
|
|
Полюсы статора; 2 – вал с полюсами ротора; 3 – разделительная труба; 4 – катушки; 5 – кожух двигателяНа рисунке 2 представлена схема шагового двигателя с линейным перемещением ротора (ЛШД). При такой конструкции электромагнитная система двигателя непосредственно воздействует на управляющий орган. При этом промежуточные механические передачи отсутствуют. В рассматриваемой конструкции в немагнитный плот-непрочный чехол вварены башмаки статора, на которых имеются поперечные кольцевые пазы. Ротор линейного шагового двигателя набран из чередующихся колец из магнитной и немагнитной стали. Соседние башмаки статора сдвинуты на 1/4 зубцового деления. При поочередном включении секций ротор электродвигателя перемещается линейно, шагами, равными 1/4 зубцового деления, в одну или другую сторону. Двигатель подобной конструкции позволяет перемещать исполнительный орган с постоянной или переменной скоростью без выбегов. Недостатками линейных шаговых двигателей являются невысокая скорость (не более 30 мм/с) и малое тяговое усилие (не более 30—40 кгс-см). Общий вал, а их полюса развернуты относительно полюсов ротора соседних секций на угол 90°/4=22.5° При подаче питания на одну из секций двигателя магнитный поток замыкается в ней через соответствующий ротор, создавая синхронизирующий момент. При поочередном включении питания на секцию, ротор рабочей секции поворачивается на один и тот же угол. ШД является по существу синхронным двигателем, у которого магнитное поле перемещается шагами. Направление вращения ротор (реверс) задается изменением очередности включения секций, а остановка и фиксация - подачей питания постоянной величины на одну из секций. При этом выбег отсутствует. Шаговый двигатель с линейным перемещением ротора представлен на рис.2. В данной конструкции промежуточные механические передачи отсутствуют. Здесь в немагнитный плотноприжатый чехол вварены башмаки статора, в которых имеются поперечные кольцевые пазы. Ротор ЛШД набран из чередующихся колец, выполненных из магнитной и немагнитной стали. Соседние башмаки статора сдвинуты на 1/4 зубцового деления. При поочередном включении секций ротор двигателя перемещается линейно, шагами, равными 1/4 зубцового деления, в одну или другую сторону. Выбег отсутствует. Недостатки ЛШД: 1. Невысокая скорость (не более 30 мм/с); 2. Малое тяговое усилие (не более 300-400 Н). А-А
Рисунок 2 - Линейный шаговый двигатель: 1 — ротор; 2 — кольца; 3 — башмак статора Магнитные усилители Магнитный усилитель (МУ) – это электрический аппарат, в котором для усиления сигнала используется управляемое индуктивное сопротивление. Схема простейшего дроссельного МУ представлена на рисунке 1.
Рисунок 1 - Дроссель насыщения Замкнутый магнитопровод имеет две обмотки – рабочую обмотку(переменного тока) Wр, включенную в цепь нагрузки Rн, и обмотку управления wу, на которую подается управляющий ток Iу. Кривая намагничивания материала сердечника дана на рисунке 2. Рисунок 2 - Кривая намагничивания сердечника МУ При прохождении перемененного тока по обмотке Wр на обмотке Wу будет наводиться э.д.с. Эта э.д.с. будет создавать переменный ток в цепи управления. Для ограничения этого тока в цепи управления включается балластный дроссель Xб. Рассмотрим вначале соотношения в дросселе при отсутствии тока управления (цепь управления разомкнута). Индуктивное сопротивление обмотки Wр равно:
При неизменных конструктивных параметрах индуктивность определяется магнитной проницаемостью mа. Если ток управления отсутствует, то сердечник работает в ненасыщенной зоне 1. В этой зоне магнитная проницаемость велика и индуктивное сопротивление дросселя велико. Сопротивление нагрузки обычно очень мало по сравнению с индуктивным, поэтому ток в рабочей обмотке определяется только индуктивным сопротивлением дросселя и мал по величине. Подадим в обмотку управления такой постоянный ток управления Iу, чтобы перенести рабочую зону полностью в область 2. В этой области из–за насыщения материал имеет малую магнитную проницаемость. Индуктивное сопротивление рабочей обмотки резко уменьшается, что ведет к уменьшению полного сопротивления цепи и возрастанию тока в нагрузке. Индуктивное сопротивление выбирается много больше активного сопротивления, тогда все напряжение источника питания приложено к сопротивлению нагрузки.
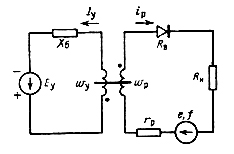
Усилитель с самонасыщением(МУС). Если в цепь рабочей точки обмотки включить вентиль, то под действием постоянной составляющей выпрямленного тока происходит подмагничивание сердечника. Такие усилители называются усилителями с самоподмагничиванием или с самонасыщением (рисунок 3).
Рисунок 3 - Схема замещения МУ В цепи управления включено балластное сопротивление Хб которое препятствует возникновению переменного тока в этой цепи. Направление напряжения источника, при котором вентиль проводит ток, примем за положительное, полупериод, при котором ток проходит через нагрузку, назовем рабочим. Петля гистерезиса материала, применяемого для усилителей, изображена на рисунке 4.
Рисунок 4 - Магнитный усилитель с самонасыщением (МУС): а – петля гистерезиса МУС; б – график основных электрических величин. При отсутствии управляющего поля Ну в сердечнике устанавливается остаточная индукция +Вr. Если следует рабочий полупериод, то с ростом тока точка, характеризующая магнитное состояние, будет перемещаться по участку 3-2’. Так как сердечник насыщен, то все напряжение цепи приложено к активному сопротивлению rp+Rн+Rв. К концу рабочего полупериода магнитное состояние сердечника вновь изображается точкой 3. В следующий полупериод вентиль не пропускает ток и весь полупериод магнитное состояние характеризуется точкой 3(напряжение источника приложено к вентилю). Таким образом, при отсутствии сигнала управления в рабочий полупериод проходит ток нагрузки, равный:
При наличии отрицательного поля управления –Ну начальное магнитное состояние перед рабочим полупериодом переместится в точку 1. под действием напряжения источника питания рабочая точка будет перемещаться по ветви частной петли гистерезиса 1-2, при этом сердечник будет находиться в ненасыщенном состоянии. Ток рабочей обмотки Wр определяется из следующих соображений. Для того чтобы в магнитопроводе создавалась индукция Ва, необходимо, чтобы в нем имелась напряженность поля На, равная:
Где l – средняя длина магнитопровода. Каждому значению На соответствует свое значение тока ip. С ростом индукции этот ток увеличивается. Если пренебречь активным падением напряжения от намагничивающего тока, то на участке 1-2 все напряжение источника уравновесится противо э.д.с. рабочей обмотки:
Проведя интегрирование при В=Ву+Вm(1-cos По этому закону индукция будет возрастать до тех пор, пока не достигнет значения индукции насыщения Bs(точка 2). После насыщения сердечника напряжение на дросселе uд становится равным нулю и ток в цепи определятся только активным сопротивлением rp+Rн+Rв. В точке 3 напряженность поля На=0, так как -Ну=Нр. После точки 3 индукция В спадает до значения, определяемого точкой 4. на участке 3-4 вентиль остается открытым, несмотря на то, что после Полупериод в котором индукция изменятся от +Вr до Ву под действием сигнала управления, называется управляющим полупериодом. Чем больше отрицательное поле управления –Ну, тем ниже опускается точка 1, тем позже наступает насыщение сердечника и меньше ток, проходящий через нагрузку.

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|







 =0, В=Ву получим:
=0, В=Ву получим: