|
|
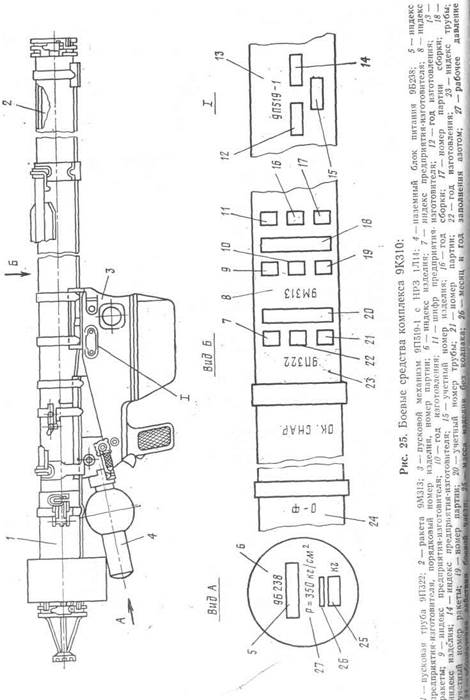
Тактико-технические характеристики И-1Ракета 9М313 Калибр, мм........................................................ 72,1 Масса снаряженной ракеты, кг.................. 10,8 Средняя скорость полета на марше (при 15°С), м/с.................................................................. 570 Метод наведения............................................... Пропорциональное сближение Система управления ...................................... Одноканальная Тип головки самонаведения .................. Тепловая, пассивная Максимальный угол пеленга ТГС, град . . ±40 Наземный блок питания 9Б238 Время выхода на режим в интервалах температур, с: от —20 до +50°С...................................... 1 от —20 до —50° С................................... 1,3 Время работы, с Не менее 30 Масса, кг.......................................................... 1,3 Рабочее давление газа в баллоне (при 20°С), кгс/см2 350 ПМ 9П519-1 с НРЗ1Л14 , 9П519 или 9П516 без НРЗ Масса, кг.......................................................... 3 Диапазон рабочих температур, °С .... От —50 до +50 Гарантийный ресурс, пусков..................... 750 Время готовности НРЗ, с............................ 3,5 Максимальная дальность опознания НРЗ, км 5±0,2 Труба 9П322 (9П322-1) Масса, кг.......................................................... 3,25+0'2(0,3) Длина, мм........................................................ 1697±4
5. СОСТАВ, НАЗНАЧЕНИЕ, УСТРОЙСТВО И ПРИНЦИП ДЕЙСТВИЯ ОСНОВНЫХ УЗЛОВ РАКЕТЫ Зенитная ракета 9М313 состоит из скрепленных между собой отсеков: тепловой головки самонаведения / (рис. 26), рулевого отсека 2, боевой части 3 (с входящим в нее взрывателем), маршевого 4 и стартового 5 двигателей и крыльевого блока 6. 5.1. Тепловая головка самонаведения 5.1.1. ТГС предназначена для обеспечения захвата и автосопровождения цели по ее тепловому излучению, измерения угловой скорости линии визирования ракета — цель и формирования сигналов управления ракетой. 5.1.2. ТГС включает в себя три основные системы: координатор цели, контур управления гироскопом и ФСУР. Структурная схема ТГС показана на рис. 27. 5.1.3. В ТГС использован индикаторный гироскопический координатор, осуществляющий прием и преобразование лучистого теплового потока от цели в частотно-модулированный сигнал, содержащий информацию о положении цели относительно оптической оси координатора. 5.1.4.Контур управления гироскопом осуществляет автосопровождение цели и выдает сигнал коррекции гироскопа в ФСУР. ФСУР осуществляет преобразование сигнала коррекции гироскопа, пропорционального угловой скорости линии визирования ракета — цель, с частоты коррекции на частоту вращения ракеты, усиление сигнала по мощности, суммирование с сигналами линеаризации и ДУС, а также подачу управляющего сигнала на РМ.
