|
|
НАЗНАЧЕНИЕ И СОСТАВ КОМПЛЕКСАТЕХНИЧЕСКОЕ ОПИСАНИЕ ВВЕДЕНИЕ Настоящие Техническое описание и Инструкция по эксплуатации являются основными документами для изучения устройства и правил эксплуатации боевых средств комплекса 9К310 в войсках. В Техническом описании излагаются общие сведения о комплексе, устройство и принцип действия боевых средств комплекса. В Инструкции по эксплуатации излагаются правила боевого применения, технического обслуживания, хранения и транспортирования комплекса. При изучении устройства и правил эксплуатации комплекса необходимо дополнительно пользоваться эксплуатационными документами на планшет 1Л15-1, ПКП 9В837М, 9В866, радиостанцию Р-147,радиоприемник Р-147П и учебно-тренировочными средствами комплекса. В тексте Технического описания приняты следующие сокращения: АРП — автомат разарретирования и пуска; БИП — бортовой источник питания; БЧ — боевая часть; ВГ — взрывной генератор; ВЗ — взрыватель; ДУ — двигательная установка; ДУС — датчик угловых скоростей; ЗИП — запасные части, инструмент и принадлежности; КПА— комплект контрольно-проверочной аппаратуры и вспомогательного оборудования; НРЗ — наземный радиолокационный запросчик; ПАД — пороховой аккумулятор давления; ПКП — подвижной контрольный пункт; ПМ. — пусковой механизм; ПУД — пороховой управляющий двигатель; РМ. — рулевая машинка; РП — радиоприемник; ТГС — тепловая головка самонаведения; ТеО — текущее обслуживание; ТО — техническое обслуживание; ФСУР — формирователь сигналов управления рулями; ЭВ — электровоспламенитель. НАЗНАЧЕНИЕ И СОСТАВ КОМПЛЕКСА Переносной зенитный ракетный комплекс 9КЗ10 предназначен для поражения реактивных, турбовинтовых и винтомоторных самолетов и вертолетов на встречных и догонных курсах в условиях визуальной видимости цели. В состав комплекса входят боевые средства, средства приема целеуказания, средства связи и средства технического обслуживания.
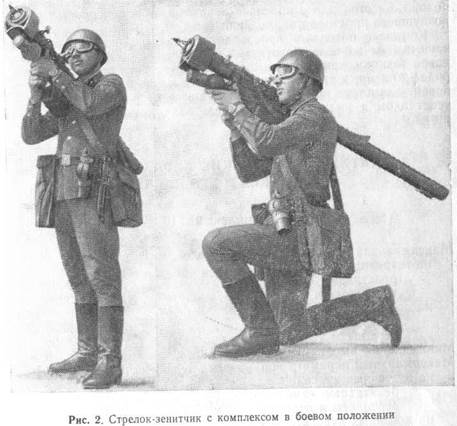
Состав и тактико-технические характеристики боевых средств комплекса приведены в разд. 4. К средствам приема целеуказания относится переносной электронный планшет 1Л15-1, обеспечивающий своевременное оповещение стрелка-зенитчика о месте нахождения и направлении движения воздушной цели. К средствам связи относятся радиостанция Р-147 и радиоприемник Р-147П. К средствам технического обслуживания относятся ПКП9В837М и КПА 9Ф387М, предназначенные для проведения технического обслуживания и регламентных работ с комплексом и его элементами в полевых условиях и на базах (арсеналах). В походном положении боевые средства комплекса переносятся на плечевом ремне за спиной (рис. 1). Пуск ракеты осуществляется стрелком-зенитчиком с плеча из положения стоя или с колена с открытой, обеспечивающей обзор воздушного пространства, позиции (рис. 2). Комплекс позволяет производить пуски из окопа, с позиций, занимаемых на воде, болотистой местности, с объектов бронетанковой техники, движущихся по ровной местности со скоростью не более 20 км/ч, а также с автомашины с места или короткой остановки. Комплекс позволяет осуществлять пуск ракеты стрелком-зенитчиком в индивидуальных средствах противохимической защиты. 3. ТАКТИКО-ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ КОМПЛЕКСА И ЕГО СРЕДСТВ 3.1. Комплекс 9К310 Максимальная высота поражаемых целей, м: на встречных курсах: реактивные самолеты........................................ 2000 вертолеты и поршневые самолеты .... 3000 на догонных курсах: реактивные самолеты........................................ 2500 вертолеты и поршневые самолеты................... 3500 Минимальная высота поражаемых целей, м . . . . 10 Максимальный параметр поражаемых целей, м на встречных курсах: реактивные самолеты................................ Не менее 2000 вертолеты и поршневые самолеты . . . Не менее 2500 на догонных курсах: реактивные самолеты................................ Не менее 2500 вертолеты и поршневые самолеты . . Не менее 3000 Скорость поражаемых целей, м/с: на встречных курсах.......................... . 360 на догонных курсах........................... 320 Наклонная дальность поражения, м . . . . 500—5000 Время готовности к пуску (после выхода на режим наземного блока питания), с . . Не более 5 3.2. Переносной электронный планшет 1Л15-1 Масса, кг............................................................ 6,87 Время приведения в боевую готовность, мин . Не более 3 Время замены источника питания, мин ... Не более 3 Время выхода на режим, с............................... Не более 7 Максимальное расстояние отображения цели от оператора, км............................................. Радиусом 12,8 Число целей, отображаемых одновременно . До четырех Расстояние до передающего пункта, км . . . До 15 Диапазон рабочей температуры, °С .... От —50 до +50 Технический ресурс работы, ч............................ Не менее 5000 Гарантийная наработка (с момента начала эксплуатации), ч.......................................... 500 Примечание. При использовании планшета при минусовой температуре окружающего воздуха приемник и источник питания необходимо располагать под одеждой стрелка-зенитчика. 3.3. Подвижной контрольный пункт 9В837М, 9В866 Время развертывания из походного положе- не более 30 ния в рабочее, мин.................................... Время свертывания, мин................................... 25 Гарантийный ресурс работы (в течение 1000 ч) Не менее 1000 проверок Непрерывная работа (с последующим пере Надежность работы на один отказ .... Не менее 1500 циклов проверок (но не менее 300 ч наработки на один отказ) Среднее время проведения ТО-1 с одним ПМ или регламентных работ с одной ракетой, мин 50 (для 9В866 не более 60) 3.4. Метод наведения ракеты на цель и принцип действия системы управления 3.4.1. Наведение ракеты на цель осуществляется по методу пропорционального сближения, при котором управляющий сигнал пропорционален абсолютной угловой скорости вращения линии визирования ракета — цель. Сущность метода заключается в том, чтобы свести к нулю угловую скорость линии визирования ракета — цель, что позволит обеспечить встречу ракеты с целью в упрежденной точке. 3.4.2. Система управления полетом ракеты предназначена для реализации выбранного метода наведения ракеты на цель. В качестве измерителя угловой скорости линии визирования ракета —цель используется одноканальная гироскопическая головка самонаведения. В основу построения бортовой аппаратуры заложен принцип одноканального управления вращающейся ракетой с работающим в релейном режиме исполнительным органом (РМ), позволяющим, используя вращение ракеты, создавать управляющую силу в любом направлении пространства.
3.4.4. Схемы наведения ракеты на цель по методу пропорционального сближения на догонных и встречных курсах приведены на рис. 3. На начальном участке траектории ракета летит не в упрежденную точку, угловая скорость линии визирования ракета — цель не равна нулю. Тепловая головка самонаведения (ТГС) оценивает эту скорость и пропорционально ее величине формирует команду управления, исполняя которую рули РМ создают управляющую силу в нужном направлении (под управляющей силой понимается аэродинамическая сила на рулях РМ. при их отклонении). Под воздействием аэродинамической управляющей силы ракета начинает разворачиваться относительно центра масс, при этом появляется угол атаки, в результате чего создается результирующая подъемная сила, изменяющая траекторию полета 3.4.5. Схема формирования команд представлена на рис. 4. Ось поворота рулей РМ вращается вместе с ракетой. Управляющая сила направлена перпендикулярно оси поворота рулей РМ. При подаче напряжения только в одну из двух обмоток РМ (рис. 4, а) рули отклоняются и будут находиться в одном из крайних положений, при этом результирующая управляющая сила в процессе одного оборота ракеты будет равна нулю. При подаче напряжения поочередно в каждую из обмоток РМ (рис. 4, б) через пол оборота ракеты рули будут перебрасываться из одного крайнего положения в другое, при этом результирующая сила Rр будет иметь максимальное значение. Направление результирующей силы Rр в пространстве можно изменять, меняя фазу управляющего сигнала. 3.4.6. Для получения пропорциональной зависимости управляющей силы от амплитуды управляющего сигнала в систему управления ракетой введена вынужденная линеаризация синусоидальным напряжением. Сигнал линеаризации Uл, имеющий по отношению к управляющему сигналу UС удвоенную частоту, складывается с управляющим сигналом во ФСУР головки, образуя суммарный сигнал Uсум . С выхода усилителя ФСУР сигнал Uрм (прямоугольной формы) поступает в обмотки РМ. 3.4.7. При отсутствии управляющего сигнала на РМ поступает только сигнал линеаризации (рис. 4,г), при этом рули будут перебрасываться через 90°, результирующая управляющая сила в процессе одного оборота ракеты будет равна нулю. 3.4.8. При наличии управляющего сигнала (рис. 4, д) переброс рулей от суммарного сигнала будет осуществляться за один оборот ракеты четыре раза, но через 90°±∆φ, в результате чего результирующая сила Rр будет пропорциональна амплитуде Uс. Предположим, что управляющая сила Л в начальный момент направлена в сторону точки 1. При вращении ракеты по ходу часовой стрелки управляющая сила Л меняет направление от точки 1 к точке 2 (UСум между точками 1 и 2 не меняет по лярность). В точке 2 происходит переброс рулей (UСум меняет полярность), управляющая сила Л меняет направление от точки 2 к точке 2'. Далее управляющая сила Я меняет направление от точки 2' к точке 3 (Uсум между точками 2' и 3 не меняет полярность). В точке 3 происходит переброс рулей (Uсум меняет полярность), в результате чего управляющая сила R меняет направление от точки 3 к точке 3'. Затем управляющая сила Rменяет направление от точки 3' к точке 4 (Uсум не меняет полярность). В точке 4 происходит переброс рулей (Uсумменяет полярность), в результате чего и управляющая сила Л меняет направление от точки 4 к точке 4'. Далее управляющая сила Л меняет направление от точки 4' к точке 5 (Uсум не меняет полярность). В точке 5 происходит переброс рулей (Uсум меняет полярность), и управляющая сила Л меняет направление от точки 5 к точке 5'. В результате этого за полный оборот ракеты управляющая сила R заполняет площади секторов, ограниченные дугами 1—2, 2'—3, 3'—4, 4'—5. Секторы 2'—1—4' и 4—3'—2 взаимно уравновешиваются. Неуравновешенной остается площадь сектора, ограниченного дугой 4'—2. Величина этой площади зависит от амплитуды [Uс и определяет величину, а ось симметрии неуравновешенного сектора — направление результирующей силы RР. Таким образом, при одноканальном методе формирования команды с введением сигнала линеаризации величина результирующей силы Rр в определенных пределах зависит от амплитуды, а направление — от фазы управляющего сигнала. 3.4.10. Если амплитуда Uс в 1,5—2 раза превышает амплиту- ДУ Uл(рис. 4, е), то переброс рулей будет осуществляться через 3.4.11. Величина результирующей силы Rр характеризуется коэффициентом команды (Кк), под которым понимается степень использования максимальной результирующей силы Rр. Зависи-
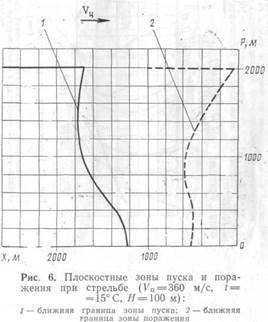
мость Кк от соотношения амплитудных значений Uси Uл приведена на рис. 4, в. 3.4.12. Зависимость направления результирующей силы Rр от фазы приведена в следующей таблице. 3 4.13. Для придания ракете при старте необходимых углов возвышения и упреждения предусмотрен автоматический разворот ее на начальном участке траектории. 3.5. Зоны пускаи поражения 3. 5.1. Зона пуска представляет собой часть пространства, при нахождении цели в которой должен осуществляться пуск ракеты. 3. 5. 2. Зоной поражения называется часть пространства, в пределах которой цель может быть поражена ракетой, если пуск осуществлен в зоне пуска. 3 53 На рис. 5—23 приведены плоскостные зоны пуска и поражения при стрельбе по различным типам целей. На рис. 24 для наглядности приведена пространственная зона пуска. 3 5 4 Пространственные зоны пуска и поражения при стрельое на догонных курсах образуются вращением соответствующей горизонтальной плоскостной зоны вокруг оси X, которая всегда к моменту пуска ориентируется вдоль курса цели. Они строятся с учетом ограничений по максимальной и минимальной высотам полета цели и по максимальному углу пуска ракеты. Пространственные зоны пуска и поражения при стрельбе на встречных курсах представляются горизонтальными плоскостными зонами для нескольких высот. Зоны строятся в системе координат с началом в точке старта ракеты. 3.5.5. Ближняя граница зон пуска и поражения в основном ограничивается: — на встречном курсе — поперечной перегрузкой ракеты; — на догонном курсе — максимальной угловой скоростью слежения при которой ПМ в режиме АВТОМАТ разрешает пуск. 3.5.6. Дальняя граница зон пуска и поражения в основном ограничивается: — на встречном курсе — мощностью излучения от цели, при которой ТГС надежно функционирует в момент старта ракеты; — на догонном курсе — дальностью управляемого полета ракеты лимитируемой ресурсом работы двигателя, и минимально допустимой скоростью ракеты при встрече с целью, обеспечивающей необходимую для срабатывания взрывателя перегрузку. Ограничение по мощности излучения является величиной, зависящей от типа, параметров полета цели и чувствительности ТГС Кроме того, на границы зон пуска оказывают влияние следующие факторы:
_ максимально допустимый угол пеленга ТГС;
минимально допустимая угловая скорость слежения, при которой ПМ в режиме АВТОМАТ разрешает пуск;
— максимально допустимый угол пуска; — время анализа АРП.
3.5.7. Применение схемы формирования дополнительных команд 3.5.8. Максимальный угол пуска ракеты в вертикальной плос 
Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|