
|
|
Кинематическое исследование механизмаСанкт-Петербургский государственный аграрный университет
Кафедра прикладной механики, физики и инженерной графики
РАСЧЁТНО – ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
К КУРСОВОМУ ПРОЕКТУ ПО ТЕОРИИ МЕХАНИЗМОВ И МАШИН
Тема проекта: Исследование шарнирно-рычажного механизма
Задание № …. Вариант № ….
Выполнил: студент гр. ______ ________________ ( Фамилия, И.О. )
Руководитель: _____________ ______________ ( Фамилия, И.О. )
Пушкин, 20 г. СОДЕРЖАНИЕ:
1. Структурный анализ механизма
1.1 Схема заданного механизма 3 1.2 Определение степени подвижности механизма 4 1.3 Разложение механизма на структурные группы Ассура, определение их класса, порядка и вида 4 1.4 Определение формулы строения механизма, его класса и порядка 4
2. Кинематическое исследование механизма4
2.1 Планы положений механизма 4 2.2 Планы скоростей механизма 5 2.3 Планы ускорений механизма 7 2.4 Диаграммы перемещений, скоростей и ускорений ползуна 10
Силовой расчёт механизма
3.1 Определение силы Рс по индикаторной диаграмме 12 3.2 Силовой расчёт группы Ассура 2-го класса 2-го вида 13 3.3 Силовой расчёт группы Ассура 2-го класса 1-го вида 14 3.4 Силовой расчёт ведущего звена 16 3.5 Определение Ру методом Н.Е. Жуковского 17
Расчёт маховика
4.1 Построение графика приведенных моментов инерции 4.2 Построение графика приведенных моментов сил 4.3 Построение графиков работ 4.4 Построение диаграммы энергомасс 4.4 Определение размеров маховика 23 Литература23
Структурный анализ механизма
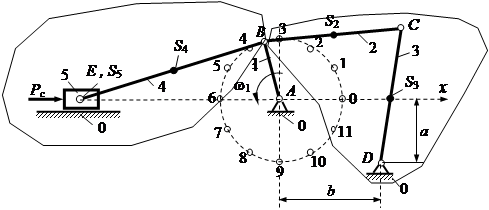
1.1 Схема заданного механизма
Рис. 1
1.2 Определение степени подвижности механизма
Степень подвижности механизма определяем по формуле Чебышева:
где: n – число подвижных звеньев; p 5 – число кинематических пар 5–го класса; p 4 – число кинематических пар 4–го класса. Степень подвижности заданного механизма равна:
Значит, для однозначного определения положения всех звеньев достаточно задать положение только одного звена механизма.
1.3 Разложение механизма на структурные группы Ассура, определение их класса, порядка и вида.
Из представленной схемы видно, что механизм состоит из механизма 1–го класса (звенья 0 и 1) и присоединённых к нему двух групп Ассура второго класса второго порядка.
1.4 Определение формулы строения механизма, его класса и порядка
Формула строения механизма имеет вид:
Класс и порядок механизма определяется по наивысшему классу группы Ассура, которая входит в его состав. Значит данный механизм – второго класса, второго порядка.
Кинематическое исследование механизма
2.1 Планы положений механизма
Планы 12 положений механизма изображаются на первом листе чертежа курсового проекта. Они нужны для того, чтобы: а) показать положение всех звеньев механизма в различные моменты времени, б) определить ход ползуна, в) определить угол размаха коромысла, г) показать траекторию движения какой – либо точки. В данном задании – траекторию движения центра масс шатуна 4 (точка S4 ). Построение проводим в масштабе. Под масштабом понимают отношение действительной длины звена в метрах, к длине звена на чертеже в мм, например: Принимаем в нашем случае (l1) = 40 мм. Тогда масштаб длин будет:
Теперь можно определить все остальные размеры на чертеже по формуле: Эти размеры будут:
Далее чертим планы механизма в 12 положениях, используя рассчитанные длины и расстояния. Затем строим предельные положения механизма и определяем ход ползуна НЕ (в метрах) и угол размаха коромысла g (в градусах).
2.2 Планы скоростей механизма
Планы скоростей механизма изображаются на первом листе чертежа. Они нужны для того, чтобы: а) определить величину и направление скорости любой точки механизма в различные моменты времени, б) определить угловые скорости звеньев в различные моменты времени.
Построение планов скоростей проводим в соответствии с формулой, известной из теоретической механики:
где:
Для того, чтобы начертить планы скоростей, сначала нужно вычислить скорость точки В кривошипа АВ. Эту скорость определяем по формуле:
где:
В нашем случае:
Эту скорость нужно показать на чертеже в виде вектора, перпендикулярного кривошипу АВ и имеющего длину
Для определения скорости точки С записываем векторные уравнения вида (1):

Для определения скорости точки Е – аналогичные векторные уравнения:
Далее строим планы скоростей для каждого положения механизма, используя в каждом из них вектор
где:
Угловые скорости вращательного движения звеньев 2, 3, 4 можно рассчитать по формуле
где:
Результаты вычислений
2.3 Планы ускорений механизма
Планы ускорений механизма изображаются на первом листе чертежа. Они нужны для того, чтобы: а) определить величину и направление ускорения любой точки механизма в различные моменты времени, б) определить угловые ускорения звеньев в различные моменты времени.
Построение планов ускорений проводим в соответствии с формулами, известными из теоретической механики:
где:
является поступательное движение (кулиса). (6)
В этих формулах:
Для того, чтобы изобразить планы ускорений, сначала нужно вычислить ускорение точки В кривошипа АВ. Это ускорение определяем по формуле:
где:
В нашем случае: Это ускорение нужно показать на чертеже в виде вектора, параллельного кривошипу АВ и имеющего длину
Вычисляем нормальное ускорение точки С в относительном движении вокруг точки В по формуле (7):
Вычисляем длину отрезка, изображающего это ускорение на чертеже
Вычисляем нормальное ускорение точки Е в относительном движении вокруг точки В по формуле (7):
Вычисляем длину отрезка, изображающего это ускорение на чертеже
Аналогичные операции производим для всех 12 положений механизма, результаты заносим в таблицу 2. Таблица 2
Далее строим планы ускорений для 12 положений механизма в соответствии с векторными уравнениями (4)÷(6), используя данные таблицы 2. После их построения определяем величины ускорений всех характерных точек механизма (абсолютные и относительные), используя формулу:
где:
Угловые ускорения звеньев 2, 3, 4 можно рассчитать по формуле
где:
Результаты вычислений
Таблица 3
2.4 Диаграммы перемещений, скоростей и ускорений ползуна
Кинематические диаграммы – это графическое изображение перемещений, скоростей и ускорений отдельных точек механизма как функций времени или угла поворота кривошипа:
S = S(t) , V = V(t) , а = а (t) , или S = S(j) , V = V(j), а = а (j) , Если построены планы 12 положений механизма, то можно построить кривую S(t), а затем, используя приёмы графического дифференцирования, построить кривые V(t) и а(t) .
Порядок построения: 1. Проводим оси кинематических диаграмм. 2. Откладываем на оси времени отрезок l = (150÷200) мм, соответствующий времени одного полного оборота кривошипа. Принимаем l = 180 мм. При этом масштаб времени будет :
3. Масштаб перемещений ms принимаем равным или кратным масштабу ml плана положений механизма. 4. Строим диаграмму перемещений ползуна S = S(j), используя планы положений механизма. 5. Для того, чтобы отрезки на оси ординат диаграммы скоростей были равны отрезкам на планах скоростей, построенных ранее, необходимо найти полюсное расстояние HV. Вычисляем его по формуле
где : 6. Строим диаграмму скоростей ползуна V = V(j), используя приёмы графического дифференцирования (метод хорд). 7. Вычисляем полюсное расстояние Ha по аналогичной формуле
где : 8. С помощью построенной диаграммы скоростей V = V(j) строим диаграмму ускорений а = а (j), используя тот же метод хорд.

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|
 18
18 19
19 ,
,  ,
,  21
21 .
.



 ; длину кривошипа на чертеже должна быть (l1) = 40¸70 мм.
; длину кривошипа на чертеже должна быть (l1) = 40¸70 мм.






 (1)
(1) – абсолютная скорость точки;
– абсолютная скорость точки; – переносная скорость выбранного полюса;
– переносная скорость выбранного полюса; – скорость точки относительно выбранного полюса.
– скорость точки относительно выбранного полюса.
 – модуль скорости точки В;
– модуль скорости точки В; – заданная угловая скорость движения кривошипа,
– заданная угловая скорость движения кривошипа,  ;
; – заданная длина кривошипа (в метрах).
– заданная длина кривошипа (в метрах).
 мм . Принимаем
мм . Принимаем  мм . Тогда масштаб будущего плана скоростей
мм . Тогда масштаб будущего плана скоростей  будет:
будет:


 и векторные уравнения (2) и (3). После построения всех 12 планов скоростей определяем величины скоростей всех характерных точек механизма, используя формулу:
и векторные уравнения (2) и (3). После построения всех 12 планов скоростей определяем величины скоростей всех характерных точек механизма, используя формулу:
 – длина вектора скорости характерной точки на плане скоростей;
– длина вектора скорости характерной точки на плане скоростей;
 – относительная скорость, полученная из плана скоростей,
– относительная скорость, полученная из плана скоростей,  ;
; – длина соответствующего звена, [м].
– длина соответствующего звена, [м]. и
и  сводим в таблицу 1.
сводим в таблицу 1.
 , (4)
, (4) – если относительное движение является вращательным, (5)
– если относительное движение является вращательным, (5) – если в относительном движении одним из составляющих
– если в относительном движении одним из составляющих – абсолютное ускорение точки;
– абсолютное ускорение точки; – полное относительное ускорение точки;
– полное относительное ускорение точки; – нормальное относительное ускорение точки; (7)
– нормальное относительное ускорение точки; (7) – тангенциальное относительное ускорение точки;
– тангенциальное относительное ускорение точки; – ускорение Кориолиса; (8)
– ускорение Кориолиса; (8) – относительное ускорение точки вдоль оси кулисы;
– относительное ускорение точки вдоль оси кулисы;
 – модуль ускорения точки В;
– модуль ускорения точки В;
 мм . Принимаем
мм . Принимаем  мм . Тогда масштаб будущего плана ускорений
мм . Тогда масштаб будущего плана ускорений  будет:
будет:

 .
.

 .
. .
.




 – действительное ускорение данной точки (абсолютное или относительное),
– действительное ускорение данной точки (абсолютное или относительное), – длина вектора ускорения данной точки на плане ускорений, [мм].
– длина вектора ускорения данной точки на плане ускорений, [мм].
 – относительное ускорение, полученное из плана ускорений,
– относительное ускорение, полученное из плана ускорений,  ;
; сводим в сводную таблицу 3.
сводим в сводную таблицу 3.













 [мм].
[мм]. [мм].
[мм].