5.1.6. Координатор цели включает два основных узла: статор и ротор гироскопа. Статор состоит из приклеенных к фланцу катушек: вращения, генератора опорного напряжения, коррекции 5.1.7. Зеркало наклонено таким образом, что при его вращении в исходном положении изображение лучистого потока, сфокусированного оптической системой в тепловое пятно малого размера, сканирует в плоскости модулирующего растра по окружности. имеющей диаметр, равный примерно половине диаметра растра. 5.1.8. Модулирующий растр прерывает лучистый поток за счет прозрачных и непрозрачных участков диска. Модулированный лучистый поток попадает на фотоприемник (ФП) и преобразуется в электрический сигнал, параметры которого зависят от взаимного расположения ракеты и цели. 5.1.9. Модуляция потока осуществляется следующим образом. При отсутствии угла рассогласования (Л=0, рис. 28, в) между линией визирования ракета — цель и оптической осью объектива центр растра совпадает с центром окружности сканирования изображения, при этом за время одного оборота изображения на выходе растра получается последовательность тепловых импульсов, длительность которых равна длительности паузы между ними. При попадании тепловых импульсов в указанной последовательности на фотоприемник сигнал на выходе последнего будет иметь вид, изображенный на рис. 28, а. Частота этого сигнала постоянна, так как время прохождения тепловым пятном прозрачных и непрозрачных участков растра одинаково. При наличии угла рассогласования (∆≠0, рис. 28, в) центр окружности сканирования изображения смещается относительно центра растра, на выходе фотоприемника появляется частотно-модулированный сигнал, приведенный на рис. 28, б. Частота этого сигнала непостоянна из-за того, что время прохождения тепловым пятном прозрачных и непрозрачных участков растра неодинаково. Изменение частоты сигнала пропорционально величине углового рассогласования между центром растра и центром окружности сканирования изображения, которая зависит от величины угловой скорости визирования ракета — цель, а фаза модулированного сигнала — от направления этого рассогласования. Этот сигнал усиливается в предварительном усилителе (ПУ) и затем в усилителе несущей частоты (УН) (рис. 27). 5.1.10. В связи с тем что в ТГС используется метод частотной модуляции, сигнал в усилителе несущей частоты ограничивается по амплитуде (так как амплитуда при этом методе не содержит полезной информации) и поступает затем в частотный преобразователь (ПР), выходное напряжение которого меняется в зависимости от частоты сигнала на входе. В амплитудном детекторе (АД) выделяется огибающая модулированного сигнала на частоте вращения гироскопа, которая усиливается в усилителе коррекции (УК) и поступает в катушки коррекции. Наводимое в катушках коррекции электромагнитное поле взаимодействует с магнитным полем ротора гироскопа, в результате чего он прецессирует в сторону уменьшения рассогласования между оптической осью гироскопа и направлением на цель. 5.1.11. Для удержания гироскопа в заарретированном положении служит работающая совместно с усилителем коррекции система арретирования, включающая катушки арретира и усилитель арретира, расположенный в ПМ. Сигнал в обмотках катушек арретира изменяется в зависимости от угла пеленга; предварительно усиленный усилителем арретира ПМ. подается в усилитель коррекции, а затем — в катушку коррекции. Создаваемый в катушке коррекции ток удерживает гироскоп в заарретированном положении. 5.1.12. Для поддержания оборотов ротора гироскопа в требуемых пределах (на частоте f2) служит блок подкрутки. 5.1.13. Управление рулями ракеты осуществляется с помощью ФСУР. На фазовый детектор (ФД) ФСУР подаются два сигнала: сигнал коррекции, пропускаемый через узкополосный избирательный синхронный фильтр (СФ), с опорным сигналом от обмотки арретира (на частоте f2) и сигнал с генератора опорного напряжения (на частоте f2 плюс частота вращения ракеты). Дополнительно для ограничения резко изменяющихся сигналов управления ракетой используется ограничение сигнала коррекции, поступающего в ФСУР, с помощью динамического ограничителя (ДО) с входным сигналом от синхронного фильтра (СФ). В фазовом детекторе происходит смешивание этих сигналов, с выхода активного фильтра снимается сигнал управления на частоте вращения ракеты. Для обеспечения пропорционального управления ракетой применяется линеаризация с помощью дополнительного периодического воздействия. Такое воздействие вырабатывается генератором линеаризации в виде напряжения синусоидальной формы. Кроме того, для стабилизации процесса наведения в контуре ФСУР используется сигнал с ДУС, который суммируется с сигналом управления и сигналом линеаризации. Суммарный сигнал усиливается в усилителе мощности (УМ) и поступает в катушки РМ. Для формирования сигналов управления ракетой на начальном участке наведения используется блок управления (БУ), сигнал на который поступает с катушки арретира. 5.1.14. В ТГС применяется инверсионный охлаждаемый фотоприемник. Требуемая чувствительность фотоприемника достигается за счет применения системы охлаждения. В качестве рабочего хладоагента используется газ, переходящий из газообразной фазы в жидкую при дросселировании в системе охлаждения ТГС. 5.2. Рулевой отсек 5.2.1. Рулевой отсек предназначен для размещения аппаратуры управления полетом ракеты. В корпусе рулевого отсека размещены: рулевая машинка 2 (рис. 29) с рулями 8; бортовой источник питания, состоящий из турбогенератора 6 и стабилизатора-выпрямителя 5; датчик угловых скоростей 10; усилитель 1; пороховой аккумулятор давления 4;
пороховой управляющий двигатель 3; розетка 7 (с блоком взведения); дестабилизатор 9. 5.2.2. Рулевая машинка предназначена для аэродинамического управления ракетой в полете. Она является газовым усилителем управляющих электрических сигналов, поступающих с ТГС, и одновременно служит распределительным устройством в системе газодинамического управления на начальном участке траектории. Рулевая машинка состоит из обоймы 4 (рис. 30), в приливах которой расположены рабочий цилиндр с поршнем 19 и фильтр 5 тонкой очистки. В обойму запрессован корпус 2 с золотниковым распределителем. Золотниковый распределитель состоит из четырехкромоч-ного золотника 15, двух втулок 16 и якорей 18. В корпусе размещены две катушки 17 и 20 электромагнитов. Обойма имеет две проушины, в которых на подшипниках 9 расположена стойка 5 с пружинами (рессорой) и с напрессованным на нее поводком 12. В пазах поводка и стойки расположены рули 6, которые в полете удерживаются в раскрытом положении стопорами 7 и пружинами 10, 11. В приливе обоймы между проушинами размещается газораспределительная втулка 14, жестко закрепленная с помощью фиксатора 3 на стойке. На втулке имеется паз с отсечными кромками для подвода газа, поступающего от ПУД к каналам Б, В и соплам 13. Рулевая машинка работает от газов ПАД, которые по трубке через" фильтр тонкой очистки поступают к золотнику и от него по каналам в кольцах, корпусе и обойме под поршень. Командные сигналы с ТГС поступают поочередно в катушки электромагнитов РМ. При прохождении тока через правую катушку 17 электромагнита якорь 18 с золотником притягиваются в сторону этого электромагнита и открывают проход газа в левую полость рабочего цилиндра под поршень. Под давлением газа поршень перемещается в крайнее правое положение до упора в крышку. Перемещаясь, поршень увлекает за собой выступ поводка и поворачивает поводок и стойку, а вместе с ними и рули на угол 15° (от нейтрального положения). Газораспределительная втулка 14, закрепленная на стойке, также поворачивается, при этом отсечная кромка открывает доступ газа от ПУД через канал к соответствующему соплу. Одновременно газ поступает в рабочую полость под подвижную втулку 16 с левой стороны, создавая усилие, стремящееся вернуть якорь с золотником в нейтральное положение. Но это усилие меньше силы притяжения якоря электромагнитом и, пока по правой катушке проходит ток, якорь с золотником будут находиться в правом положении. При прохождении тока через левую катушку 20 электромагнита поршень перемещается в крайнее левое положение. В момент переключения тока в катушках, когда усилие, создаваемое пороховыми газами, превышает силу притяжения электромагнита, золотник под воздействием силы пороховых газов перемещается, причем перемещение золотника начинается раньше, чем происходит нарастание тока в другой катушке, что повышает быстродействие РМ. 5.2.3. Бортовой источник питания предназначен для электропитания аппаратуры ракеты после пуска. Источником энергии для него является газ от работы ПАД. БИП состоит из двух самостоятельных блоков: турбогенератора и стабилизатора-выпрямителя.
Турбогенератор представляет собой синхронный однофазный генератор с возбуждением от постоянных магнитов и приводом от одноступенчатой турбинки. Он состоит из статора 1 (рис. 31), ротора 4, на оси которого установлена турбинка 3, являющаяся его приводом. Стабилизатор-выпрямитель служит для преобразования напряжения переменного тока турбогенератора в заданные номиналы постоянных напряжений БИП и поддержания их стабильности как при изменении скорости вращения ротора турбогенератора, так и при изменении тока нагрузки, а также для регулирования скорости вращения ротора при изменении давления газа
на входе в сопло путем создания дополнительной электромагнитной нагрузки на валу турбинки. БИП работает следующим образом. Пороховые газы от ПАД через сопло 2 подаются на лопатки турбинки и приводят последнюю во вращение вместе с ротором; при этом в обмотке статора индуктируется переменная ЭДС, которая подается на вход стабилизатора-выпрямителя. С выхода стабилизатора-выпрямителя постоянное напряжение поступает в ТГС и ДУС. На взрыватель напряжение с БИП поступает после вылета ракеты из трубы и раскрытия рулей РМ. 5.2.4. Датчик угловых скоростей предназначен для формирования электрического сигнала, пропорционального угловой скорости ракеты относительно ее поперечных осей. Этот сигнал используется для демпфирования угловых колебаний ракеты. ДУС представляет собой рамку 1 (рис. 32), состоящую из двух обмоток, залитых эпоксидным компаундом, которая на полуосях 2 подвешена на центровых винтах 3 с корундовыми подпятниками 4 и может прокачиваться в рабочих зазорах магнитной цепи, состоящей из основания 5, постоянного магнита 6 и башмаков 7. Съем сигнала с чувствительного элемента ДУС — рамки осуществляется через посредство гибких безмоментных растяжек 8, распаянных на контакты 10 рамки и контакты 5, электрически изолированные от корпуса. ДУС устанавливается в ракете таким образом, чтобы его ось X—X совпадала с продольной осью ракеты. При вращении ракеты только вокруг продольной оси рамка под действием центробежных сил устанавливается в плоскости, перпендикулярной оси вращения ракеты. Перемещение рамки в магнитном поле не происходит, и ЭДС в ее обмотках не наводится. При наличии колебаний ракеты относительно ее поперечных осей происходит перемещение рамки в магнитном поле. Наводимая в обмотках рамки ЭДС пропорциональна угловой скорости колебаний ракеты. Частота сигнала соответствует частоте вращения ракеты относительно продольной оси, а фаза — направлению вектора угловой скорости ракеты. Синусоидальный сигнал, снимаемый с контактов 1—2 сигнальной обмотки ДУС, подается на усилитель, часть усиленного сигнала подается на контакты 3—4 демпфирующей обмотки для | успокоения колебаний рамки. 5.2.5. Усилитель предназначен для усиления выходного сигнала ДУС. Конструкция усилителя представляет собой отдельный блок, залитый пенополиуретаном. Пороховой аккумулятор давления предназначен для питания пороховыми газами РМ и БИП. ПАД состоит из корпуса 1(рис. 33), представляющего собой камеру сгорания, и фильтра 3,предназначенного для очистки газа от твердых частиц. Расход газа и параметры внутренней баллистики определяются отверстием дросселя 2. Внутри корпуса ПАД размещаются пороховой заряд 4 и воспламенитель 7, состоящий из электровоспламенителя 8, навески 5 пороха и петарды 6.
ПАД работает следующим образом. Электрический импульс с электронного блока ПМ поступает на электровоспламенитель, воспламеняющий навеску пороха и пиротехническую петарду, форс пламени которых воспламеняет заряд. В фильтре пороховые газы очищаются и поступают в РМ и турбогенератор БИП. 5.2.7. Пороховой управляющий двигатель предназначен для газодинамического управления ракетой на начальном участке траектории. ПУД состоит из корпуса 2 (рис. 34), представляющего собой камеру сгорания, и переходника 1. Внутри корпуса расположены пороховой заряд 3 и воспламенитель 7, состоящий из электровоспламенителя 6, навески 4 пороха и пиротехнической петарды 5. Расход газа и параметры внутренней баллистики определяются дроссельным отверстием в переходнике.
ПУД работает следующим образом. После раскрытия рулей РМ электрический импульс с конденсатора взведения поступает на электровоспламенитель 6, воспламеняющий навеску 4 пороха и петарду 5, форс пламени которых воспламеняет пороховой заряд3. Пороховые газы, проходя через расределительную втулку и два сопла, расположенные перпендикулярно плоскости рулей РМ, создают управляющую силу.
