0,3 – 0,5) n1кр. При выборе частоты вращения, на которой выполняется балансировка, необходимо учитывать характеристики балансировочного станка или особенности агрегата (при осуществлении балансировки в собственных подшипниках), способ привода и необходимую мощность привода ротора при балансировке, условия безопасности производства работ и др. Метод балансировки – с использованием ДКВ, чаще всего для двух плоскостей коррекции Балансировка на низких частотах Жесткий ротор Метод трех пусков, выбор мест расположения плоскостей коррекции произвольный Гибкий ротор Динамический прогиб не устраняется, необходимо использование более двух плоскостей коррекции, расположение которых должно определяться формами прогиба данного ротора, возможно использование систем грузов 
Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2024 stydopedia.ru Все материалы защищены законодательством РФ.
|
 Динамический коэффициент влияния (ДКВ), или балансировочная чувствительность, – вектор, определяющий отношение приращения вибрации опоры к вектору пробного груза, вызывающего это приращение.
Динамический коэффициент влияния (ДКВ), или балансировочная чувствительность, – вектор, определяющий отношение приращения вибрации опоры к вектору пробного груза, вызывающего это приращение. – начальная амплитуда вибрации опоры,
– начальная амплитуда вибрации опоры, – амплитуда вибрации той же опоры после установки пробного груза ,
– амплитуда вибрации той же опоры после установки пробного груза , Фаза ДКВ равна углу между направлением действия груза и направлением возбуждаемой им вибрации.
Фаза ДКВ равна углу между направлением действия груза и направлением возбуждаемой им вибрации.



 Ширину рабочей поверхности призмы определяют из условия отсутствия смятия шейки оправки, для роторов массой 1000-2000 кг ширина составляет 7-10 мм. Оправка должна быть тщательно отбалансирована. Длина рабочей части призм должна быть, по крайней мере, в 5 раз больше диаметра оправки
Ширину рабочей поверхности призмы определяют из условия отсутствия смятия шейки оправки, для роторов массой 1000-2000 кг ширина составляет 7-10 мм. Оправка должна быть тщательно отбалансирована. Длина рабочей части призм должна быть, по крайней мере, в 5 раз больше диаметра оправки