
|
|
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫВ.И. Гаркушенко
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ Практическое руководство к выполнению курсовой работы
Казань 2007 ОГЛАВЛЕНИЕ
1. ЗАДАНИЕ НА КУРСОВУЮ РАБОТУ.. 3 1.1 Cиловые системы автоматического управления. 3 1.1.1 Исходные данные. 6 1.1.2 Техническое задание. 8 1.2 Содержание пояснительной записки. 9 2. ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ.. 10 2.1 Расчет САУ в линейном приближении. 11 2.2 Расчет САУ с учетом нелинейности. 13 3. ПРАКТИЧЕСКИЕ РЕКОМЕНДАЦИИ.. 14 3.1 Введение. 14 3.2 Математическое описание функциональных элементов. 19 3.2.1 Генератор постоянного тока. 20 3.2.2 Тахогенератор. 22 3.2.3 Электромашинный усилитель. 23 3.2.4 Двигатель постоянного тока. 28 3.3 Определение передаточных функций замкнутых систем. 29 3.4 Определения коэффициента усиления электронного усилителя. 32 3.5 Построение области устойчивости по коэффициенту усиления. 33 3.5.1 Алгебраический метод построения области устойчивости. 33 3.5.2 Частотный метод построения области устойчивости. 34 3.6 Построение ЛАХ и ЛФХ разомкнутой системы и определение запасов устойчивости замкнутой системы.. 38 3.7 Построение переходной характеристики замкнутой системы.. 46 3.8 Синтез последовательной коррекции с помощью ЛАХ и ЛФХ.. 47 3.9 Электрическая схема корректирующего устройства. 60 3.10 Синтез дискретного корректирующего устройства. 63 3.10.1 Приближенный синтез дискретного корректирующего устройства. 64 3.10.2 Синтез дискретного корректирующего устройства частотным методом. 68 3.11 Определение параметров автоколебаний. 75 3.12 Исследование системы на абсолютную устойчивость. 81 СПИСОК ЛИТЕРАТУРЫ.. 85 СПИСОК ЛИТЕРАТУРЫ.. 85 ПРИЛОЖЕНИЕ А. Корректирующие цепи. 87 ПРИЛОЖЕНИЕ Б. Коэффициенты гармонической линеаризации нелинейных характеристик. 90 ПРИЛОЖЕНИЕ В. Справочные данные. 92
ЗАДАНИЕ НА КУРСОВУЮ РАБОТУ
Шифр задания на курсовую работу состоит из первой буквы и трех групп цифр, при этом буква означает тип принципиальной схемы одномерной САУ (рис.1-5). Первая группа из четырех цифр означает: первая цифра - № двигателя; вторая цифра – № генератора; третья цифра – № электромашинного усилителя; четвертая цифра – № тахогенератора (таблица 1). Цифра "0" указывает на отсутствие элемента в данной схеме. Вторая группа из трех цифр означает: первая цифра – число, на которое надо поделить значение в первом столбце таблицы 2; вторая цифра – число, которое надо отнять от значения во втором столбце таблицы 2; третья цифра – число, на которое надо поделить значение в третьем столбце таблицы 2. Третья группа из двух цифр, предназначенная для выполнения второй части задания, означает: первая цифра – № нелинейности (рис.6); вторая цифра – число, на которое надо умножить заданное значение параметра Например, для выполнения задания А-1323-212-12 необходимо рассчитать схему А с двигателем № I, с генератором № 3, с электромашинным усилителем №2, с тахогенератором № 3; в соответствии с обозначениями таблицы 2 Cиловые системы автоматического управления
На принципиальных схемах силовых САУ рис.1-5 приняты следующие обозначения: Д – двигатель; Г – генератор; ЭМУ – электромашинный усилитель; ТГ – тахогенератор; > – электронный усилитель; МД – механический дифференциал; Р – редуктор. Для удобства в качестве промежуточных переменных на схемах вместо фактических напряжений приняты э.д.с. выходных сигналов электронного усилителя
Исходные данные
Номинальные данные электрических машин постоянного тока представлены в таблице 1. Таблица 1. Номинальные данные электрических машин постоянного тока
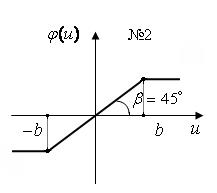
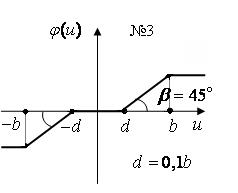
При рассмотрении схем необходимо учесть следующее: 1) Кривые намагничивания всех электрических машин предполагаются линейными в пределах рабочего режима заданных систем, гистерезис отсутствует, реакции электрических машин скомпенсированы. 2) Пренебрежимо малы индуктивности обмоток якорей всех машин. 3) Параметры короткозамкнутой цепи ЭМУ равны 4) Момент инерции ротора двигателя 5) Электронный усилитель с коэффициентом усиления 6) Параметры корректирующей 7) В схеме В сопротивления делителя напряжения 8) В схеме Б параметры управляющей обмотки возбуждения ЭМУ и обмотки обратной связи считать одинаковыми ( для стабилизирующего трансформатора со стальным сердечником приняты следующие параметры: первичная обмотка – вторичная обмотка – взаимная индукция обмоток 9) В схемах Г и Д коэффициенты передачи дифференциала и потенциометра соответственно равны 10) В схеме Д параметры делителя напряжения 11) В схемах Г и Д передаточные отношения редуктора 12) При исследовании влияния нелинейностей на динамику замкнутой системы с найденным законом управления рассматриваются нелинейные элементы с нечетно-симметричными характеристиками № 1,2,3 (рис. 6), включаемые в структурную схему системы перед электронным усилителем и нелинейный элемент № 4 только для схем Г, Д, включаемый перед редуктором двигателя. Здесь нелинейный элемент № 1 типа "зона нечувствительности" характеризует момент трогания двигателя для схем А, Б, Г, Д с параметром
Рис. 6.