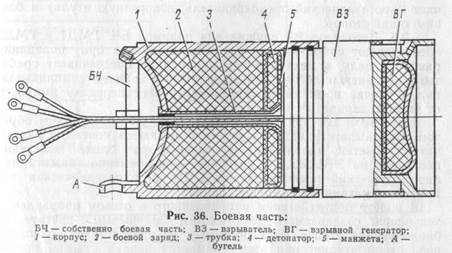
5.2.8. Блок взведения состоит из конденсаторов взведения С1 и С2 (рис. 35), резисторов R1 и R2 для ограничения тока в цепи 5.2.9. Розетка осуществляет электрическую связь ракеты с пусковой трубой. Она имеет основные и контрольные контакты, а также размыкатель, предназначенный для подключения конденсаторов С1 и С2 блока взведения к электровоспламенителям ЭВ1ВЗ, ЭВ ПУД и коммутации плюсового вывода БИП к ВЗ после вылета ракеты из пусковой трубы и раскрытия рулей РМ. 5.2.10. Дестабилизатор требований по устойчивости 5.3. Боевая часть 5.3.1. Боевая часть предназначена для поражения воздушной цели или нанесения ей повреждений, приводящих к невозможности выполнения боевой задачи. Поражающим фактором БЧ, воздействующим на цель, является фугасное действие ударной волны продуктов взрывчатого вещества БЧ и остатков топлива ДУ, а также осколочное действие элементов, образующихся при взрыве БЧ и дроблении корпуса. БЧ состоит из собственно боевой части (рис. 36), контактного взрывателя и взрывного генератора. БЧ является несущим отсеком ракеты и конструктивно выполнена в виде неразъемного соединения.
Собственно БЧ (осколочно-фугасного действия) предназначена для создания заданного поля поражения, воздействующего на цель после получения от ВЗ инициирующего импульса. Она состоит из корпуса 1, боевого заряда 2, детонатора 4 и трубки 3, через которую проходят провода от ВЗ к рулевому отсеку ракеты. На корпусе имеется бугель А, в отверстие которого входит стопор трубы, предназначенный для фиксации ракеты. 5.3.2. Взрыватель предназначен для выдачи детонационного импульса на подрыв заряда БЧ при попадании ракеты в цель или по истечении времени самоликвидации, а также для передачи детонационного импульса от заряда БЧ к заряду ВГ. 5.3.3 ВГ предназначен для подрыва несгоревшей части топлива маршевого заряда ДУ и создания дополнительного поля поражения. Он представляет собой чашку с запрессованным в нее составом взрывчатого вещества, расположенную в корпусе ВЗ. 5.3.4 ВЗ (электромеханического типа) имеет две ступени предохранения, которые снимаются в полете, что обеспечивает безопасную эксплуатацию комплекса при пусках, техническом обслуживании транспортировании и хранении. ВЗ состоит из предохранительно-детонирующего устройства (ПДУ) (рис 37), механизма самоликвидации, трубки, конденсаторов С1 и С2 основного датчика цели ГМД1 (импульсного вихревого магнитоэлектрического генератора), дублирующего датчика цели ГМД2 (импульсного волнового магнитоэлектрического генератора) пускового электровоспламенителя ЭВ1, двух боевых электровоспламенителей ЭВ2 и ЭВЗ, пиротехнического замедлителя, инициирующего заряда, капсюля-детонатора и детонатора ВЗ. 5.3.5 ПДУ служит для обеспечения безопасности в обращении с ВЗ до момента взведения его после пуска ракеты. Оно включает пиротехнический предохранитель, поворотную втулку и блокирующий стопор. 536 Детонатор ВЗ служит для подрыва БЧ. ГМД1 и ГМД2 обеспечивают срабатывание капсюля-детонатора при попадании ракеты в цель, а механизм самоликвидации обеспечивает срабатывание капсюля-детонатора по истечении времени самоликвидации в случае промаха. Трубка обеспечивает передачу импульса от боевого заряда БЧ к ВГ. 537 ВЗ и БЧ при пуске ракеты работают следующим образом При вылете ракеты из трубы замыкаются контакты размыкателя розетки, напряжение с конденсатора блока взведения поступает на ЭВ1 ВЗ, от которого одновременно зажигаются пиротехнический предохранитель ПДУ и пиротехническая запрессовка механизма самоликвидации. В полете под действием направленного в осевом направлении ускорения создаваемого работающим маршевым двигателем, блокирующий стопор ПДУ оседает и не препятствует развороту поворотной втулки; при этом снимается первая ступень предохранения Через 1—1,9 с после пуска ракеты прогорает пиротехнический предохранитель, поворотная втулка под действием пружины разворачивается в боевое положение, ось капсюля-детонатора совмещается с осью детонатора ВЗ, контакты поворотной втулки замыкаются, ВЗ подключается к БИП ракеты. При этом снимается вторая ступень предохранения, ВЗ готов к действию. В то же время продолжает гореть пиротехническая запрессовка механизма самоликвидации, БИП подпитывает конденсаторы С1 и С2 взрывателя на всем протяжении полета. 5 3 8. При попадании ракеты в цель, при прохождении ГМД1 мимо среза металлической преграды, при пробитии или вдоль ее,
при рикошете в обмотке ГМД1 под воздействием вихревых токов, наводимых в металлической преграде при перемещении в ней постоянного магнита ГМД1, появляется импульс электрического тока. Этот импульс подается на ЭВ2, от которого срабатывает капсюль-детонатор, вызывая действие детонатора ВЗ. Детонатор ВЗ инициирует детонатор БЧ, срабатывание которого вызывает разрыв боевого заряда БЧ и взрывчатого вещества в трубке ВЗ, передающей детонацию к ВГ; происходит срабатывание ВГ и подрыв остатков маршевого заряда ДУ при их наличии. 5.3.9. При попадании ракеты в цель срабатывает, кроме того, дублирующий датчик цели ГМД2. Под действием волн упругих деформаций, возникающих в ракете при встрече с преградой, якорь ГМД2 отрывается, происходит разрыв магнитной цепи, в обмотке возникает импульс электрического тока, который подается на ЭВЗ. От луча огня ЭВЗ зажигается пиротехнический замедлитель, время горения которого превышает время, необходимое для подхода основного датчика цели ГМД1 к преграде. При прогорании замедлителя срабатывает инициирующий заряд, вызывая действие капсюля-детонатора, детонатора БЧ, подрыв БЧ и остатков маршевого заряда ДУ при их наличии. 5.3.10. В случае промаха ракеты по цели капсюль-детонатор •срабатывает от луча огня после прогорания пиротехнической залрессовки механизма самоликвидации, вызывая действие детонатора и подрыв БЧ с ВГ для самоликвидации ракеты. Двигательная установка 5.4.1. Твердотопливная ДУ предназначена для выброса ракеты из пусковой трубы, придания ей необходимой угловой скорости вращения, разгона до маршевой скорости и поддержания этой скорости в полете. ДУ состоит из стартового двигателя, двухрежимного однокамерного маршевого двигателя и лучевого воспламенителя замедленного действия. Стартовый двигатель предназначен для выброса ракеты из пусковой трубы и придания ей необходимой угловой скорости вращения. Стартовый двигатель состоит из камеры 8 (рис. 38), стартового заряда 6, воспламенителя 7 стартового заряда, диафрагмы 5, диска 2, газоподводящей трубки 1 и соплового блока 4. Стартовый заряд состоит из трубчатых пороховых шашек, свободно установленных в кольцевом объеме камеры. Воспламенитель стартового заряда состоит из корпуса, в котором помещены электровоспламенитель и навеска пороха. Диск и диафрагма обеспечивают крепление заряда при работе и транспортировании. 5.4.2. Стартовый двигатель стыкуется с сопловой частью маршевого двигателя. При стыковке двигателей газоподводящая трубка надевается на корпус лучевого воспламенителя замедленного действия 7 (рис. 39), расположенного в предсопловом объеме маршевого двигателя. Такое соединение обеспечивает передачу огневого импульса на лучевой воспламенитель замедленного действия. Электрическая связь воспламенителя стартового двигателя с пусковой трубой осуществляется через контактную связь 9 (рис. 38).
