
|
|
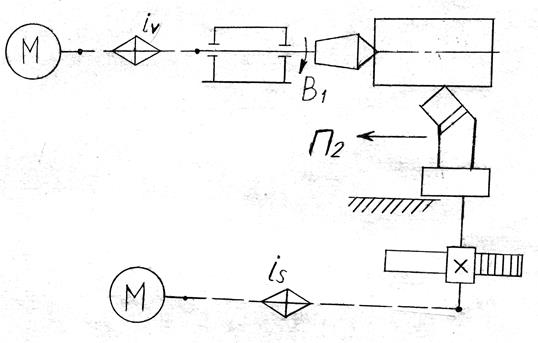
Теоретические основы настройки станковПод кинематической настройкой станка понимают настройку его цепей, обеспечивающую требуемые скорости движений исполнительных органов станка, а также, при необходимости, условия кинематического согласования перемещений или скоростей исполнительных органов между собой. Цель таких согласований – образование поверхности с заданными формой, размерами, точностью и шероховатостью. В большинстве металлорежущих станков с механическими связями для настройки кинематических цепей применяют органы настройки в виде гитар сменных зубчатых колес, ременных передач, вариаторов, регулируемых электродвигателей, регулируемых гидродвигателей, коробок скоростей и подач, характеристикой которых является общее передаточное отношение типа iv, is, ix, iy и т.п. Значение передаточного отношения органа настройки определяется по формуле настройки. Для вывода формулы настройки по кинематической (структурной) схеме намечают расчетную кинематическую цепь, под которой понимают ряд последовательно расположенных передач, включая орган настройки, связывающих исполнительные органы или между собой или с источником движения. По расчетной кинематической цепи составляют уравнение кинематической цепи, в котором неизвестным является передаточное отношение органа настройки. Уравнение кинематической цепи можно записывать от любого конца расчетной цепи. Решение этого уравнения относительно передаточного отношения органа настройки представляет собой формулу настройки. В общем виде формула настройки показывает зависимость его передаточного отношения от переменных параметров условия кинематического согласования перемещений конечных исполнительных органов расчетной кинематической цепи и ее постоянной, т.е.: i = f (с, переменные параметры условия согласования), где i – передаточное отношение органа настройки; с – постоянная уравнения кинематической цепи, зависящая от передаточных отношений промежуточных передач расчетной цепи и постоянных параметров условия согласования перемещений. Формула настройки для каждого конкретного станка – постоянна.
44. Типы и структура приводов главного движения. Раздельный и нераздельный приводы. Механизмы ступенчатого и бесступенчатого изменения скорости. Двигатели приводов главного движения. Привод состоит из двигателя и механизмов, передающих движение рабочим органам. Привод главного движения состоит из источника движения (двигатель) кинематической цепи и органов настройки.
Коробка состоит из групповых и одиночных передач. т. к. они соединены последовательно, то общее количество скоростей коробки равно произведению n числа скоростей элементарных двухваловых передач (т. е. м/у валами II и III число скоростей р1=3; м/у валами IV и V р2=2; z=p1·p2=3·2=6 ступеней). Если в данной схеме применить регулируемый двигатель, то привод будет иметь бесступенчатое регулирование во всем диапазоне скоростей. Кроме коробок скоростей в качестве органов настройки могут использоваться: 1. Ременные передачи со сменными или ступенчатыми шкивами. 2. Передача со сменными зубчатыми колесами (гитара). Применяется в редко переналаживаемых станках, отличаются компактностью.
3. Механизмы бесступенчатого регулирования – вариаторы.
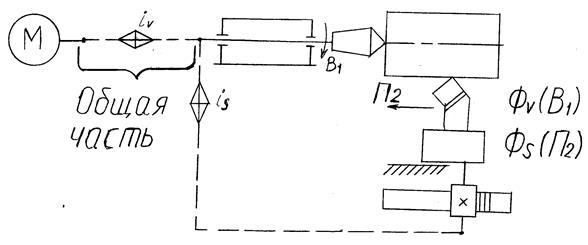
Двигатели применяемые в приводах главного движения: шаговых, постоянного тока (регулируемые), переменного тока (регулируемые, одно- и многоинструментальные), гидро- и пневмодвигатели. Если простую множительную структуру нельзя получить, например, при большом диапазоне скоростей, то применяют привод сложенная структуры, состоящей из 2-х и более кинематических цепей, каждая из которых является обычной множительной структурой. Одна из этих цепей (короткая) предназначена для высоких скоростей привода, другие для низких скоростей. Общее число скоростей: z=z1+z2. Обычно 2 привода имеют общую часть. И если z0 – количество ступеней скорости, которое дает общая часть, то z=z0(zI+zII) zI – число ступеней скорости в скоростной части привода; zII – в тихоходной части привода. Пример соединения множительных групп.
