
|
|
Произвольная пространственная система сил
Моментом силы
Момент силы
где
Рис. 16 В самом деле, модуль векторного произведения равен
Заметим также, что вектор Моментом силы
Механический смысл величины Момент силы относительно оси z будет иметь знак «плюс», когда с положительного конца этой оси поворот, который стремится совершить сила
Для того чтобы определить момент какой-либо силы
Момент силы относительно оси равен нулю, когда сила параллельна оси либо когда линия действия силы пересекает ось. При рассмотрении равновесия произвольной пространственной системы сил приходится определять моменты пар сил относительно осей, для чего момент пары сил представляют в виде вектора. Момент пары, как вектор, направлен по перпендикуляру к плоскости действия пары в ту сторону, откуда вращение тела парой сил представляется происходящим против направления вращения часовой стрелки. Изображенные на рис. 19, а и 19, б векторы Так как пару сил можно переносить в ее плоскости действия и в любую другую плоскость, ей параллельную, то ее момент
Рис. 19
При определении момента пары сил относительно какой-либо оси достаточно найти проекцию вектора-момента этой пары на данную ось. Так, на примере, изображенном на рис. 19, а и 19, б, будем иметь:
М1х = 0; М1у = М1; М1z = 0;
М2х = 0; М2у = 0; М2z = - M2.
Если требуется сложить пары сил, то достаточно сложить их векторы-моменты как свободные векторы, т. е. перенести эти векторы параллельно самим себе в общую точку и применить правило сложения векторов. Так, на примере двух пар сил
Рис. 20
Модуль М результирующего вектора
или в проекциях на координатные оси:
Mx = M1x + M2x = 0;
My = M1y + M2y = - M2;
Mz = M1z + M2z = M1,
следовательно,
Любую пространственную систему сил можно привести к некоторому центру О, в результате чего будет получен главный вектор
и не зависит от выбора центра приведения, а главный момент
Условиями равновесия произвольной пространственной системы сил являются равенство нулю главного вектора этой системы сил и главного момента относительно любого центра, что выражается шестью уравнениями равновесия в проекциях на оси декартовой системы координат:
Пример С4. Горизонтальная прямоугольная плита весом Р (рис. С4) закреплена сферическим шарниром в точке А, цилиндрическим (подшипником) в точке В и невесомым стержнем DD¢. На плиту в плоскости, параллельной хz, действует сила Дано: Р = 3 кН, F = 8 кН, М = 4 кН×м, a = 60°, АС = 0,8 м, АВ = 1,2 м, ВЕ = 0,4 м, ЕН = 0,4 м. Определить реакции опор А, В и стержня DD'.
Рис. С4
Решение. 1. Рассмотрим равновесие плиты. На плиту действуют заданные силы 2. Для определения шести неизвестных реакций составляем шесть уравнений равновесия действующей на плиту пространственной системы сил:
Для определения моментов силы Из уравнения (23) находим:
Из уравнения (24):
Из уравнения (22):
Из уравнения (19):
Из уравнения (20):
Из уравнения (21):
Ответ: RAx = 3,422 кН, RAу = 5,133 кН, RAz = 4,834 кН, RВx = - 7,422 кН, RВz = 2,13 кН, N = 5,928 кН.
Знак «минус» указывает, что реакция

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|
 относительно центра О называется приложенный в этом центре вектор
относительно центра О называется приложенный в этом центре вектор  , модуль которого равен произведению модуля силы
, модуль которого равен произведению модуля силы 
 - радиус-вектор точки приложения силы.
- радиус-вектор точки приложения силы.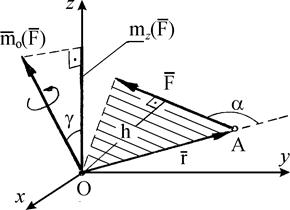


 состоит в том, что она характеризует вращательный эффект силы, когда эта сила стремится повернуть тело вокруг оси z. В самом деле, если разложить силу
состоит в том, что она характеризует вращательный эффект силы, когда эта сила стремится повернуть тело вокруг оси z. В самом деле, если разложить силу  и
и  , где
, где  Составляющая же
Составляющая же  Рис. 18
Рис. 18
 Рис. 17
Рис. 17
 относительно точки О пересечения оси z с плоскостью ху.
относительно точки О пересечения оси z с плоскостью ху.
 и
и  представляют собой соответственно моменты пар
представляют собой соответственно моменты пар  и
и  .
. не имеет определенной точки приложения и является свободным вектором. Такие векторы можно переносить параллельно самим себе в любую точку тела.
не имеет определенной точки приложения и является свободным вектором. Такие векторы можно переносить параллельно самим себе в любую точку тела.


 и
и 

 , приложенный в этом центре и главный момент
, приложенный в этом центре и главный момент  относительно этого центра О. Как известно, главный вектор равен геометрической сумме всех сил:
относительно этого центра О. Как известно, главный вектор равен геометрической сумме всех сил:







 ,
,  ,
,  ,
,  , цилиндрического (подшипника) – на две составляющие:
, цилиндрического (подшипника) – на две составляющие:  ,
,  , (в плоскости, перпендикулярной оси подшипника); реакцию
, (в плоскости, перпендикулярной оси подшипника); реакцию  стержня направляем вдоль стержня от D к D¢, предполагая, что он растянут.
стержня направляем вдоль стержня от D к D¢, предполагая, что он растянут. (19)
(19) (20)
(20) (21)
(21) (22)
(22) (23)
(23) (24)
(24) и
и  , параллельные осям x и z (
, параллельные осям x и z (  ,
,  ), и применяем теорему Вариньона. Аналогично поступаем с реакцией
), и применяем теорему Вариньона. Аналогично поступаем с реакцией  ;
;  ).
).











 направлена противоположно показанной на рис. С4.
направлена противоположно показанной на рис. С4.