
|
|
АНАЛИЗ И СИНТЕЗ СИСТЕМ ЦИФРОВОГО УПРАВЛЕНИЯ12 В данном разделе рассмотрим основные вопросы, связанные с анализом и синтезом систем цифрового управления. В первую очередь обратим внимание на математическую модель объекта управления. При цифровом управлении аналоговым объектом (т. е. объектом управления, движение которого описывается непрерывной функцией времени) в системе используются два дополнительных структурных компонента: экстраполятор или фиксатор (накопитель), преобразующий дискретный сигнал в непрерывный, и дискретный элемент (дискретизатор) — устройство для получения дискретных значений непрерывной величины в определенные тактовые моменты времени. Один из возможных вариантов построения системы цифрового управления, соответствующий представленной на рис. 1.1 (а) непрерывной системе управления с единичной обратной связью, имеет вид, показанный на рис. 1.1(e). Для проведения анализа такой системы управления и синтеза регулятора представим эту структурную схему в виде, изображенном на рис. 1.5. Такая структурная схема соответствует системе цифрового управления аналоговым объектом управления, представленным на рис. 1.6, в дискретные моменты времени. Для получения конкретного представления о характере процессов, протекающих в дискретной системе (рис. 1.6), и выявления ее особенностей важное значение приобретает этап анализа системы цифрового управления.
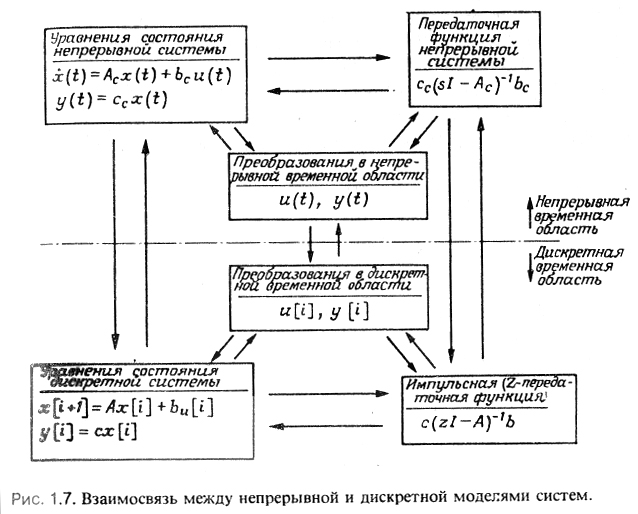
Рассмотрим этот вопрос в плане дискретного моделирования аналоговой (непрерывной) системы. В модели дискретной системы (так же , как и в модели непрерывной системы ) должно найти отражение формализованное представление о внутренней ситуации в виде уравнений состояния системы и внешней ситуации в виде импульсной передаточной функции ( z- передаточной функции ). Очевидна взаимосвязь между представлениями непрерывной ( во времени ) системы управления и дискретной системы управления таким объектом ( рис. 17 ) . Сигнал
В разделе 2.3 подробно рассматриваются вопросы, связанные с введением z-преобразования, его свойствами и их использованием при анализе и синтезе систем методом пространства состояний. Известны два способа построения модели, необходимой для проведения анализа и синтеза цифровой системы управления. Согласно одному из них, модель формируется по известным входным и выходным переменным (математическая модель в дискретной временной области на рис. 1.2). Для этого широко используются многочисленные модификации метода наименьших квадратов, включая обобщенный метод наименьших квадратов, последовательностный метод наименьших квадратов для работы в Реальном масштабе времени и ряд других методов, которые оказываются достаточно эффективными, например, при определении допустимой размерности (порядка) модели и периода выборки (квантования). Очень важное значение при этом имеют вопросы идентификации и моделирования, однако эти вопросы выходят за тематические рамки данной книги. Достаточно подробно, например, они рассмотрены в публикациях <12,13>. Другой способ заключается в составлении дискретной модели по уже полученной непрерывной (аналоговой) модели для заранее определенного периода квантования. Наиболее известны следующие четыре пути решения такой задачи: 1) уравнение состояния непрерывной системы преобразуется в уравнение состояния дискретной системы; 2) уравнение состояния непрерывной системы преобразуется в импульсную (z-передаточную) функцию; 3) передаточная функция непрерывной системы преобразуется в уравнение состояния дискретной системы; 4) передаточная функция непрерывной системы преобразуется в импульсную (z-передаточную) функцию. Последний путь наиболее подробно рассмотрен в многочисленных публикациях, хотя в этом случае непосредственное преобразование передаточной функции непрерывной системы в импульсную (z- передаточную) функцию в явном виде, к сожалению, невозможно. В связи с этим невозможно также представление в достаточно удобном виде зависимости между моделями непрерывной и дискретной систем. В данной книге для дальнейшего изложения материала выбран первый из перечисленных выше путей, исходными для которого являются результаты анализа непрерывной модели объекта управления (подробнее см. в разделах 2.1, 2.2 и 2.4). Так, для аналоговой модели, представленной уравнением состояния (1.3), дискретная модель при заданном периоде квантования Т и с учетом принятых обозначений
имеет вид
где матрицы
Осуществляя z-преобразование в уравнении (1.11), получим z-передаточную (импульсную передаточную) функцию
В качестве примера рассмотрим определение z-передаточной функции для дискретной модели двигателя постоянного тока исходя из полученной после понижения размерности его аналоговой модели при следующих значениях параметров:
Сначала, используя соотношения (1.12), находим значения параметров
Затем, подставляя значения параметров (1.15) в уравнение (1.13), определяем импульсную (z-передаточную) функцию, которая будет иметь вид
Из выражений (1.3) и (1.4) для непрерывной модели, а также приведенных выше двух зависимостей (1.11) и (1.13) становятся ясными и однозначно определенными все взаимосвязи, показанные на рис. 1.7. Подробнее это будет рассмотрено в разд. 2.4. Существенным достоинством такого способа преобразования уравнения состояния непрерывной системы в уравнение состояния дискретной системы являются сравнительная простота и удобство повторного составления дискретной модели при изменении периода дискретизации. Так, в соответствии с выражением (1.16) импульсная г-переда- точная функция для конкретных значений периода квантования Т имеет вид
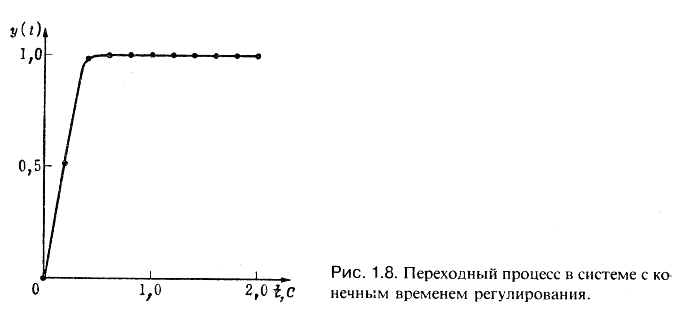
Из этих примеров следует, что, поскольку общий вид z-передаточной функции инвариантен к изменениям величины периода квантования T, а меняются лишь значения ее коэффициентов, проводить повторную идентификацию не требуется. Необходимость исследования свойств дискретной модели, составленной подобным образом, так же как и в случае проектирования непрерывной системы управления, является важной особенностью процесса разработки цифровой системы управления. Этому вопросу посвящена третья глава. Здесь же уместно коснуться только вопроса сохраняемости свойств, присущих непрерывной модели, а именно, если все эти свойства исследованы на непрерывной модели и сохраняются при переходе к дискретной модели, то отпадает необходимость их изучения применительно к дискретной модели. Свойства, присущие непрерывной модели, не обязательно должны перекрывать все свойства дискретной модели. Например, в импульсной z-передаточной функция (1.17) для двигателя постоянного тока имеет место нуль, в точке z = -0,975, отсутствующий у модели непрерывной системы с передаточной функцией G(s). Эти вопросы подробно рассмотрены в третьей главе: разд. 3.1—3.2 посвящены условиям устойчивости, управляемости и наблюдаемости дискретной системы, а в следующем за ними разд. 3.3 исследуется взаимосвязь между периодом квантования Т и свойствами дискретной модели, такими, как расположение нулей и полюсов, устойчивость, управляемость и наблюдаемость. Выше была рассмотрена процедура перехода от непрерывного временного процесса к дискретному. Если определить условия и процедуру обратного перехода, то становится возможным установление взаимно однозначного соответствия между двумя дискретными моделями с различными периодами дискретизации Т1 и Т2. Согласно такому соответствию, дискретная модель с периодом квантования T1 может быть преобразована в непрерывную модель, которая в свою очередь преобразуется в дискретную модель с периодом квантования Т2. Подобное преобразование оказывается очень полезным при выборе микроЭВМ на этапах анализа и синтеза цифровой системы управления, поскольку