
|
|
Функциональная схема лагаИНДУКЦИОННЫЙ ЛАГ ИЭЛ-2М Назначение Индукционный электронный лаг ИЭЛ-2М так же, как и любой другой лаг, предназначен для измерения скорости судна и пройденного им расстояния. Он является относительным измерителем скорости, т.е. определяет скорость судна относительно воды. Для индикации скорости судна и пройденного им расстояния в лаге имеются два устройства: указатель скорости и указатель пройденного расстояния. Оба индикатора снабжены дистанционной репитерной передачей. Основные технические характеристики лага
В схеме имеется блок, позволяющий контролировать работу отдельных узлов и вести поиск неисправностей. Питание лага осуществляется от судовой сети однофазного переменного тока частотой 50Гц, напряжением 220 В. Потребляемая мощность составляет примерно 170 Вт (при cos j= 0,7), ресурс лага равен 50000 ч. Комплект приборов лага
Вкомплект лага ИЭЛ-2М входят следующие приборы (рис. 1): индукционный преобразователь (прибор 9), центральный прибор (прибор 6), прибор питания (прибор 3), согласующий прибор (при
Прибор 9 является датчиком первичной информации, который представляет собой индукционный преобразователь, вырабатывающий электрический сигнал, пропорциональный скорости судна относительно воды. Этот прибор устанавливается в специальном клинкете. Имеются две модификации индукционного преобразователя: с установкой заподлицо с корпусом судна или с выдвижением за днище судна до 890 мм. На судах морского флота в настоящее время используют индукционные преобразователи, устанавливаемые заподлицо с корпусом судна (прибор 9Д с герметизированным кабелем). Размещение прибора 9 в клинкете позволяет легко заменить его в случае выхода из строя. На судах на подводных крыльях вместо прибора 9 применяют прибор 64, который монтируют стационарно. Прибор 6 предназначен для преобразования сигнала, поступающего от прибора 9 (или прибора 64), в показания скорости V судна и пройденного им расстояния S. В приборе 6 имеются блоки преобразования, индикации, контроля и управления. Узлы центрального прибора выполнены на современных электронных схемах. Прибор 3 подключен к судовой сети (220 В). Он служит для подачи в схему лага напряжений требуемых значений: постоянного 5, 10, 16, 35, 90 В, переменного 7, 12, 20 В, 50 Гц. Кроме этого в приборе создается опорное напряжение ~Uоп, необходимое для работы лага. Прибор 29 согласует выходное сопротивление индукционного преобразователя с входным сопротивлением измерительной схемы прибора 6. В согласующем приборе размещен предварительный усилитель сигнала. Прибор 1 представляет собой цифровой индикатор скорости (от 0 до 30 уз). Прибор 5 содержит цифровой указатель скорости судна и механический счетчик пройденного судном расстояния. Прибор 59 позволяет размножать, получаемую информацию и подключать к схеме лага дополнительно до семирепитеров скорости судна и пройденного расстояния. Прибор 119 преобразует цифровой код скорости судна в аналоговую форму сигнала V, необходимую для подключения лага к гирокомпасу и радиолокатору. При установке комплекта приборов лага на судне необходимо добиваться, чтобы длина (в м) соединительного кабеля между отдельными приборами не превышала допустимых приведенных ниже значений: между прибором 3 и прибором 29................ 150 между прибором 3 и прибором 6.................. 50 между прибором 9 и прибором 29................ 10 Принцип действия лага
Сигнал ~Uип снимается с электродов 2 и передается в электрическую схему лага для преобразования его в отсчет скорости V судна.
