
|
|
Рассчитать привод главного движения станка12 Исходные данные: 1Эскизы детали и техпроцесс обработки. 2 Кинематическая схема механической части привода с указанием геометрических размеров движущихся частей. 3 Принципиальная схема установленного привода и его технические параметры. 4 Перечень требуемых технических параметров привода. Приложение Пример расчета системы подчиненного регулирования тиристорного привода постоянного тока I. Расчет нагрузочной диаграммы электропривода главного движения токарного станка и выбор мощности двигателя. 1.1. Исходные данные для обработки заданной детали (табл. 1) Эскиз заготовки детали представлен на рис. 1 и в таблице 1.
Рис. 1 Обработка детали состоит из 5 операций (по количеству обрабатываемых поверхностей), то для каждой операции (перехода) определим скорость, усилие и мощность резания. Деталь закрепляется в патроне на токарном станке по поверхности 2 и обрабатывается поверхность 4, затем поверхность 3 и подрезается поверхность 5. Посла этого деталь перезакрепляется в кулачковом патроне по поверхности 4 и обрабатывается поверхность 2 а затем подрезается торец 1. Таблица 1
d1=270 мм d2=220 мм 1.2 Определение силы и мощности резания Расчет скорости резания Скорость резания при точении определим по следующей формуле:
где Yv=0.6 – показатель степеней. Расчеты силы резания Силу резания для каждого из переходов определим по формуле
где Результаты вычислений сведены в табл. 2 Расчет мощности произведен по следующей формуле:
Результаты вычислений занесены в таблицу 2 Таблица 2
1.3. Построение нагрузочной диаграммы Находим коэффициент постоянных и переменных потерь
где
Номинальной мощностью принимаем мощность на 4-м переходе P=17.36 кВт. Коэффициент загрузки на каждом переходе определяется по формуле
Результаты сводятся в таблицу 2. КПД на каждом переходе вычисляем по формуле
(данные см. табл. 2) Зная Результаты сводим в таблицу 3. КПД на каждом переходе вычисляем по формуле
(данные см. табл. 3). Зная Машинное время для каждого перехода
где m – количество переходов. Мощность холостого хода двигателя
Если полагать, что двигатель токарного станка не отключается, то нагрузка его в переходы пауз обусловлена потерями холостого хода
Паузы в работе станка определяются по нормативам вспомогательно-подготовительного времени с учетом времени: а) на установку детали; б) промер при продольной и поперечной обточках; в) снятие детали г) управление станком. Применим суммарное время пауз 0,5 мин и распределим его равномерно между переходами, а время, отведенное на снятие и установку новой детали, равное 1 мин, Определяем время цикла
По данным таблицы3 строим нагрузочную диаграмму электродвигателя шпинделя. Табл 3.
Определение мощности двигателя На основании нагрузочной диаграммы электропривода выбираем мощность приводного двигателя. При этом считается, что двигатель при обработке деталей не отключается от сети и вращается с номинальной скоростью, а изменение скорости вращения на переходах осуществляется коробкой передач (или регулируемым выпрямителем). При выборе мощности воспользуемся методом эквивалентной мощности
Условием для выбора мощности двигателя является Выбираем двигатель постоянного тока типа ДП-32; 12³11,2 Технические данные двигателя: Тип………………………………………ДП-32 Мощность………………………………. Напряжение…………………………….. Ток якоря……………………………….. Скорость вращения…………………….. Момент инерции якоря………………… Сопротивления якоря…………………...
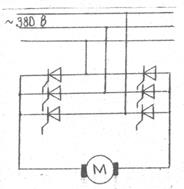
2. Выбор системы электропривода станка Наибольшее распространение для приводов станков получили в последнее время системы "тиристорный преобразователь-двигатель постоянного тока". Система "ТП-ДПТ" имеет ряд преимуществ перед системой "генератор-двигатель": а) отсутствие коллектора и вращающихся частей у преобразователя; б) меньшие капитальные затраты и малый вес; в) более высокое быстродействие, высокий КПД. Поэтому предпочтителен выбор системы "тиристорный преобразователь-двигатель" Согласно заданию, привод должен быть реверсивным. В качестве комплексного преобразователя используем реверсивный привод типа ТПР-69-230 со следующими данными: типовой индекс привода ..................................... 