позволяет проводить оценку функциональных возможностей и технико-экономических показателей микроЭВМ в их взаимосвязи с различными значениями периода дискретизации и требуемыми показателями качества системы управления. Наибольший интерес здесь представляет задача адекватного перехода от ряда дискретных значений переменной на заданном временном интервале к непрерывному представлению этой переменной в данном временном интервале. Решение этой задачи известно в виде теоремы о восстановлении непрерывного сигнала из дискретного, согласно которой устанавливается взаимосвязь между периодом квантования и характеристиками непрерывного сигнала. Практический вывод из этой теоремы сводится к тому, что влияние дискретизации исходного сигнала становится мало ощутимым, если частота квантования по крайней мере в два раза превышает частоту наиболее высокочастотной составляющей спектра исходного непрерывного сигнала. В разд. 3.5 приведена конкретная прикладная методика разработки цифровой системы управления, базирующаяся на этой теореме. В целом же задача адекватного преобразования дискретной модели в непрерывную, представляющая большой интерес для анализа и синтеза цифровой системы управления, рассмотрена в разд. 3.4. Перейдем теперь к этапу синтеза системы цифрового управления. Известны два основных способа решения этой задачи. Первый из них — синтез цифровой системы управления по дискретной модели (этап «синтез дискретной системы» на рис. 1.2), второй — синтез цифровой системы по непрерывной модели, заключающийся в преобразовании синтезированного непрерывного закона управления в цифровой закон управления (этап «цифровое перепроектирование» на рис. 1.2). В .четвертой главе рассмотрены способы и методика разработки оптимального цифрового регулятора, включая решение вопросов, связанных с организацией обратной связи по состоянию системы, наблюдателем, управлением с конечным временем регулирования. В пятой главе рассмотрены принцип организации внутренней модели и последовательность проектирования цифровой следящей системы, а также проектирование системы циклического управления. Эти способы проектирования практически идентичны способу проектирования аналогового регулятора по непрерывной модели (см. этап «синтез системы непрерывного управления» на рис. 1.2). Однако имеется ряд специфических особенностей, которые требуется учитывать при разработке системы цифрового управления. Так, например, если в качестве z-передаточной функции G(z) двигателя постоянного тока принять выражение (1.176), а закон управления выбрать в виде
то рассогласование в системе достигает нулевого значения за определенный промежуток времени (рис. 1.8). Это явление, известное как управление с конечным временем регулирования, не возникает при непрерывном управлении. В четвертой и пятой главах рассмотрена процедура проектирования регулятора с учетом такого рода характерных особенностей цифрового управления. Кроме того, при проектировании любой системы цифрового управления возникает' необходимость определения периода дискретизации на всех этапах идентификации, моделирования или анализа. Однако выбор периода дискретизации, как было отмечено выше, зависит от типа используемой микроЭВМ, функциональных возможностей и технических показателей процессора, а также необходимого объема вычислений при реализации синтезированного закона управления. Так, для системы управления с повышенным быстродействием, например роботом, требуется минимально возможный период квантования. В этом случае допустимо рассматривать вариант проектирования аналогового регулятора по непрерывной модели с последующей его заменой на цифровой регулятор. Однако при этом возможны ситуации, когда система управления, работающая на основе аналогового регулятора, и система управления на базе цифрового регулятора будут функционировать не адекватно.
Это можно проиллюстрировать следующим примером. Пусть в системе, представленной на рис. 1.1(a), передаточная функция G(s) задается выражением (1.8), а передаточная функция G(s) = к, где к — постоянный коэффициент усиления. Тогда передаточная функция замкнутой непрерывной системы будет определяться выражением
Такая система асимптотически устойчива при изменении коэффициента
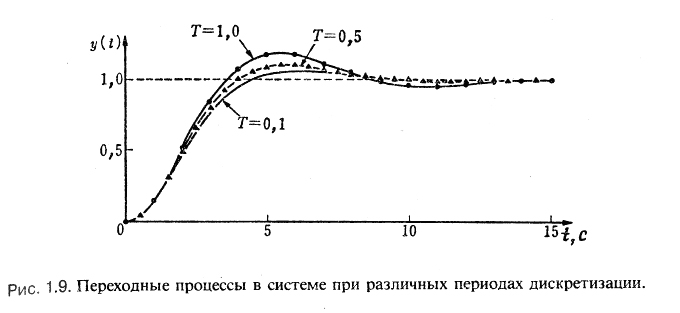
Если эту же систему реализовать в варианте цифрового управления в соответствии со схемой, приведенной на рис. 1.5, и построить графики переходных процессов при конкретных значениях коэффициента В заключение рассмотрим этап реализации цифрового регулятора. Проблемы на этом этапе возникают в связи с уточнением интервала времени, необходимого для проведения требуемого объема вычислений при формировании синтезированного на предыдущих этапах закона управления объектом. При цифровом управлении для определения управляющего воздействия на каждом рабочем такте требуется выполнение соответствующих процедур в виде последовательности арифметических и логических операций процессора, занимающих дополнительное время. Кроме того, определенные затраты времени связаны и с преобразованием сигналов из аналоговой Формы в цифровую и наоборот. Следовательно, возникает необходимость в учете временного запаздывания, связанного с подобными
Рис. 1.10. Переходные процессы в системе при различных периодах дискретизации и учетом временного запаздывания сигнала на один такт. затратами времени, при проведении предыдущих этапов проектирования. Так, если в контур системы, рассмотренной выше, ввести запаздывание на один период дискретизации, то переходные процессы в системе будут носить ярко выраженный колебательный характер (см. рис. 1.10) и система приближается к границе устойчивости. В седьмой главе дан теоретический анализ этой проблемы и приведены основные принципы проектирования оптимального регулятора с учетом запаздывания, вызванного затратами времени на проведение соответствующих вычислительных процедур. Одно из отличий системы цифрового управления от обычной дискретной системы заключается в возможности использования информации, получаемой как в дискретные моменты времени, так и в интервалах между ними. Оптимальному управлению, в котором использована эта особенность, посвящен разд. 7.2. Помимо учета запаздывания (вызванного затратами времени на осуществление вычислительных процедур и преобразования сигналов) на этапе «реализация цифрового регулятора» требуется решение и ряда других проблем, связанных с учетом частичной потери информации при квантовании сигналов, а также с влиянием модификации параметров и параметрической погрешности на характеристики системы (характеристика чувствительности и робастная устойчивость). Продемонстрируем это на простом примере. Пусть в предыдущем примере передаточная функция G(s) содержит некоторый варьируемый параметр b:
Тогда, проведя исследование устойчивости замкнутой системы, заданной структурной схемой на рис. 1.5 при значении параметра В связи с этим в разд. 8.1 исследуется влияние квантования сигнала на показатели качества системы, а в разд. 8.2 изучаются влияния модификации параметров и выбора периода квантования на робастную устойчивость оптимального регулятора. В девятой, заключительной главе на примере задачи стабилизации колебаний маятниковой системы показаны возможности практического применения теоретического материала, изложенного в предыдущих главах. Для удобства восприятия и изучения материала книги авторы ограничились рассмотрением систем управления с одним входом и одним выходом. Однако практически все полученные результаты полностью применимы и для общего случая многосвязных систем с несколькими входами и выходами. Необходимый для этого справочный материал кратко изложен в Приложении, а для более глубокого изучения вопросов, касающихся исследования многосвязных систем управления с многими входами и выходами, рекомендуется обратиться к работам <14 — 24>. Наконец, о принятой в книге системе условных обозначений. При описании непрерывных сигналов и непрерывных систем используются круглые скобки () (например,

12 Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|