При преобразовании сигнала ~Uип квадратурная помеха отделяется от полезного сигнала и компенсируется. На рис. 3 представлена блок-схема индукционного лага ИЭЛ-2М, поясняющая принцип преобразования сигнала ИП в показания скорости судна и пройденного расстояния. При движении судна в индукционном преобразователе ИП возникает сигнал переменного тока ~Uип, пропорциональный скорости V судна. Этот сигнал поступает в прибор 29, в котором находится предварительный усилитель УП, предназначенный для согласования выходного сопротивления ИП с входным сопротивлением усилителя измерительного канала УИК. В блоке УИК производятся усиление сигнала ~Uип и преобразование его в напряжение постоянного тока _Uс. Одновременно с преобразованием сигнала из него исключается квадратурная помеха, которая всегда возникает в ИП при работе лага. Сигнал постоянного тока _Uс, свободный от помехи, с выхода УИК подается в преобразователь "напряжение—время" (ПНВ). Сюда же поступает опорное напряжение в виде сигнала постоянного тока _Uoп. Опорное напряжение вырабатывается в приборе питания (прибор 3), , поступает в усилитель опорного канала УОК, где усиливается и преобразуется в сигнал постоянного тока _Uoп. В блоке ПНВ при помощи сигналов _Uс и _Uопвырабатывается прямоугольный импульс, длительность t которого пропорциональна скорости V судна. Для измерения значения t, т.е. для расчета скорости V, служит преобразователь "время—цифра" (ПВЦ). Определение осуществляется путем подсчета числа импульсов (за время т), поступающих от генератора опорной частоты (f0 = 250кГц). Чем выше скорость судна, тем длиннее промежуток времени t и тем большее число импульсов будет подсчитано за время t. Эта информация поступает в устройство индикации скорости УИС и устройство индикации расстояния УИР. В итоге в блоке УИС вырабатывается цифровая индикация скорости V, а в блоке УИР — пройденного расстояния S. Эти данные подаются в репитеры: в прибор 1 — скорость, в прибор 5 — скорость и пройденное расстояние. Функциональная схема лага
Функциональную схему лага можно разделить на следующие основные части: аналоговая часть (АЧ); преобразователь "напряжение-время" (ПНВ); преобразователь "время—цифра" (ПВЦ).
Рис. 4 Аналоговая часть. Вэтой части лага (рис. 4) осуществляются усиление и преобразование сигнала ~Uип, поступающего от индукционного преобразователя, а также выработка, усиление и преобразование опорного напряжения ~Uоп, необходимого для работы схемы. Выходными элементами аналоговой части являются фильтры Z1 и Z2, с которых снимаются сигналы _Uс и _Uопв виде напряжений постоянного тока. В аналоговой части расположены три блока: предварительный усилитель УП, усилитель измерительного канала УИК и усилитель опорного канала УОК. Блок предварительного усилителя состоит из двух операционных усилителей 29А1 и 29А2, на вход которых подается сигнал ~Uип. Предварительный усилитель обеспечивает согласование выходного сопротивления индукционного преобразователя с входным сопротивлением усилителя измерительного канала УИК. К блоку УП, расположенному в приборе 29, относятся также два реле: 29К1 и 29К2. Контакты этих реле 29К1.1, 29К1.2, 29К2.1, 29К2.2 обеспечивают три режима работы лага, в зависимости от положения переключателя 6S1, находящегося в приборе 6. При положении 1 "Работа" обмотки реле обесточены, все контакты замкнуты вверх (по схеме) и на вход УП подается сигнал ~Uип. Лаг должен показывать скорость судна. В положении 2 "Калибровка" обмотка реле 29К1 подключается к источнику постоянного тока (напряжением 15 В). Контакты 29К 1.1 и 29К1.2 переводятся вниз (по схеме), и вход предварительного усилителя замыкается накоротко. Лаг должен показывать нулевой отсчет скорости. В положении 3 "Масштабирование" переключателя 6S1 под током оказывается обмотка реле 29К2. Контакты 29К2.1 и 29К2.2 замыкаются вниз (по схеме) и на вход УП подается эталонное напряжение, снимаемое с резистора 3R1. При этом лаг (для проверки его действия) должен показывать некоторый (эталонный) отсчет скорости. Резисторы 29R20, 29R21, 29R22 служат для дискретного изменения коэффициента усиления УП при тарировке лага. В блоке УП имеется схема контроля СК с лампой 29Н1, указывающей на наличие сигнала на выходе предварительного усилителя. Блок усилителя измерительного канала собран на двух операционных усилителях: 6А2 и 6А5. На вход усилителя 6А2 подается сигнал ~Uип = ~Uс + ~Uк, поступающий с выхода предварительного усилителя УП. Усилитель 6А5 является инвертирующим: он изменяет фазу сигнала ~Uип на 180°. Блок УИК обеспечивает не только усиление сигнала ~Uип, но и его преобразование в напряжение постоянного тока (детектирование) с одновременным подавлением квадратурной помехи ~Uк. Такое преобразование осуществляется при помощи управляемых электронных ключей 6А7.1 и 6А7.2, которые открываются поочередно прямоугольными синхронными с сигналом импульсами, поступающими с нуль-органа НО1.
Постоянная составляющая полезного сигнала _UC выделяется фильтром Z1 и подается в схему ПНВ. Знакопеременная квадратурная помеха, не имеющая постоянной составляющей, подавляется фильтром и исключается из показаний лага.
