
|
|
Порядок выполнения работы1. Включить сетевой шнур измерителя в питающую сеть. 2. Нажать переключатель СЕТЬ, проверяя, все ли индикаторы измерителя высвечивают цифру нуль, а также светится ли лампочка фотоэлектрического датчика. 3. Максимально отдалить друг от друга грузы. 4. Установить маятник в таком положении, чтобы черта на мисочке показывала угол отклонения α=0. 5. Выстрелить снаряд из стреляющего устройства. 6. Измерить максимальный угол отклонения маятника α0. 7. Включить и занулить счетчик времени. 8. Отклонить маятник на угол α0, включить секундомер и отпустить маятник. 9. Измерить время для двадцати колебаний и вычислить Т1. Пункты 5 – 9 повторить три раза. 10. Максимально приблизить друг к другу грузы М и повторить действия согласно пунктам 4, 7, 8 (исключая пункты 5,6). 11. Измерить время для двадцати колебаний и вычислить Т2. Измерения провести по три раза. Результаты измерений занести в таблицу 8.2. Скорость вычислить по формуле (8.16). Таблица 8.2
Контрольные вопросы 1. Сформулируйте цель работы. 2. Как определяется момент импульса материальной точки, твердого тела относительно неподвижной оси вращения? 3. При каких условиях выполняется закон сохранения момента импульса относительно оси? 4. Почему измерения проводятся при двух положениях перемещаемых грузов? 5. Как получить формулу (8.16)? 6. Сделайте выводы по работе.
9. ИЗУЧЕНИЕ ПРЕЦЕССИИ ГИРОСКОПА
Приборы и принадлежности: гироскоп РМ-10.
Перед выполнением лабораторной работы необходимо в учебной литературе по курсу физики ознакомиться со следующими темами: свободные оси, гироскоп, момент импульса, основной закон динамики вращательного движения.
Введение В этой работе определяется скорость прецессии гироскопа Ω и проверяется отношения:
Гироскопом называется быстро вращающееся симметричное твердое тело, ось вращения которого может изменять свое направление в пространстве. Основное свойство гироскопа – способность сохранять неизменным направление оси вращения при отсутствии момента внешних сил.
Рассмотрим гироскоп, состоящий из диска, который может вращаться вокруг горизонтальной оси О1О2 (рис. 9.1) и противовеса К. Ось гироскопа О1О2 шарнирно закреплена в точке О1 вертикальной подставки. Противовес К можно перемещать вдоль оси. Если противовес К расположен таким образом, что точка О1 является центром тяжести, т.е.
получим
где
смещением центра тяжести системы и
где
Из уравнения (9.2) следует, что изменение момента импульса
Результирующий момент будет равен
Это означает, что ось гироскопа изменит свое положение в горизонтальной плоскости, повернувшись за время dt на угол da. За последующий промежуток времени снова произойдет изменение момента импульса на Величина
называется угловой скоростью прецессии. Вычислим ее значение. Из формул (9.3) и (9.4) следует, что
Из рис. 9.2 следует:
подставим (9.7) в (9.5), получим
или Из уравнения (9.8) следует, что с увеличением угловой скорости вращения гироскопа ω угловая скорость прецессии W уменьшается. Если скорость вращения диска постоянна w = const, то отношение
Описание прибора На основании, оснащенном ножками с регулируемой высотой, позволяющим произвести выравнивание прибора, закреплена колонка с кронштейном, на котором закреплен фотоэлектрический датчик и внешняя втулка вращательного соединения. Электрический двигатель смонтирован на кронштейне. Рычаг, закрепленный на корпусе двигателя, имеет миллиметровую шкалу. На рычаге закреплен груз (противовес). С помощью указателя можно определить по шкале угол поворота гороскопа вокруг вертикальной оси. Диск имеет на окружности отверстия через каждые 5°, которые с помощью фотоэлемента позволяют давать информацию об угле оборота гироскопа. На лицевой панели блока управления находятся следующие манипуляционные элементы: I) СЕТЬ, 2) СБРОС, 3) СТОП, 4) РЕГ. СКОРОСТЬ. Время запуска гироскопа 2 минуты. 
Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|

 .
.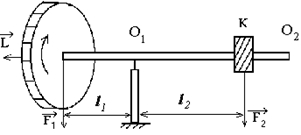 Рис. 9.1.
Рис. 9.1.
 где F1 и F2 - силы тяжести диска и противовеса, l1 и l2 плечи сил, то результирующий момент сил, действующих на систему, равен нулю (М=О). В противном случае система отклонилась бы от положения равновесия. Пусть диск уравновешенной системы вращается с угловой скоростью ω. В этом случае на основании II закона динамики для вращательного движения
где F1 и F2 - силы тяжести диска и противовеса, l1 и l2 плечи сил, то результирующий момент сил, действующих на систему, равен нулю (М=О). В противном случае система отклонилась бы от положения равновесия. Пусть диск уравновешенной системы вращается с угловой скоростью ω. В этом случае на основании II закона динамики для вращательного движения (9.1)
(9.1) , (9.2)
, (9.2) - момент импульса диска. Из уравнения (9.2) следует, что вектор момента импульса в этом случае не зависит от времени.
- момент импульса диска. Из уравнения (9.2) следует, что вектор момента импульса в этом случае не зависит от времени. .
.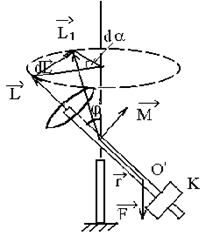 Рис.9.2.
Рис.9.2.
 , совпадающим по направлению с угловой скоростью; таким образом, при отсутствии момента внешних сил гироскоп сохраняет положение своей оси в пространстве.
Передвинем противовес К на небольшое расстояние вправо. Центр тяжести системы переместится в точку О' (рис.9.2). Равновесие нарушится, ось гироскопа будет составлять с вертикалью угол j.
В этом случае момент силы
, совпадающим по направлению с угловой скоростью; таким образом, при отсутствии момента внешних сил гироскоп сохраняет положение своей оси в пространстве.
Передвинем противовес К на небольшое расстояние вправо. Центр тяжести системы переместится в точку О' (рис.9.2). Равновесие нарушится, ось гироскопа будет составлять с вертикалью угол j.
В этом случае момент силы  (в формуле (9.1)) обусловлен
(в формуле (9.1)) обусловлен
 ,
, - радиус-вектор, проведенный из точки О1 к точке приложения силы. Вектор
- радиус-вектор, проведенный из точки О1 к точке приложения силы. Вектор  . (9.3)
. (9.3) за время dt совпадает по направления с вектором
за время dt совпадает по направления с вектором  . (9.4)
. (9.4) .
. (9.5)
(9.5) . (9.6)
. (9.6) , тогда
, тогда (9.7)
(9.7)
 . (9.8)
. (9.8) постоянно.
постоянно.