5.4.3. Сопловой блок имеет семь сопел, расположенных под углом к продольной оси ракеты, для придания ей угловой скорости вращения на участке работы стартового двигателя. Для обеспечения герметичности камеры ДУ при эксплуатации и создания необходимого давления при воспламенении стартового заряда в сопла устанавливаются заглушки 3. 5.4.4. Двухрежимный однокамерный маршевый двигатель предназначен для разгона ракеты до маршевой скорости на первом Режиме и поддержания этой скорости на траектории на втором Маршевый двигатель состоит из камеры 3 (рис. 39), маршевого заряда 4, воспламенителя 5 маршевого заряда, соплового
блока 6 и лучевого воспламенителя замедленного действия 7. В переднюю часть камеры ввинчивается дно 1 с посадочными местами для стыковки ДУ и БЧ. Маршевый двигатель обеспечивает двухрежимную работу ДУ. Для получения требуемых режимов горения заряд бронирован по всей длине и армирован шестью проволочками 2, а часть заряда оголена по наружной поверхности. Для обеспечения герметичности камеры ДУ при эксплуатации и создания необходимого давления при воспламенении маршевого заряда на сопловом блоке устанавливается заглушка 8, которая разрушается и сгорает от пороховых газов маршевого двигателя. На внешней части соплового блока имеются резьбовые отверстия А для крепления крыльевого блока к двигателю.
5.4.5. Лучевой воспламенитель замедленного действия 7 предназначен для обеспечения срабатывания маршевого двигателя на безопасном для стрелка-зенитчика расстоянии. За время его сгорания ракета удаляется от стрелка-зенитчика на расстояние не менее 5,5 м, что предохраняет его от воздействия струи пороховых газов маршевого двигателя. 5.4.6. Лучевой воспламенитель замедленного действия состоит из корпуса 2 (рис. 40), в котором размещены пиротехнический замедлитель 1, передаточный заряд 4 во втулке 3, в которую с другой стороны впрессован детонирующий заряд 5. От пороховых газов, образующихся в камере стартового двигателя, воспламеняется детонирующий заряд. Ударная волна, образующаяся при детонации, передается через стенку втулки и воспламеняет передаточный заряд, который зажигает пиротехнический замедлитель. От пиротехнического замедлителя поджигается воспламенитель маршевого заряда, который воспламеняет маршевый заряд. Двигательная установка работает следующим образом. При подаче электрического импульса на электровоспламенитель стартового заряда срабатывает воспламенитель стартового заряда, а затем — стартовый заряд. Под действием реактивной силы, создаваемой стартовым двигателем, ракета вылетает из трубы с необходимой угловой скоростью вращения. Стартовый двигатель заканчивает работу в пусковой трубе и задерживается в ней. От пороховых газов, образовавшихся в камере стартового двигателя, срабатывает лучевой воспламенитель замедленного действия, поджигающий воспламенитель маршевого заряда, от которого срабатывает маршевый заряд на безопасном для стрелка-зенитчика расстоянии. Реактивная сила, создаваемая маршевым двигателем, разгоняет ракету до маршевой скорости и поддерживает эту скорость на траектории.
5.5. Крыльевой блок Крыльевой блок предназначен для аэродинамической стабилизации ракеты в полете, создания подъемной силы при наличии углов атаки и поддержания требуемой скорости вращения ракеты на траектории. Крыльевой блок состоит из корпуса 3 (рис. 41), четырех складывающихся крыльев и механизма их стопорения. Складывающееся крыло состоит из пластины /, которая крепится двумя винтами 7 к вкладышам 2 и 8, надетым на ось 4, размещенную в отверстии корпуса 3. Механизм стопорения состоит из двух стопоров 6 и пружины 5, с помощью которой стопора разжимаются и запирают крыло при раскрытии. Крылья раскрываются под действием центробежных сил при вылете вращающейся ракеты из пусковой трубы. Для поддержания требуемой скорости вращения ракеты пластины крыльев развернуты относительно продольной оси крыльевого блока на необходимый угол. Крыльевой блок винтами крепится на сопловом блоке маршевого двигателя. На корпусе крыльевого блока имеются четыре выступа Б для соединения его со стартовым двигателем с помощью разжимного соединительного кольца. 6. НАЗНАЧЕНИЕ И УСТРОЙСТВО ПУСКОВОЙ ТРУБЫ Пусковая труба предназначена для обеспечения прицельного и безопасного пуска ракеты, а также улавливания стартового двигателя. Одновременно она является контейнером при эксплуатации и хранении ракеты. На пусковой трубе закреплены блок 3 (рис. 42) датчиков, механический прицел с лампой световой информации, механизм 19 бортразъема, разъем 17, колодка 13, обоймы 5 и 9, плечевой ремень 8.