Опорное напряжение переменного тока _ Uопснимается с резистора 3R1, который соединен последовательно с обмоткой электромагнита индукционного преобразователя. Эта цепь получает питание от трансформатора ЗТ1. Значение величины ~Uоп подается на вход усилителей, где будут возникать два сигнальных напряжения со сдвигом по фазе на 180°. После детектирования, производимого ключами 6А8.1 и 6А8.2, на выходе фильтра Z2 появляется сигнал постоянного тока _Uоп. Ключи 6А8.1 и 6А8.2 открываются поочередно под действием прямоугольных импульсов, поступающих с нуль-органа НО1. Нуль-орган НО1 представляет собой электронную схему, имеющую один вход и два выхода: простой и инверсный. На вход подается сигнал в виде синусоидального напряжения ~U оп, а на выходах образуются прямоугольные импульсы со сдвигом по фазе на 180°.
В блоке УОК расположены четыре потенциометра: 6R6, 6R7, 6R8 и 6R12. Они предназначены для выполнения регулировок в процессе эксплуатации лага. Потенциометром 6R6 устанавливают нулевой отсчет скорости в режиме "Калибровка", а потенциометром 6R7 — в режиме "Работа". Регуляторы 6R8 и 6R12 служат для установки эталонного отсчета скорости, наблюдаемого в режиме "Масштабирование". Сигналы _Uси _Uoпс фильтров Z1 и Z2 подаются в преобразователь "напряжение—время". Преобразователь "напряжение—время".Узел ПНВ (рис. 6) предназначен для преобразования сигнала _Uс в прямоугольный импульс с временным интервалом, пропорциональным скорости судна. Это преобразование сигнала _Uс осуществляется по принципу двойного интегрирования с использованием опорного напряжения _Uоп. Сначала интегрируется отрицательное напряжение сигнала Uc, а затем — положительное опорное напряжение Uоп. Это позволяет исключить влияние колебаний напряжения судовой сети на показания лага. В состав преобразователя "напряжение—время" входят: генератор прямоугольных импульсов ГПИ; электронные ключи 6А9, 6А10.1, 6А10.2, 6А11.1, 6А11.2; схема управления ключами СУ; интегрирующий усилитель 6А15; нуль-орган НО2. Работа ПНВ происходит следующим образом. С выхода ГПИ в блок СУ подаются синхронизирующие импульсы длительностью 0,5 мкс, периодичностью 8 Гц, которые определяют ритм работы схемы лага.
В момент времени t1 (рис.7) синхронизирующий импульс через блок СУ (см. рис. 6) размыкает ключи 6А9, 6А10.2 и замыкает ключ 6A11.2. На вход усилителя 6А15 подается сигнал в виде ускоряющего отрицательного напряжения, которое снимается с делителя напряжений 6R40, 6R42. Усилитель 6А15 является интегрирующим, поэтому на его выходе наблюдается увеличение напряжения, подаваемого на вход нуль-органа НО2.
импульса, передний фронт которого в момент времени t2 размыкает ключ 6А11.2 (см. рис. 6) и замыкает ключ 6А10.1. В этот же момент блок СУ начинает формировать другой прямоугольный импульс с фиксированной длительностью t0=18мс (см. рис. 7). Через ключ 6А10.1 (см. рис. 6) на вход усилителя 6А15 подается полезный сигнал в виде отрицательного напряжения _Uс. Конденсатор 6С32 заряжается в течение промежутка времени t0, и к моменту времени t3 (см. рис. 7) сигнал на выходе усилителя 6А15 достигает некоторого максимального напряжения Um. Значение Um определяется скоростью V судна. В момент времени t3 задний фронт импульса t0 через схему управления размыкает ключ 6А10.1 и замыкает ключ 6А11.1. На вход усилителя 6А15 подается положительное опорное напряжение _Uoп. Конденсатор 6С32 (см. рис. 6) начинает разряжаться. Сигнал на выходе 6А15, т.е. на входе НО2, уменьшается. Когда он достигает значения U0 (момент времени t4 на рис. 7), триггерная схема нуль-органа НО2 срабатывает. При этом на выходе Н02 образуется задний фронт импульса т, который через блок СУ размыкает ключ 6А11.1 и снова замыкает ключи 6А9 и 6А10.2. Вход усилителя 6А15 заземляется, конденсатор 6С32 (см. рис. 6) разряжается до нуля, и к моменту времени t5 (см. рис. 7) схема ПНВ приходит в исходное состояние. Время t1, в течение которого заряд конденсатора 6С32 (см. рис. 6) уменьшается с напряжения Um до значения U0, зависит от значения Um и скорости разряда. Значение Um определяется сигналом _Uс, и следовательно скоростью V судна. Скорость разряда зависит от значения опорного напряжения _Uoп, которое всегда постоянно. Таким образом, временной интервал t1 оказывается пропорциональным скорости судна. Следует отметить, что он не зависит от колебаний тока возбуждения io индукционного преобразователя, т.е. от изменения напряжения судовой сети.
