
|
|
Кулачковые механизмы. Основные сведения.Динамический синтез кулачковых механизмов Методические указания по выполнению курсовой работы (проекта) по теории механизмов и машин для студентов дневного и заочного отделения
Ростов-на-Дону
Составители: канд. техн. наук, доц. В.А.Кочетов канд. техн. наук, доц. М.В.Савенков ст. препод. В.С. Цандеков
УДК 621.835 (07)
Методические указания по выполнению курсовой работы (проекта) по теории механизмов и машин для студентов дневного и заочного отделения – Ростов н/Д: Издательский центр ДГТУ, 2006. – 19с.
Печатается по решению методической комиссии конструкторского факультета
Научный редактор д.т.н., проф. В.П.Жаров
© Издательский центр ДГТУ, 2006.
Кулачковые механизмы. Основные сведения.
Плоские кулачковые механизмы являются трехзвенными механизмами и состоят из стоики, кулачка (входное звено) и толкателя {выходное звено). Кулачок и толкатель образуют со стойкой низшие кинематические пары, а между собой высшую кинематическую пару.
Полный цикл работы таких кулачковых механизмов осуществляется за один оборот кулачка. Перемещение толкателя из нижнего крайнего положения в крайнее верхнее положение называется ходом толкателя Н (мм), или Угол, на который поворачивается кулачок при перемещении толкателя из крайнего нижнего положения в крайнее верхнее положение, называется углом удаления ( Угол поворота кулачка, при котором толкатель остается в крайнем верхнем положении, называется углом дальнего выстоя ( Угол, на который поворачивается кулачок при перемещении толкателя из крайнего верхнего положения в крайнее нижнее положение, называется углом возвращения ( Угол поворота кулачка, при котором толкатель находится в крайнем нижнем положении, называется углом ближнего выстоя ( Острый угол между векторами абсолютной и относительной скорости (по отношении к кулачку) точки контакта толкателя с кулачком называется углом передачи движения Проектирование профиля кулачковой шайбы, обеспечивающей требуемый закон движения толкателя, составляет задачу синтеза кулачковых механизмов. Если для построения профиля кулачка имеются все необходимые исходные данные, в том числе и минимальный радиус кулачка, то такой синтез называется кинематическим. При проектировании кулачковых механизмов помимо обеспечения требуемого закона движения толкателя приходится решать задачи, связанные с получением минимальных габаритов кулачковых механизмов при одновременном обеспечении нормальных динамических условий их работы (отсутствие заклинивания, допустимый износ и т.д.). Поэтому при проектировании часто задаются некоторыми дополнительными динамическими условиями, например минимальным углом передачи движения, а минимальный радиус кулачка определяют исходя из этих условий. Такое решение задачи синтеза называется динамическим синтезом кулачковых механизмов.

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|
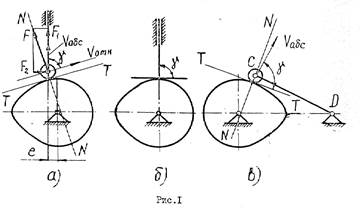 Наиболее распространенными являются кулачковые механизмы, у которых кулачок совершает вращательное движение, а толкатель - либо возвратно-поступательное (рис. I, а, б), либо колебательное движение (рис. Iв). Если центр вращения кулачка лежит на продолжении прямолинейной траектории толкателя, то кулачковый механизм называется центральным (см. рис. I б), если же центр вращения кулачка не лежит на этой прямой, то кулачковый механизм называется внецентренным, а величина e называется эксцентриситетом (см. рис. Iа).
Наиболее распространенными являются кулачковые механизмы, у которых кулачок совершает вращательное движение, а толкатель - либо возвратно-поступательное (рис. I, а, б), либо колебательное движение (рис. Iв). Если центр вращения кулачка лежит на продолжении прямолинейной траектории толкателя, то кулачковый механизм называется центральным (см. рис. I б), если же центр вращения кулачка не лежит на этой прямой, то кулачковый механизм называется внецентренным, а величина e называется эксцентриситетом (см. рис. Iа). (град).
(град). ).
). ).
). ).
). ). Сумма
). Сумма 
 (см. рис.1). Величина
(см. рис.1). Величина перемещает толкатель, преодолевая силы полезного и вредного сопротивления, а составляющая
перемещает толкатель, преодолевая силы полезного и вредного сопротивления, а составляющая  увеличивает трение в кинематической паре, образованной толкателем со стойкой.
увеличивает трение в кинематической паре, образованной толкателем со стойкой. уменьшается, а сила
уменьшается, а сила  увеличивается, следовательно, при некотором предельном значении g сила
увеличивается, следовательно, при некотором предельном значении g сила  - минимальное значение угла передачи движения, при котором еще не наблюдается заклинивание.
- минимальное значение угла передачи движения, при котором еще не наблюдается заклинивание.