|
|
V – образные характеристики СГ. Регулирование реактивной мощности СГ при параллельной работе с сетьюПри любом изменении тока возбуждения и соответствующем изменении ЭДС V – образные характеристики СГ при
cosφ= ƒ(Iв) имеет вид прямой линии, совпадающей с осью абсцисс. Пунктирная линия BF, проходящая через минимумы V - образных характеристик, представляет собой регулировочную характеристику генератора при чисто активной нагрузке. Вправо от нее лежит область перевозбуждения генератора, влево – область недовозбуждения.
 можно работать на V -образной характеристике от точки «а» до точки «d» и машина не будет перегружена. Левее точки «a» ток якоря будет больше номинального и будет перегреваться статор, правее точки «d» и ток статора и ток обмотка возбуждения больше номинальных и будет перегреваться такжеротора. При нагрузке, равной можно работать на V -образной характеристике от точки «а» до точки «d» и машина не будет перегружена. Левее точки «a» ток якоря будет больше номинального и будет перегреваться статор, правее точки «d» и ток статора и ток обмотка возбуждения больше номинальных и будет перегреваться такжеротора. При нагрузке, равной  (кривая 4), обмотка статора не будет греться только при cosφ=1. (кривая 4), обмотка статора не будет греться только при cosφ=1.
ТЕОРИЯ ЭЛЕКТРОПРИВОДА Основные понятия, элементы кинематической цепи электропривода. Работа системы электропривод – рабочая машина связана с действием разнообразных сил на их моменты. Одни из них приводят систему в движение и называются движущими, а другие наоборот – тормозят её и называются силами (или моментами) сопротивления движению. Источником движущих моментов и моментов сопротивления движению могут быть, как электродвигатель, так и рабочая машина. А поэтому различают: 1) вращающие моменты, развиваемые двигателем; 2) статические моменты рабочих машин; 3) динамические моменты, обусловленные силами инерции, возникающие в разных частях системы при изменении скорости движения . В электроприводе двигатель может работать в двигательном и тормозном режимах, развивая на валу соответственно движущий и тормозной моменты. Двигательным называется режим, при котором двигатель, преобразуя электрическую энергию в механическую, приводит в движение рабочую машину. Тормозным называется режим, при котором вращающий момент двигателя противодействует движению привода. Вращающие моменты двигателя рассматривают как величину алгебраическую. Момент считается положительным, если направление его действия совпадает с направлением движения, и отрицательным, если направление против движения. Поэтому при двигательном режиме момент будет положительным, а при тормозном режиме – отрицательным. Моменты рабочих машин принято называть статическими, так как они вызываются разнообразными статическими силами, к которым относится сила тяжести, силы резания металла, силы сжатия, растяжения, скручивания, трения и др. все статические моменты по характеру действия делятся на активные(потенциальные) и реактивные(пассивные).
Рисунок 1 - Статический момент рабочей машины Активным называется момент, который независимо от направления движения всегда действует в одну сторону. Таким образом, он может быть как тормозным (отрицательным), так и движущим (положительным). Активный момент создается за счет ранее запасенной или полученной извне энергии, и поэтому действует независимо от того, находится ли система в движении или она неподвижна. Примерами активного момента являются моменты, создаваемые весом поднятого груза, силами упругости предварительно сжатых, растянутых, или скрученных упругих тел, силой ветра и т.д.
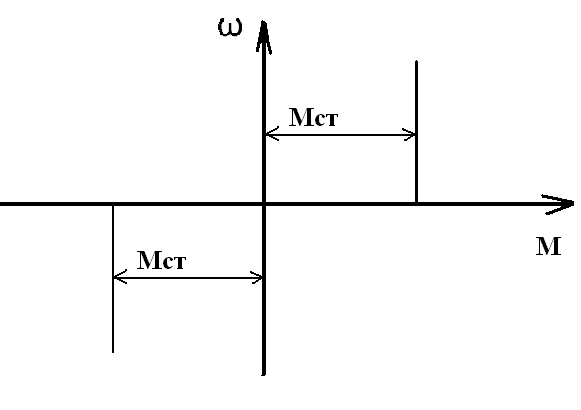
Рисунок 2 -Тормозной и движущий моменты Реактивный момент создается как реакция среды на движение электромеханической системы. Поэтому он действует лишь во время движения и всегда навстречу ему. Таким образом с изменением направления движения реактивный момент изменяет направление действия и во всех случаях является тормозным (отрицательным). Примерами реактивного момента являются моменты сил трения в опорах элементов электромеханических систем, сопротивление жидкости или воздуха на лопастях центробежных насосов и вентиляторов и др.

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2024 stydopedia.ru Все материалы защищены законодательством РФ.
|
 активная мощность
активная мощность  , определяемая мощностью приводного двигателя, должна оставаться постоянной.
, определяемая мощностью приводного двигателя, должна оставаться постоянной. = const ≠ 0 имеют вид кривых 2,3,4, показанных на рисунке 8.15, причем P4> P3> P2> P1. Кривая I на этом рисунке соответствует изменению тока возбуждения при холостом ходе (P1=0).
= const ≠ 0 имеют вид кривых 2,3,4, показанных на рисунке 8.15, причем P4> P3> P2> P1. Кривая I на этом рисунке соответствует изменению тока возбуждения при холостом ходе (P1=0). На каждой из этих характеристик наименьший ток якоря соответствует уровню возбуждения, при котором угол φ=0 . Это чисто активный ток, который и определяет активную мощность генератора в данном режиме. Сдвиг минимумов V – образных характеристик вправо по мере увеличения нагрузки объясняется увеличением падения напряжения в обмотке статора при увеличении тока. Каждой кривой Ia=ƒ(Iв) на рисунке 1 соответствует своя зависимость cosφ=ƒ(Iв), максимум которой совпадает с минимумом V – образной характеристики. Естественно, что при холостом ходе (
На каждой из этих характеристик наименьший ток якоря соответствует уровню возбуждения, при котором угол φ=0 . Это чисто активный ток, который и определяет активную мощность генератора в данном режиме. Сдвиг минимумов V – образных характеристик вправо по мере увеличения нагрузки объясняется увеличением падения напряжения в обмотке статора при увеличении тока. Каждой кривой Ia=ƒ(Iв) на рисунке 1 соответствует своя зависимость cosφ=ƒ(Iв), максимум которой совпадает с минимумом V – образной характеристики. Естественно, что при холостом ходе (  и зависимость
и зависимость