Прямоугольный импульс t = t0 +t1, вырабатываемый нуль-органом НО2, подается в схему управления ключами СУ, где из него исключается постоянный временной интервал t0=18 мс. Следовательно, выходным сигналом блока ПНВ является прямоугольный импульс t1= nV. Коэффициент пропорциональности п есть постоянная величина, зависящая от конструктивных параметров к, Rc, Rопи t0. С выхода ПНВ сигнал t1 подается на вход преобразователя "время—цифра". Преобразователь "время—цифра".Схема ПВЦ служит для преобразования прямоугольных импульсов длительностью t1= nV, снимаемых с выхода блока ПНВ, в отсчеты скорости V и пройденного расстояния S. К узлу ПВЦ (рис. 8) относятся: цифровой фильтр ЦФ, корректор К, устройство индикации скорости УИС, устройство индикации расстояния УИР. Узел ПВЦ работает следующим образом. Прямоугольные импульсы t1 с частотой следования 8 Гц из схемы управления ключами СУ (см. рис. 6) подаются на вход цифрового фильтра ЦФ (см. рис. 8.8). В ЦФ вырабатывается некоторый средний прямо-угольный импульс (усреднен-ный строб) tср. Осреднение осуществляется за промежуток, равный постоянной времени фильтра. Выключателем 6S3 можно установить одно из двух фиксированных значений постоянной времени ЦФ. За время tср производится подсчет импульсов, поступающих в ЦФ из генератора прямоугольных импульсов ГПИ и имеющих частоту f0 = 250кГц. Число сосчитанных импульсов соответствует скорости судна с некоторой погрешностью. Для ее устранения в схеме предусмотрен корректор К, который вырабатывает импульсы дополнительной частоты fдоп. Значение и знак fдоп задаются заранее составленной программой корректора по результатам испытания лага на мерной линии. Программа вводится в действие сигналом скорости дискретно, через 1 уз. В результате на выходе схемы И наблюдается исправленная частота (f0 + fдоп). Благодаря действию корректора счетчик импульсов СИ за время tср подсчитывает число импульсов, соответствующее исправленному значению скорости V судна. Таким образом, изменением частоты заполнения tср компенсируется погрешность в длительности временного интервала t1, возникающая из-за неточной работы индукционного преобразователя. Выключателем 6S2 корректор может быть включен (положение 1) или отключен (положение 2). Устройство индикации скорости УИС предназначено для отображения на цифровом табло значения скорости судна в узлах. С выхода счетчика импульсов СИ на вход регистра памяти РП подается информация (с частотой 8 Гц) о скорости судна в виде двоично-десятичного кода. Одновременно с генератора прямоугольных импульсов ГПИ на регистр памяти РП поступают управляющие импульсы, которые определяют периодичность индикации скорости (1 Гц). С выхода регистра памяти РП код скорости подается на дешифратор ДШ, который обеспечивает включение ламп цифрового табло. Устройство индикации расстояния УИР служит для подсчета общего числа импульсов, идущих пачками на счетчик СИ. Для этой цели пачки импульсов подаются на вход делителя с коэффициентом деления К = 720, где вырабатывается счетный импульс через определенное число импульсов, проходящих через делитель. Пятьсот счетных импульсов соответствуют пройденному расстоянию в 1 милю. Эти импульсы через усилитель мощности 6А16 подаются на шаговый двигатель 6М1, который через редуктор связан с механическим счетчиком пройденного расстояния S. Один счетный импульс изменяет показание механического счетчика на 0,002мили. Выключателем 6S4 можно включить или отключить счетчик расстояния. 
Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2024 stydopedia.ru Все материалы защищены законодательством РФ.
|

 бор 29), указатель скорости судна (прибор 1), указатель скорости V судна и пройденного им расстояния S (прибор 5), размножитель информации (прибор 59) и прибор связи (прибор 119).
бор 29), указатель скорости судна (прибор 1), указатель скорости V судна и пройденного им расстояния S (прибор 5), размножитель информации (прибор 59) и прибор связи (прибор 119).
 Чувствительным элементом лага является индукционный преобразователь (ИП), который вырабатывает сигнал ~Uип, пропорциональный скорости V судна. Принцип действия индукционного преобразователя основан на явлении электромагнитной индукции. При движении судна поток морской воды обтекает торцовую поверхность корпуса ИП (рис. 2). На этой поверхности расположены два электрода 2.Линия, соединяющая электроды, перпендикулярна диаметральной плоскости (ДП) судна.
Чувствительным элементом лага является индукционный преобразователь (ИП), который вырабатывает сигнал ~Uип, пропорциональный скорости V судна. Принцип действия индукционного преобразователя основан на явлении электромагнитной индукции. При движении судна поток морской воды обтекает торцовую поверхность корпуса ИП (рис. 2). На этой поверхности расположены два электрода 2.Линия, соединяющая электроды, перпендикулярна диаметральной плоскости (ДП) судна.
 Рис. 3
Рис. 3 

 Принцип подавления квадратурной помехи UK методом синхронного детектирования можно пояснить с помощью временных диаграмм (рис. 5). На входы ключей 6А7.1 (см. рис. 4) и 6А7.2 с индукционного преобразователя поступает один и тот же сигнал ~Uип = ~Uс + ~Uк, но со сдвигом по фазе на 180°. Сдвиг по фазе создает инвертирующий усилитель 6А5. В первый полупериод на вход фильтра Z1 подается сигнал, проходящий через ключ 6А7.2, который на это время открыт прямоугольным импульсом нуль-органа НО1. Во второй полупериод ключ 6Л7.2закрыт, а ключ 6А7.1 открыт и на вход фильтра Z1 подается сигнал, пропускаемый ключом 6А7.1. В итоге на входе фильтра Z1 наблюдается пульсирующее (одного знака) напряжение полезного сигнала Uc и знакопеременное напряжение квадратурной помехи UK.
Принцип подавления квадратурной помехи UK методом синхронного детектирования можно пояснить с помощью временных диаграмм (рис. 5). На входы ключей 6А7.1 (см. рис. 4) и 6А7.2 с индукционного преобразователя поступает один и тот же сигнал ~Uип = ~Uс + ~Uк, но со сдвигом по фазе на 180°. Сдвиг по фазе создает инвертирующий усилитель 6А5. В первый полупериод на вход фильтра Z1 подается сигнал, проходящий через ключ 6А7.2, который на это время открыт прямоугольным импульсом нуль-органа НО1. Во второй полупериод ключ 6Л7.2закрыт, а ключ 6А7.1 открыт и на вход фильтра Z1 подается сигнал, пропускаемый ключом 6А7.1. В итоге на входе фильтра Z1 наблюдается пульсирующее (одного знака) напряжение полезного сигнала Uc и знакопеременное напряжение квадратурной помехи UK. Блок усилителя опорного канала предназначен для выработки опорного напряжения постоянного тока _Uon и создания прямоугольных импульсов, управляющих электронными ключами. К блоку УОК относятся два операционных усилителя 6АЗ и 6А4, электронные ключи 6А8.1 и 6А8.2, фильтр Z2 и нуль-орган НО1.
Блок усилителя опорного канала предназначен для выработки опорного напряжения постоянного тока _Uon и создания прямоугольных импульсов, управляющих электронными ключами. К блоку УОК относятся два операционных усилителя 6АЗ и 6А4, электронные ключи 6А8.1 и 6А8.2, фильтр Z2 и нуль-орган НО1.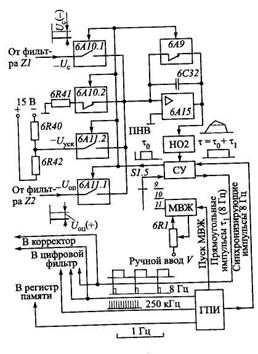
 Перед приходом синхронизирующего импульса ключи блока ПНВ находятся в исходном состоянии: ключи 6А10.1, 6А11.1 и 6А11.2 разомкнуты, а ключи 6А9 и 6А10.2 замкнуты.
Перед приходом синхронизирующего импульса ключи блока ПНВ находятся в исходном состоянии: ключи 6А10.1, 6А11.1 и 6А11.2 разомкнуты, а ключи 6А9 и 6А10.2 замкнуты.