
|
|
Датчик крутящего момента с индукционными преобразователями
Рисунок 4 - Схема датчика крутящего момента с индукционными преобразователями На валу на определенном расстоянии друг от друга располагаются диски ферромагнитного материала. По окружности дисков расположены зубцы, которые проходят между полюсами сердечников индукционных преобразователей. При закручивании вала возникает сдвиг по фазе между наводимыми ЭДС. Время, соответствующее углу закручивания φ, равно Частота переменной ЭДС преобразователь fп= Тогда сдвиг по фазе α переменного ЭДС равен α = Значит, угол сдвига по фазе α пропорционален числу зубцов и углу закручивания вала. Недостаток преобразователя – высшие гармоники, которые вносят большую погрешность при данном способе применения. Для уменьшения погрешностей сигналы с ИП подаются на усилители-ограничители, где из них формируются прямоугольные сигналы, которые потом сравниваются.
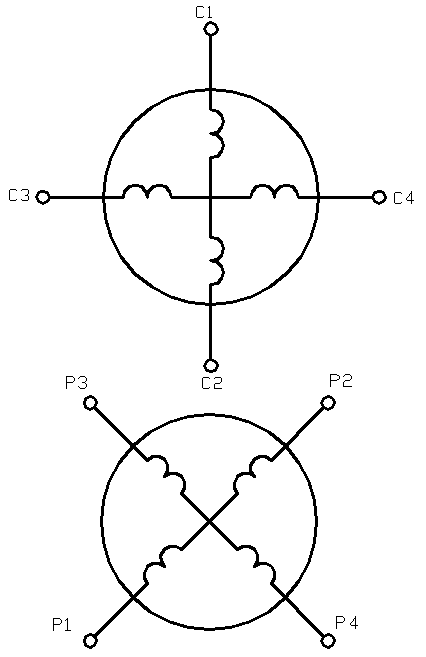
Вращающиеся трансформаторы Это микромашины переменного тока, служащие для преобразования угла поворота ротора α в напряжение, пропорциональное либо самому углу, либо некоторым функциям от угла. В зависимости от закона изменения выходного напряжения поворотные трансформаторы делятся на следующие типы: 1. синусно-косинусные ВТ (СКВТ), позволяющие получать два выходных напряжения, одно из которых пропорционально синусу, а другое – косинусу угла поворота. 2. линейные ВТ (ЛВТ), у которых выходное напряжение изменяется по закону, близкому к линейному в определенном диапазоне изменения α. 3. масштабные ВТ (МВТ), у которых выходное напряжение изменяется пропорционально входному, а коэффициент пропорциональности определяется углом поворота ротора. 4. вращающиеся трансформаторы-построители (ПВТ). По конструкции ВТ подобны асинхронным машинам с фазным ротором. На статоре и роторе размещаются по две одинаковые однофазные обмотки, сдвинутые друг относительно друга на 90°. Одна из статорных обмоток подключается к сети переменного тока и называется обмоткой возбуждения. Вторая статорная обмотка называется компенсационной. Одна из роторных обмоток называется синусной, а другая косинусной. Статорные и роторные обмотки попарно одинаковы. Роторные обмотки подсоединяются к одному общему кольцу. Схема ВТ в общем виде имеет вид:
Рисунок 1 - Схема включения вращающегося трансформатора Все типы ВТ питаются от сети 400 Гц (не ниже) 4 класса точности ВТ: 0 – 0.05% ошибки; 1 – 0.1% ошибки; 2 – 0.25% ошибки; 3 – свыше 0.25% ошибки.
105. Сельсины.Работав индикаторном режиме Сельсинами называются индукционные электрические машины переменного тока, обладающие способностью самосинхронизации. В зависимости от числа фаз обмотки возбуждения они бывают трехфазные и однофазные. Трехфазные – более мощные. У сельсинов – две обмотки: обмотка возбуждения и обмотка синхронизации. На судах, в основном, применяются однофазные сельсины. Обмотки синхронизации выполняются трехфазными со сдвигом на 120°. Разомкнутые точки фаз обмотки называют началом, а замкнутые – концом обмотки. По конструкции сельсины делятся на контактные и бесконтактные. У контактных сельсинов – явнополюсная магнитная система. Обмотка возбуждения располагается либо на статоре, либо на роторе. Обмотка синхронизации – распределенная и выполняется на части машины, противоположной расположению обмотки возбуждения. Недостаток – наличие скользящих контактов. Поэтому в настоящее время их вытеснили бесконтактные сельсины. В них обе обмотки расположены на статоре. В автоматических системах используется пара сельсинов – сельсин-датчик (СД) и сельсин-приемник (СП). Эта пара может работать в следующих режимах: 1. Индикаторный режим – используется для дистанционной передачи угловых перемещений при незначительном моменте сопротивления (в основном в указателях). Это – машинный телеграф, указатель положения пера руля, репитерах гирокомпаса и т.д. 2. Трансформаторный режим – для измерения разности между угловыми положениями механически не связанных валов. 3. Режим алгебраического суммирования угловых перемещений двух не связанных друг с другом валов. В режимах 1 и 2 сельсины работают как измерительные преобразователи, в 3 режиме – как аналоговые счетно-решающие устройства. По точности сельсины бывают первого, второго и третьего класса точности. По конструктивному исполнению однофазные сельсины делятся на машины с явновыраженными полюсами статора или явновыраженными полюсами ротора. Это деление справедливо для контактных сельсинов. Если у контактного сельсина статор имеет явновыраженные полюса, то ротор удобно балансировать. Недостаток – большие габариты и масса, большое число токосъемных колец на валу ротора. Если ротор имеет явновыраженные полюса, то у него меньше колец и он легче. Чаще применяют бесконтактные сельсины. Их устройство таково: обе обмотки расположены на статоре, а ферромагнитный ротор разделен намагниченной алюминиевой прослойкой на две части. Однофазная обмотка возбуждения состоит из двух катушек, соединенных последовательно. Трехфазная обмотка расположена в пазах статора. На обмотку возбуждения подается напряжение UВ = Umsinωt Поток возбуждения отстает от напряжения на В исходном состоянии ЭДС 1-го луча равна E1 = Emax = 4.44fwΦm, w – число витков одной катушки трехфазной обмотки При повороте на угол α получим: E1 = Emaxcosα E2 = Emaxcos(α+120°) E3 = Emaxcos(α+240°) Таким образом, сельсин реагирует на угол поворота ротора изменением ЭДС в синхронизирующей обмотке. 
Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2024 stydopedia.ru Все материалы защищены законодательством РФ.
|

 , где n – частота вращения вала.
, где n – частота вращения вала. , где z – число зубцов на диске
, где z – число зубцов на диске , где T=
, где T= 
 ΦВ = Φmsin(ωt -
ΦВ = Φmsin(ωt -