101/15 напряжение двигателя ......................................... U = 220 В ток двигателя не более.......................................... I=100 А коэффициент усиления.......................................... Кв = 22. Проектируемый электропривод является реверсивным приводом с отрицательной обратной связью по скорости. Исходя из оборотов двигателя, выбираем тахогенератор типа ПТ 22/2 со следующими техническими данными: ПТ 22/2 iB=0.35A РН= 0.115 кВт Ив=55 В UH= 230 B hH=64.5 % IH = 0.5 A RЯ=4,7 Ом h = 2400 об/мин Rдоп=2,4 Ом Z = 21 Rсер=7,18 Ом К = 33 Zшунт=127 Ом 3. Расчет силовой схемы привода. 3.1 Расчет параметров силового трансформатора Выбираем схему соединений обмотки силового трансформатора Y/Y Схема подключения тиристоров - трехфазная мостовая полностью управляемая (рис. 2). Теоретическое значение фазной ЭДС вторичной обмотки трансформатора, питающего трехфазный управляемый выпрямитель с нагрузкой на противоЭДС в зоне непрерывных токов;
где КН. = коэффициент схемы; КН = 0,74.
Ud выпряженное напряжение при полностью открытых вентилях, равно 220 В. С учетом необходимого запаса напряжение вторичной обмотки где
Действующее значение тока вторичной обмотки трансформатора
где
Действующее значение тока первичной обмотки
где
Теоретическое значение типовой мощности трансформатора для идеального выпрямителя
где Расчетная мощность трансформатора
На основании расчета выбираем силовой трансформатор типа ТТ-30; Рт = 30 кВт; Y/Y; eK - 5 %; U = 220/230. 3.2. Выбор вентилей Выбор вентилей производим по среднему значению тока, проходящему через вентиль, и по максимальному значению величины обратного напряжения. Среднее значение тока через вентиль
где m = 3 - число фаз питающей сети; Номинальный ток через вентиль
где Максимальная величина обратного напряжения, прикладываемая к вентилю, определяется формулой
где Выбираем тиристор типа Т-50-6. 3.3 Определение расчетных параметров цепи якоря двигателя Расчетное сопротивление цепи якоря определяется по формуле
где Активное сопротивление обмоток трансформатора
где
Индуктивное сопротивление обмоток трансформатора
где Сопротивление, вносимое за счет коммутационных токов;
Сопротивление щеточного контакта
Расчетная индуктивность цепи якоря
где
где К=0,5...0,6 для компенсированных машин; К=0,8...1,2 для некомпенсированных машин.
р =2 – число пар полюсов;
Электромагнитная постоянная времени
Электромеханическая постоянная времени
где
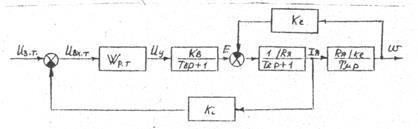
4. Динамический расчет системы электропривода Для построения схемы управления приводом постоянного тока применена система подчиненного регулирования с последовательной коррекцией. Структурная схема тока представлена на рисунке 3.
Рис. 3. Передаточная функция регулирования тока имеет вид:
Постоянная времени
где Передаточная функция регулятора тока определяется так:
где Используем эти данные для расчета параметров интегрально-пропорционального регулятора тока (ПИ-регулятора), схема которого показана на рис. 4.
Рис.4. Благодаря наличию интегральной составляющей в статическом режиме где Постоянная интегрирования регулятора тока, если принять
Зададимся значениями емкости в цепи обратной связи
Постоянная обратной связи ПИ-регулятора Следовательно,
Примем Полагая, что источником сигнала, пропорционального току якоря, является шунт с номинальным током (1Ш н = 150 А) и номинальным падением напряжения ( 1и±.н 'Ки<.=?5н8)9 можно вычислить коэффициент усиления датчика тока:
Перейдем к расчету параметров регулятора скорости. Замыканием цепи обратной связи по скорости и введением в цепь управления регулятора скорости PC с передаточной функцией WPC, получаем второй контур регулирования, структурная схема которого показана на рис.5.
Рис.5 В прямой цепи этого контура представлена передаточная функция замкнутого оптимизированного контура тока. Без учета внутренней связи по ЭДС она имеет вид:
Передаточную функцию объекта регулирования скорости определим, отбрасывая в предыдущем равенстве член второго порядка:
Желаемая передаточная функция разомкнутого контура скорости, если принять