Раздельный и нераздельный привод. Нераздельный привод: движение резания и движение подачи от одного двигателя.
раздельный привод.
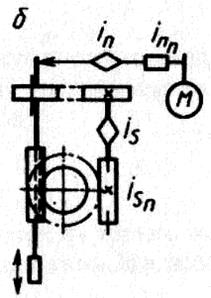
45. Типы и структура приводов подачи. Тяговые механизмы. Двигатели приводов подачи. Приводы малых перемещений. Приводы подач могут быть бесступенчатые и со ступенчатым регулированием. Приводы подачи со ступенчатым регулированием применяют в универсальных станках неавтоматизированных станках, а также в редко переналаживаемых автоматах и полуавтоматов. Токарно-винторезные, вертикально-сверлильные, зубофрезерные, зубодолбежные станки имеют приводы подачи, кинематически связанные с главным приводом (т. е. нераздельные).
Фрезерные и другие станки имеют привод с отдельным электродвигателем.
Для изменения подачи применяют коробки передач с передвижными колесами или автоматизированные коробки с электромагнитными муфтами, сменные зубчатые колеса и специальные механизмы.
Коробку Нортона можно включать в цепь подач так, что движение может передаваться от вала I на вал II и наоборот. Это позволяет нарезать как метрические так и дюймовые резьбы.
Однако механизм имеет малую жесткость, часто ломается шпонка. Поэтому такую коробку применяют в небольших токарно-револьверных и сверлильных станках. Механизм типа меандра состоит из нескольких одинаковых зубчатых блоков и передвижной каретки с накидным или передвижным колесом. Зубчатые блоки, за исключением одного, установлены на валах свободно. Передаточные отношения передач образуют геометрический ряд. Преимущества: малые осевые габариты, большой диапазон регулирования; недостатки: пониженная жесткость и износостойкость (т. к. вращаются все колеса). Бесступенчатый привод. Способы регулирования: электрический, гидравлический, комбинированный. Электрическое регулирование заключается в изменении частоты вращения двигателя. Кинематическая схема привода в этом
Регулирование при помощи механических вариаторов.
1.Лобовой вариатор. 2.Торовый вариатор. 3.Вариатор с раздвижными дисками.
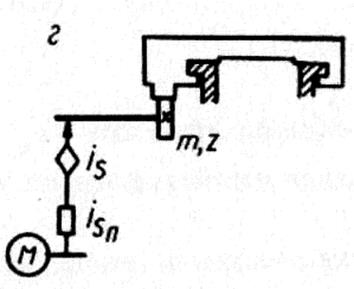
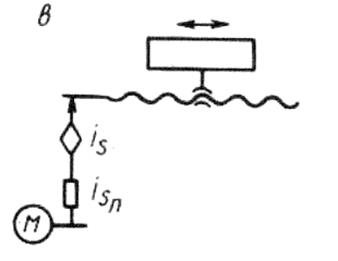
Тяговые механизмы: винт-гайка: скольжения качения; кулачковые механизмы; зубчатое колесо-рейка. Устройства для микроперемещений. Для перемещений с высокой точностью надо устранить скачкообразное изменение силы трения. Это достигается: жидкостным трением; трением качения; применением смазки; наложение вынужденных колебаний; применение специальных тяговых устройств.
2. Магнитострикционный – изменение размеров при намагничивании.
3. Тепловой привод – используется удлинение стержня при нагреве. Недостаток – температурный фактор и большая инерционность. Применяется в редко осуществляемых перемещениях (например в любой автоматической компенсации температурных погрешностей). 
Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2024 stydopedia.ru Все материалы защищены законодательством РФ.
|
 В зависимости от назначения станка, его универсальности, в станках применяются следующие виды приводов: 1. Шестеренчатая коробка, в том числе автоматическая с электродвигателем переменного или постоянного тока. Такой привод реко-мендуется для универсальных станков. 2. Одно- или многоскоростной двигатель переменного тока со сменными шкивами или зубчатыми колесами. 3. Многоскоростной регулируемый двигатель постоянного тока. 4. Одно- или многоскоростной двигатель переменного тока в сочетании с вариатором и шестеренчатой коробкой (обеспечивает бесступенчатое регулирование во всем диапазоне) 5. Шаговые двигатели. 6. Гидропривод. 7. Пневмопривод.
В зависимости от назначения станка, его универсальности, в станках применяются следующие виды приводов: 1. Шестеренчатая коробка, в том числе автоматическая с электродвигателем переменного или постоянного тока. Такой привод реко-мендуется для универсальных станков. 2. Одно- или многоскоростной двигатель переменного тока со сменными шкивами или зубчатыми колесами. 3. Многоскоростной регулируемый двигатель постоянного тока. 4. Одно- или многоскоростной двигатель переменного тока в сочетании с вариатором и шестеренчатой коробкой (обеспечивает бесступенчатое регулирование во всем диапазоне) 5. Шаговые двигатели. 6. Гидропривод. 7. Пневмопривод. Кинематическая структура привода с шестеренчатой коробкой.
Кинематическая структура привода с шестеренчатой коробкой.


 Коробка Нортона: недостатки: недостаточно жесткое и точное сопряжение включенных колес, ненадежная смазка. Преимущество – можно достаточно точно подбирать число зубьев.
Коробка Нортона: недостатки: недостаточно жесткое и точное сопряжение включенных колес, ненадежная смазка. Преимущество – можно достаточно точно подбирать число зубьев. Механизм со встречными конусами колес и вытяжной шпонкой. Преимущества: можно расположить в одной группе до 8-10 передач, применять косозубые колеса для получения точных передаточных чисел, управление всеми передачами при помощи одной рукоятки.
Механизм со встречными конусами колес и вытяжной шпонкой. Преимущества: можно расположить в одной группе до 8-10 передач, применять косозубые колеса для получения точных передаточных чисел, управление всеми передачами при помощи одной рукоятки. случае аналогична схеме привода со ступенчатым регулированием скоростей
случае аналогична схеме привода со ступенчатым регулированием скоростей В приводе может быть использован простой редуктор. Такие приводы получили распространение в станках с ЧПУ. Гидропривод – применяется для прямолинейного движения. Преимущества: широкий диапазон регулирования, быстрое изменение величины и направления скорости, автоматическое предохранение от перегрузок, самосмазываемость. Недостаток – недостаточно жесткая характеристика из-за утечек и влияния температуры на вязкость масла; при малых скоростях работа привода неустойчива.
В приводе может быть использован простой редуктор. Такие приводы получили распространение в станках с ЧПУ. Гидропривод – применяется для прямолинейного движения. Преимущества: широкий диапазон регулирования, быстрое изменение величины и направления скорости, автоматическое предохранение от перегрузок, самосмазываемость. Недостаток – недостаточно жесткая характеристика из-за утечек и влияния температуры на вязкость масла; при малых скоростях работа привода неустойчива.

 Недостатки – нежесткая характеристика и потери на трение. Применяются также для увеличения диапазона регулирования и коробки подач.
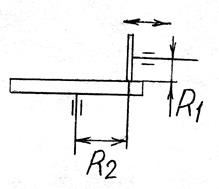
Недостатки – нежесткая характеристика и потери на трение. Применяются также для увеличения диапазона регулирования и коробки подач. Виды тяговых устройств: 1. Схема применяется в шлифовальных станках, позволяет получать перемещение 0,1 мкм (1 – суппорт; 2 – торсион; 3 – силовой механизм).
Виды тяговых устройств: 1. Схема применяется в шлифовальных станках, позволяет получать перемещение 0,1 мкм (1 – суппорт; 2 – торсион; 3 – силовой механизм). Δ = λ·l (λ – коэффициент магнитострикционного удлинения; Δ=8-10 мкм на 100 мм длины). Преимущества – высокая жесткость, возможность управления прямым электрическим сигналом. Недостатки: удлинение зависит от температуры и внешней нагрузки, малое быстродействие. Используется в любой автоматической компенсации.
Δ = λ·l (λ – коэффициент магнитострикционного удлинения; Δ=8-10 мкм на 100 мм длины). Преимущества – высокая жесткость, возможность управления прямым электрическим сигналом. Недостатки: удлинение зависит от температуры и внешней нагрузки, малое быстродействие. Используется в любой автоматической компенсации.