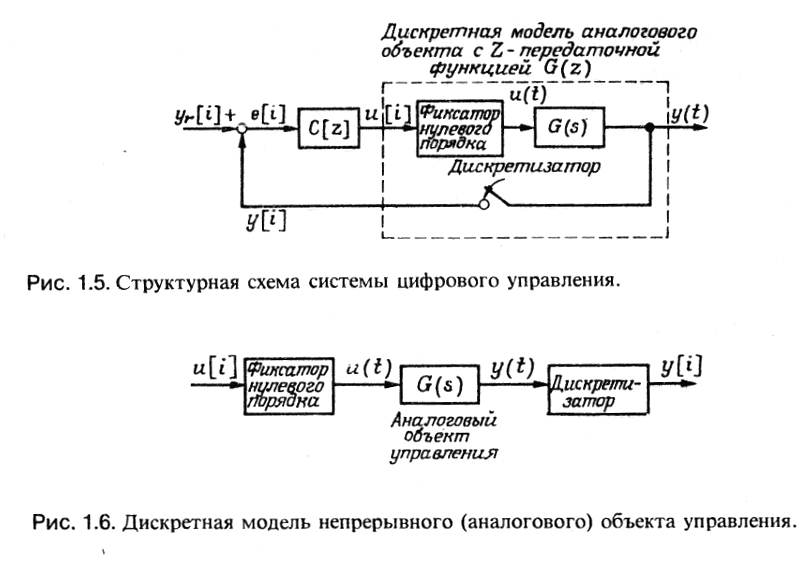
 на выходе дискретной системы ( рис. 1.6) имеет вид временной последовательности
на выходе дискретной системы ( рис. 1.6) имеет вид временной последовательности  , где Т – период квантования ( дискретизации ) сигнала по времени . Для представления такой временной последовательности на комплексной плоскости используется аппарат z- преобразования , дискретное преобразование Лапласа,
, где Т – период квантования ( дискретизации ) сигнала по времени . Для представления такой временной последовательности на комплексной плоскости используется аппарат z- преобразования , дискретное преобразование Лапласа,  . при этом z – преобразование временной последовательности определяется формулой
. при этом z – преобразование временной последовательности определяется формулой  определяется выражением :
определяется выражением :



 определяются соотношениями
определяются соотношениями








 в диапазоне
в диапазоне
 и периодов квантования
и периодов квантования  , то из представленных на рис. 1.9 графиков* видно, что с увеличением периода дискретизации увеличивается колебательность переходного процесса, т. е. с увеличением периода квантования ухудшаются устойчивость и качество системы. В подобных случаях необходима процедура перехода от этапа синтеза непрерывной системы к перепроектированию цифровой системы управления (см. рис. 1.2). С этой целью в шестой главе рассмотрен способ, основанный на аппроксимации характеристик объекта управления либо в частотной, либо во временной областях.
, то из представленных на рис. 1.9 графиков* видно, что с увеличением периода дискретизации увеличивается колебательность переходного процесса, т. е. с увеличением периода квантования ухудшаются устойчивость и качество системы. В подобных случаях необходима процедура перехода от этапа синтеза непрерывной системы к перепроектированию цифровой системы управления (см. рис. 1.2). С этой целью в шестой главе рассмотрен способ, основанный на аппроксимации характеристик объекта управления либо в частотной, либо во временной областях.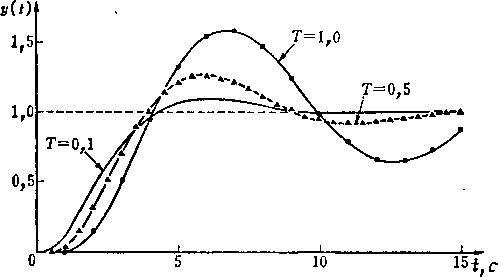

 и различных периодах квантования Г, получим следующие результаты: система с периодом квантования
и различных периодах квантования Г, получим следующие результаты: система с периодом квантования  с устойчива при изменении параметра b в диапазоне
с устойчива при изменении параметра b в диапазоне  , а с периодом квантования
, а с периодом квантования  только в диапазоне
только в диапазоне  .
. и т. д.), а при описании дискретных сигналов и дискретных систем — квадратные скобки [] (например,
и т. д.), а при описании дискретных сигналов и дискретных систем — квадратные скобки [] (например,  и т. д.). В отличие от скалярных величин матрицы обозначаются жирными прописными (заглавными) символами, а вектора — жирными строчными символами. Например, символы А, b и к обозначают соответственно матрицу, вектор и скалярную величину. Единичная матрица n-го порядка записывается как 1n, при этом подстрочный индекс n, указывающий на размерность матрицы, может опускаться там, где это не вызывает недоразумений. Для операций над матрицами (например, матрицей А) приняты следующие дополнительные обозначения:
и т. д.). В отличие от скалярных величин матрицы обозначаются жирными прописными (заглавными) символами, а вектора — жирными строчными символами. Например, символы А, b и к обозначают соответственно матрицу, вектор и скалярную величину. Единичная матрица n-го порядка записывается как 1n, при этом подстрочный индекс n, указывающий на размерность матрицы, может опускаться там, где это не вызывает недоразумений. Для операций над матрицами (например, матрицей А) приняты следующие дополнительные обозначения: — транспонированная матрица А;
— транспонированная матрица А; — детерминант (определитель) матрицы А;
— детерминант (определитель) матрицы А; — присоединенная матрица, т. е. матрица, составленная из алгебраических дополнений матрицы А;
— присоединенная матрица, т. е. матрица, составленная из алгебраических дополнений матрицы А; — ранг матрицы А, наивысший порядок отличных от нуля миноров матрицы А.
— ранг матрицы А, наивысший порядок отличных от нуля миноров матрицы А.