1.1.2 Техническое задание
1. По заданным в соответствии с таблицей 2 показателям точности и качества переходных процессов в замкнутой САУ провести синтез непрерывной последовательной коррекции, составить ее электрическую схему, определить параметры корректирующего устройства и место его включения. Таблица 2. Требуемые показатели точности и качества
Здесь показатели качества Для схем А, Б, В значение командного сигнала Для схем А, Б, Г, Д момент нагрузки 2. Рассмотреть возможность замены непрерывной коррекции на дискретное корректирующее устройство при малых периодах дискретности. 3. Провести анализ влияния нелинейного элемента на динамику замкнутой системы при отсутствии входного сигнала и нагрузки с использованием метода гармонической линеаризации или метода абсолютной устойчивости.
Содержание пояснительной записки
Пояснительная записка (объемом не более 40 страниц) оформляется в соответствии с ГОСТ 7.32-2001 [31]. Рекомендуется оформление работы в Microsoft Word с использованием электронной версии данного пособия, с набором математических формул в редакторе Math Type 5.2, который прилагается к электронной версии данного пособия наряду с другими литературными источниками. Пояснительная записка содержит: · титульный лист (с названием задания и его шифром); · содержание; · введение; · основная часть; · заключение; · список использованных источников; · приложения. В пояснительной записке приводятся результаты расчетов в соответствии с порядком выполнения работы, описанного в разделе 2. При этом названия пунктов выполнения работы, выделенных курсором, входят в содержание пояснительной записки. В заключении приводятся основные результаты, полученные в работе. В приложение рекомендуется выносить программы расчета на выбранном алгоритмическом языке, схемы моделирования (например, в системах MATLAB, SIMULINK), графики логарифмических характеристик и т.п. Переходные процессы, иллюстрирующие результаты вычислений, следует приводить в тексте основной части пояснительной записки.
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ Введение. Во введении необходимо привести: · схему системы управления, исходные данные в соответствии с шифром задания и принятыми допущениями в п.п.1.2; · краткое описание работы схемы; · функциональную схему системы; · классификацию по принципу регулирования [2, с.21-34; 3, с.9-14; 4, с.30]; · определение статизма (астатизма) системы по отношению к возмущению нагрузки и команде вида I. Расчет САУ в линейном приближении II. Расчет САУ с учетом нелинейности На первом этапе проводится расчет САУ в линейном приближении без учета имеющихся нелинейностей; на втором этапе – расчет системы при наличии одного нелинейного элемента. Расчеты проводятся с использование ПЭВМ. 
Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|
 .
. с,
с,  %,
%,  В; в задании на нелинейную часть использовать нелинейность № 1 с параметром
В; в задании на нелинейную часть использовать нелинейность № 1 с параметром  В.
В. , генератора
, генератора  . При этом выходное сопротивление электронного усилителя, сопротивление якоря генератора вынесено во внешнюю цепь.
. При этом выходное сопротивление электронного усилителя, сопротивление якоря генератора вынесено во внешнюю цепь.

 кВт
кВт
 В
В
 А
А
 А
А
 рад/с
рад/с
 кг×м2
кг×м2
 Ом
Ом
 Ом
Ом
 Гн
Гн
 Ом;
Ом;  Гн.
Гн. считается идеальным с бесконечным входным сопротивлением и выходным сопротивлением Rвых=10 Ом.
считается идеальным с бесконечным входным сопротивлением и выходным сопротивлением Rвых=10 Ом. - цепи (в схемах А, В):
- цепи (в схемах А, В):  =4000 Ом,
=4000 Ом,  Ом,
Ом,  мкФ.
мкФ. кОм; сопротивление нагрузки
кОм; сопротивление нагрузки  Ом.
Ом. ,
,  ,
,  );
); Ом,
Ом,  Гн;
Гн; Ом,
Ом,  Гн;
Гн;  Ом (дополнительное сопротивление);
Ом (дополнительное сопротивление); .
. =1,
=1,  =114,6 В/рад.
=114,6 В/рад. кОм,
кОм,  кОм.
кОм. и платформы
и платформы  соответственно равны
соответственно равны  ,
,  .
. В; нелинейный элемент № 2 типа "насыщение" определяет ограничение управляющего напряжения на выходе электронного усилителя, связанного с величиной напряжения питания, с параметром
В; нелинейный элемент № 2 типа "насыщение" определяет ограничение управляющего напряжения на выходе электронного усилителя, связанного с величиной напряжения питания, с параметром  0 В; нелинейный элемент № 3 типа "зона нечувствительности - насыщение" сочетает свойства двух первых нелинейных элементов с параметром
0 В; нелинейный элемент № 3 типа "зона нечувствительности - насыщение" сочетает свойства двух первых нелинейных элементов с параметром  рад.
рад.

 , с
, с
 , %
, %
 и возмущению
и возмущению  )
)
 )
)
 В; для схем Г, Д командный сигнал
В; для схем Г, Д командный сигнал  ,
,  рад/с.
рад/с. ,
,  (и
(и  для схем Г, Д) методом от противного. Расчет САУ состоит из двух этапов:
для схем Г, Д) методом от противного. Расчет САУ состоит из двух этапов: