
|
|
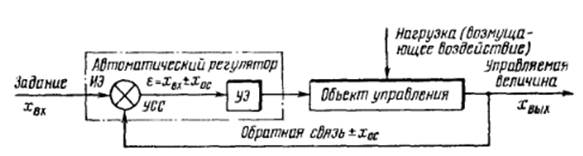
НАЗНАЧЕНИЕ, УСЛОВИЯ И ПРИНЦИП ДЕЙСТВИЯ САУ ПОЛЕМ ТЯГОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ С ПРИМЕНЕНИЕМ ПОЛУПРОВОДНИКОВЫХ ПРИБОРОВВВЕДЕНИЕ Автоматическое управление — это такой способ управления, при котором необходимые операции выполняются посредством системы, функционирующей без вмешательства человека, в соответствии с заранее заданными условиями. Функции автоматического управления могут быть чрезвычайно многообразными. Применительно к оборудованию тепловозов это могут быть: поддержание необходимых режимов работы машин и агрегатов; поддержание постоянными или изменение по заданным законам каких-либо физических величин, характеризующих режимы работы; включение и выключение машин и агрегатов; реверсирование ТЭД и их торможение; осуществление определенной последовательности операций; защита от недопустимых режимов работы; контроль состояния физических величин или режимов работы. Совокупность объекта управления и автоматических управляющих устройств называется системой автоматического управления(САУ). Два основных принципа автоматического управления. Основным признаком, по которому могут быть подразделены САУ, является воздействие на систему управления действительного состояния объекта управления. Если в системе происходит непрерывный контроль управляемой величины и в зависимости от ее значения осуществляется воздействие на объект управления, то такая система называется САУ по отклонению управляемой величины(такую систему иногда называют системой автоматического регулирования САР). Ноли воздействие на объект управления осуществляется вне зависимости от состояния управляемой величины, то такая система называется системой автоматического управления (САУ) по возмущающему воздействию (или системой автоматического управления по произвольно изменяемой нагрузке). В комбинированных системах автоматическогоуправлениясочетаются оба принципа управления, как по возмущающему воздействию, так и по отклонению управляемой величины. Структурная схема САУ по отклонению управляемой величины представлена на рис.1. Здесь управляемая величина воздействует на вход регулятора через обратную связь. Обратной связьюв общем случае называется воздействие (сигнал) от управляемой величины на вход системы или, другими словами, на работу регулятора. Сигналамназывается физическая величина, используемая для передачи команды или информации. Если система состоит из нескольких последовательно включенных элементов, то воздействие от управляемом величины на вход системы называется главной обратной /вязью,а воздействие от выхода какого-либо элемента на вход предыдущего (но цепи прохождения сигнала) называется дополнительной (местной) обратной связью.Если обратная связь увеличивает воздействие входного сигнала на выходной (сигнал обратной связи складывается с входным сигналом), то она называется положительной обратной связью. Если же указанное воздействие уменьшается (сигнал обратной связи вычитается из входного), то это будет отрицательная обратная связь(см. рис. 4).
Рис. 1. Структурная схема САУ по отклонению управляемой величины. В САУ электрической передачи, как и в других технических системах, преимущественно применяется отрицательная обратная связь, которая улучшает переходные процессы, повышая устойчивость И быстродействие системы. Различают жесткую (апатическую) и гибкую (исчезающую) обратные связи.При жесткой обратной связи ее выходное воздействие всегда пропорционально входному сигналу (как при переходных, так и при установившихся процессах). Введение жесткой обратной связи обеспечивает статическую стабилизирующую САУ. Гибкая обратная связь действует только при переходных процессах и исчезает при установившемся режиме. При гибкой обратной связи система управления является астатической стабилизирующей. Система автоматического управления с обратной связью является замкнутой.При отклонении управляемой величины от заданного значения по любой причине происходит такое воздействие на объект управления, которое устраняет это отклонение.
НАЗНАЧЕНИЕ, УСЛОВИЯ И ПРИНЦИП ДЕЙСТВИЯ САУ ПОЛЕМ ТЯГОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ С ПРИМЕНЕНИЕМ ПОЛУПРОВОДНИКОВЫХ ПРИБОРОВ
Степень управления тягового генератора (или диапазон изменения тока и напряжения его) ограничена, как правило, габаритом тягового генератора, насыщением его магнитной системы, а также условиями коммутации. Поэтому использование полной мощности тягового генератора может быть лишь в определенном интервале тока нагрузки его, а следовательно, скорости движения поезда. При превышении какой-то скорости движения, когда ток нагрузки тягового генератора падает ниже определенного значения (для тяговых генераторов ГП-311Б тепловозов ЗТЭ10М, 2ТЭ10М, 2ТЭ10В, 2ТЭ10Л — ниже 2900 А, для тяговых генераторов ГП-311В тепловозов ТЭП60 — 3150 А), возросший ток возбуждения генератора приводит к насыщению магнитной системы и ограничению напряжения. При ограничении напряжения снижение тока нагрузки вызывает пропорциональное уменьшение реализуемой мощности. Чтобы уменьшить необходимую степень управления тягового генератора или использовать полную мощность уже построенного генератора в более широком интервале скоростей движения, приходится при высоких скоростях искусственно увеличивать ток нагрузки генератора. Это достигается за счет автоматического управления ТЭД путем ослабления возбуждения(ослабления магнитного поля). На тепловозах раннего выпуска (ТЭ1, ТЭ2, ТЭМ1) расширение интервала скоростей, при котором используется полная мощность дизель-генераторной установки, осуществляется переключением ТЭД с последовательного на последовательно-параллельное соединение. Ослабление возбуждения ТЭД осуществляется при помощи резисторов, которые подключаются параллельно обмоткам возбуждения. При этом ток в обмотке возбуждения двигателей уменьшится и произойдет ослабление возбуждения (магнитного поля). Степенью ослабления возбужденияназывается отношение тока возбуждения к току якоря.
Степень ослабления возбуждения может быть выражена и в процентах. Чем меньше сопротивление резисторов, которые подключены параллельно обмоткам возбуждения двигателей, тем больше ослабление возбуждения их или, другими словами, тем меньше степень ослабления возбуждения. На тепловозах ЗТЭ10М, 2ТЭ10М, 2ТЭ10В* 2ТЭ10Л, 2ТЭ116 и ТЭП60 с тяговыми электродвигателями ЭД-107, ЭД-107А, ЭД-118А, ЭД-118Б или ЭД-108, ЭД-108А степень ослабления возбуждения первой ступени составляет 60 %, а второй ступени —36 %. Это значит, что через обмотки возбуждения двигателей проходит 60 % (или 36 %) тока, а остальная часть тока протекает через шунтирующие резисторы. Сила тяги на ободе колес FK пропорциональна току двигателя (рис. 2) или в данном случае лучше сказать, что при движении тепловоза потребляемый двигателями ток пропорционален реализуемой силе тяги или силе сопротивления движению. Сила тяги тем меньше, чем меньше степень ослабления возбуждения а или чем меньше магнитный поток полюсов Ф. Это можно выразить равенством:
где Увеличение тока, потребляемого ТЭД тепловоза, при ослаблении возбуждения может быть объяснено следующим образом. Сила тяги FK двигателя, как видно из равенства, пропорциональна току якоря и магнитному потоку Ф. В момент включения ослабления возбуждения сила тяги FK

практически измениться не может, а магнитный поток Ф быстро уменьшается. Это возможно благодаря саморегулированию двигателей лишь при возросшем токе. Увеличение тока тем больше, чем меньше степень ослабления возбуждения. Увеличение тока тягового генератора позволяет обеспечить его работу при полной мощности и тем самым увеличить скорость движения, при которой используется полная мощность. Чем меньше степень ослабления возбуждения или чем больше увеличение тока генератора, тем до больших скоростей движения используется полная мощность дизель-генератора (рис.4). Таким образом, ослабление возбуждения ТЭД тепловозов расширяет интервал скоростей, при котором используется полная мощность дизель-генератора. Значение степени ослабления возбуждения второй ступени подбирают таким образом, чтобы обеспечить использование полной мощности дизель-генератор, а вплоть до конструкционной скорости тепловоза. Ослабление возбуждения первой ступени применяют для уменьшения скачков тока при переключении с полного возбуждения на ослабленное (и наоборот). Включение каждой ступени ослабления возбуждения должно быть при таких скоростях, когда ток генератора близок к минимальному значению, при котором используется полная мощность. Выключение ослабления возбуждения производится при скоростях на 4—10 км/ч меньших, чем скорость включения (во избежание звонковой работы).

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|


 — постоянная двигателя, зависящая от количества полюсов и параметров обмотки якоря.
— постоянная двигателя, зависящая от количества полюсов и параметров обмотки якоря.