Блок датчиков совместно с электронным блоком ПМ предназначен для осуществления разгона ротора гироскопа ТГС. На блоке датчиков крепится антенна 4 НРЗ. Механический прицел размещен на передней 21 и задней 18 стойках и предназначен для прицеливания. На передней стойке закреплена мушка В с отверстием Б. На задней стойке расположены целик Г с лампой 6 светового сигнала информации и диафрагма 7, которая закрывает лампу при пусках в сумерках во избежание ослепления стрелка-зенитчика. Стойки прицела установлены таким образом, что его оптическая ось наклонена по отношению к оси пусковой трубы под углом 10° для придания ракете в момент пуска начального угла возвышения. Это имеет особенно важное значение при пусках по низколетящим целям, так как предотвращает касание ракетой местных предметов и поверхности Земли. Треугольная метка Д служит для ориентации глаза стрелка-зенитчика относительно прицела. Механизм 19 бортразъема состоит из корпуса 31, в котором расположены вилка 30 бортразъема, стопор 25 с пружиной 27, тяга 29 с пружиной 28 и плата 22. В корпусе имеются две проушины 33 и фиксатор 16, с помощью которых к пусковой трубе» стыкуется ПМ. Электрическая связь пусковой трубы с ракетой осуществляется с помощью вилки 30 бортразъема. Штырьевые контакты 23 и направляющие штыри 24 вилки бортразъема входят в соответствующие гнезда розетки ракеты. Механическое крепление ракеты в пусковой трубе обеспечивается стопором 25, который входит в отверстие бугеля А (рис. 36) корпуса БЧ. Расстыковка ракеты и пусковой трубы происходит в такой последовательности. При повороте оычага 35 (рис. 42) механизма накола в направлении стрелки НАКОЛ до упора (на угол 180°) поверхность Л тяги 29 нажимает на стопор 25. Перемещаясь, тяга своим скосом утапливает стопор до совмещения начала скоса К с внутренней поверхностью пусковой трубы. При движении вперед ракета давит на направляющие штыри 24, вилка 30 бортразъема по направляющим И сдвигается вперед и вниз и выходит из зацепления с розеткой ракеты, а стопор утапливается заподлицо с внутренней поверхностью пусковой трубы и фиксируется пружиной 27. Электрическая связь пусковой трубы с ПМ осуществляется с помощью разъема 17, который при транспортировании и хранении ракеты должен быть закрыт съемной крышкой 14, поджимаемой пружиной 15. Электрическая связь пусковой трубы с наземным блоком питания осуществляется с помощью платы 22. Для стыковки наземного блока питания с пусковой трубой в передней части корпуса 31 имеются отверстие М, в которое входит штуцер 11 (рис.44) баллона, и паз Н (рис. 42), в котором размещается зуб штуцера запираемый фиксатором 34. На корпусе механизма бортразъема нанесены стрелки и надписи ИСХОДН, и НАКОЛ, указывающие направление поворота рычага механизма накола при приведении в действие наземного блока питания. Механизм приведения в действие наземного блока питания работает следующим образом. При повороте рычага механизма накола в направлении стрелки НАКОЛ до упора тяга 29 аодвигает-ся и воздействует на боек 14 (рис. 44) баллона, в результате чего происходит прокол мембраны 10. На пусковой трубе крепится колодка 13 (рис. 42) с тремя контактами, к которым подсоединяются провода запальных цепей и провод от экрана контактной связи стартового двигателя. Передний и задний торцы пусковой трубы закрыты соответственно передней 1 и задней 12 крышками с замками 2 и 11. На пусковой трубе нанесены метки А и Е, предназначенные для ориентации замков передней и задней крышек. Плечевой ремень 8 служит для переноса комплекса и крепится на обоймах 5 и 9. Кнопка 32 служит для переключения режимов работы ТГС (с режима НАВСТРЕЧУ на режим ВДОГОН). В связи с тем что пусковая труба допускает многократное использование, в войска могут поступать ракеты в пусковых трубах, на антеннах 4 которых нанесены красные полосы. Число полос указывает на количество пусков, произведенных из данной ПУСКОВОЙ Трубы. на трубе 9П322-1 красные полосы наносятся на блоке датчиков 3. 
Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|