Передаточная функция регулятора скорости РС запишется так:
Следовательно, должен быть применен пропорциональный регулятор (П-регулятор) скорости, схема которого показана на рисунке 4. Примем
где Так как для П-регулятора
где Стабилитроны СТП в цепи обратной связи регулятора скорости, включенные для ограничения его выходного напряжения, должны быть выбраны на напряжение Напряжение В соответствии с принятой структурной схемой САР и рассчитанными значениями коэффициентов передачи и постоянных времени проводим моделирование переходных функций Список рекомендуемой литературы 1. Розман Я.Б.Б Брейтер Б.З. Устройство, наладка и эксплуатация электроприводов металлорежущих станков. - М.: Машиностроение, 1985.- 208 с. 2. Лебедев А.М., Орлова Р.Т, Пальцев А.В. Следующие электроприводы станков с ЧПУ- М.: Энергоатомиздат, 1988.- 233 с. 3. Электромеханические системы управления тяжелыми металлорежущимистанками/В.С. Демидов и др. – Л.: Машиностроение, 1986, -236с. 4. Сафонов Ю.М. Электроприводы промышленных роботов - М.: Энергоатомиздат, 1990. - 176с. 5. Справочник по электрическим машинам: в 2 т./Под общ. Ред. И. П. Копылова, Б.К. Клокова.- М: Энергоатомиздат, 1987. –Т.1.- 645 с. 6. Москаленко В.В. Автоматизированный электропривод. – М.: Энергоатомиздат, 1986.-416с. 7. Системы программного управления промышленными установками и робототехническими комплексами/Б.Г. Коровин и др. - Л: Энергоатомиздат; 1990-352с. 8. Комплектные тиристорные электроприводы: справочник/Под ред. В.М. Перельмутера. – М.: Энергоатомиздат, 1988.*319с 9. Справочник по проектированию автоматизированного электропривода и систем управления технологическими процессами 3-е изд./Под ред. В.И.Круповича и др. – М.: Энергоатомиздат, 1983 -416с. 10. Справочник по автоматизированному электроприводу /Под ред. В.А. Елисева и др., Энергоатомиздат, -1983,- 616 с. 11. Микропроцессоры и микроЭВМ в системах автоматического управления электроприводами. - М: Информэлектро, 1985.-25с. 12. Фанштейн В.Г, Фанштеин Э.Г. Микропроцессорные системы управления тиристорными электроприводами. – М.: Энергоатомиздат, 1986.-240 с. 13. Цифровые электроприводы с тиристорными преобразователями/С.Г. Герман-Галкин и др. – Л.:Энергоатомиздат; 1986.-248с. 14. Михайлов О.П. Динамика электромеханического привода металлорежущих станков. - М.: Машиностроение,-1989.-224 с. 15. Гумен В.Ф., Калинская Т.В. Следящий шаговый электропривод. - Л.: Энергия, 1980.-168с. 16. Перельмутер В.М., Соловьев А.К. Цифровые системы управления тиристорными электроприводами - К.: Техника, 1982.- 106с. 17. Волков Н.И., Миловзоров В.П. Электромашинные устройства автоматики. -2-е изд. - М.: Высш. шк., 1986.-335 с. 18. Юферов Ф.М. Электрические машины автоматических устройств. -2-е изд. – М.: Высш. шк., 1988.-479с. 19. Управление электроприводами Учеб. пособие дли ВУЗов /А, В. Баширин и др. - Л.: Энергоатомиздат; 1982.- 392 с. 20. Левинтов С,Д., Борисов А.М. Бесконтактные магнитоупругие датчики крутящего момента. - М.: Энергоатомиздат; 1984.- 88 с. 21. Итоги науки и техники Электропривод и автоматизация промышленных установок. - М: Наука, 1990.- 208 с. 22. Микропроцессорное управление многоканальными системами высокой томности/Б И. Кузнецов и др. - К.: Техника, 1990 - 208 с. 23. Никольский А.А. вопросы синтеза двухканальных следящих электроприводов с активными упругими пьезокомпенсаторами //Электричество. –1986 -№1.-С. 23-28. 24. Скаржепа В.А., Шелохов К.В. Цифровое управление тиристорными преобразователями. - Л: Энергоатомиздат, 1984.-160 с. 25. Трахтенберг Р.М. Импульсные астатические системы электропривода с астатическим управлением. - М: Энергоатомиздат, 1982.-168 с. 26. Электротехнический справочник: В 3 т./ Под общ. ред. И.К. Орлова и др. -М: Энергоатомиздат, 1985.- Т. 3. -301 с. 27. Сандлер А.С.Электропривод и автоматизация металлорежущих станков. - М.: Высш. шк., 1970.- 247 с. 28. Бурдаков С Ф. и др. Проектирование манипуляторов промышленных роботов и робототехнических комплексов - М.: Высш. шк, 1986.- 264 с. 29. Электронная техника в автоматике. Сборник статей / Под. Ред. Ю.И. Конева. - М.: Сов. радио, 1985. - Вып. 16. -С. 18-30.

12 Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|

 ,
, =190 коэффициент, характеризующий обрабатываемый материал резца: Т=60 мин – стойкость резца; m=0,2; Xv=0.18;
=190 коэффициент, характеризующий обрабатываемый материал резца: Т=60 мин – стойкость резца; m=0,2; Xv=0.18;
 - коэффициент, характеризующий обрабатываемый материал резца и вид токарной обработки коэффициент, характеризующий обрабатываемый материал резца и вид токарной обработки=300; XF=1, YF=0.75, n = 0.15 - показатели степеней.
- коэффициент, характеризующий обрабатываемый материал резца и вид токарной обработки коэффициент, характеризующий обрабатываемый материал резца и вид токарной обработки=300; XF=1, YF=0.75, n = 0.15 - показатели степеней.
 ,
, =0,79 – нормальный КПД станка
=0,79 – нормальный КПД станка
 .
.
 каждого перехода и мощность резания перехода, рассчитаем мощность, приведенную к валу двигателя на каждом из переходов
каждого перехода и мощность резания перехода, рассчитаем мощность, приведенную к валу двигателя на каждом из переходов  (данные расчетов см. табл. 3). По ранее произведенным расчетам определяем число оборотов
(данные расчетов см. табл. 3). По ранее произведенным расчетам определяем число оборотов 
 .
. - диаметр обрабатываемого изделия на каждом переходе.
- диаметр обрабатываемого изделия на каждом переходе. ,
, .
. .
.

 .
.








 - коэффициент запаса по напряжению, учитывающий возможное снижение напряжения в сети, равен 1,1;
- коэффициент запаса по напряжению, учитывающий возможное снижение напряжения в сети, равен 1,1; = 1,2 коэффициент запаса, учитывающий неполное открытие вентилей при максимальном управляющем сигнале a - 90%;
= 1,2 коэффициент запаса, учитывающий неполное открытие вентилей при максимальном управляющем сигнале a - 90%; - 1.05 - коэффициент запаса по напряжению, учитывающий падение напряжения в обмотках трансформатора, вентилях в результате коммутации токов.
- 1.05 - коэффициент запаса по напряжению, учитывающий падение напряжения в обмотках трансформатора, вентилях в результате коммутации токов.
 - коэффициент схемы,
- коэффициент схемы,  = 1,08 - коэффициент, учитывающий отклонение формы тока от прямоугольной;
= 1,08 - коэффициент, учитывающий отклонение формы тока от прямоугольной; - теоретическое действующее значение тока вторичной обмотки;
- теоретическое действующее значение тока вторичной обмотки; - выпрямленный ток.
- выпрямленный ток.
 теоретическое значение тока первичной обмотки;
теоретическое значение тока первичной обмотки; -коэффициент трансформации трансформатора;
-коэффициент трансформации трансформатора;
 - коэффициент схемы, равен 0,815.
- коэффициент схемы, равен 0,815.
 - коэффициент схемы, равен 1,065.
- коэффициент схемы, равен 1,065.


 - коэффициент запаса, выбираемый исходя из надежности работы вентиля и с учетом пусковых токов, равен 1,5.
- коэффициент запаса, выбираемый исходя из надежности работы вентиля и с учетом пусковых токов, равен 1,5.
 - коэффициент схемы, равен 1,065.
- коэффициент схемы, равен 1,065.
 и
и  - сопротивления обмоток якоря и дополнительных полюсов двигателя при 15°С;
- сопротивления обмоток якоря и дополнительных полюсов двигателя при 15°С;  — сопротивление, внесенное за счет коммутации анодных токов;
— сопротивление, внесенное за счет коммутации анодных токов;  - сопротивление обмоток силового трансформатора, приведенного к цепи выпрямленного тока;
- сопротивление обмоток силового трансформатора, приведенного к цепи выпрямленного тока;  - сопротивление щеточного контакта;
- сопротивление щеточного контакта;  - сопротивление ограничивающих реакторов.
- сопротивление ограничивающих реакторов.
 - активная составляющая напряжения к.з. трансформатора,
- активная составляющая напряжения к.з. трансформатора, .
.

 - реактивная составляющая напряжения к.з. трансформатора,
- реактивная составляющая напряжения к.з. трансформатора, 


 - индуктивность обмоток якоря и дополнительных полюсов двигателя
- индуктивность обмоток якоря и дополнительных полюсов двигателя

 - индуктивность рассеяния силового трансформатора, приведенная к контуру двигателя;
- индуктивность рассеяния силового трансформатора, приведенная к контуру двигателя;


 - момент инерции якоря двигателя;
- момент инерции якоря двигателя;  - момент инерции механизма
- момент инерции механизма  - коэффициент, учитывающий момент инерции механической передачи;
- коэффициент, учитывающий момент инерции механической передачи;  - конструктивная постоянная двигателя.
- конструктивная постоянная двигателя.

 приближенно учитывает чистое запаздывание преобразователя и малые инерционности системы управления, поэтому ее можно принять в качестве меры для оценки суммарной постоянной некомпенсированных инерционных элементов контура тока, положив
приближенно учитывает чистое запаздывание преобразователя и малые инерционности системы управления, поэтому ее можно принять в качестве меры для оценки суммарной постоянной некомпенсированных инерционных элементов контура тока, положив  Желаемая передаточная функция разомкнутого контура имеет вид:
Желаемая передаточная функция разомкнутого контура имеет вид:
 =
=  /
/  - соотношение постоянных контура.
- соотношение постоянных контура.


 . Приняв в качестве максимального задающего сигнала значение
. Приняв в качестве максимального задающего сигнала значение  =12 В, определим требуемый коэффициент обратной связи по току
=12 В, определим требуемый коэффициент обратной связи по току 
 .
. (настройка на модульный оптимум):
(настройка на модульный оптимум):
 мкФ и определим сопротивление
мкФ и определим сопротивление  , исходя из выражения постоянной интегрирования Пи-регулятора тока
, исходя из выражения постоянной интегрирования Пи-регулятора тока ;
;


 , тогда
, тогда  , где
, где  - коэффициент датчика тока.
- коэффициент датчика тока.



 , определится из выражения
, определится из выражения

 Определим коэффициент обратной связи по скорости
Определим коэффициент обратной связи по скорости
 - скорость холостого хода,
- скорость холостого хода, 
 , то можно определить сопротивление обратной связи регулятора скорости
, то можно определить сопротивление обратной связи регулятора скорости
 .
. .
. , требуемое для получения заданного значения скорости идеального холостого хода привода
, требуемое для получения заданного значения скорости идеального холостого хода привода  .
. и
и  . По полученным графикам находим показатели качества САР привода.
. По полученным графикам находим показатели качества САР привода.