|
|
Измерения фазовых дрожанийСИНХРОНИЗАЦИЯ СЕТИ, КОНТРОЛЬ И УПРАВЛЕНИЕ
Требования к синхронизации систем передачи включают в себя: восстановление колебания несущей для когерентного приема модулированных сигналов, восстановление колебаний тактовой частоты для регенерации входного цифрового сигнала и выполнение операций вхождения в цикловый синхронизм для определения положения отдельных каналов в цикле с временным группообразованием. Каждая из этих функций присуща цифровым системам передачи и выполняются они большей частью независимо от другого оборудования сети. Пример зависимости одной системы от другой отмечался для линий типа Т1. Цифровой сигнал источника в этих линиях должен обеспечивать минимальную плотность единиц для поддержания хронирования в линии передачи. В противоположность этому имеются и другие коды передачи, которые поддерживают тактовую синхронизацию независимо от цифрового сигнала источника. В этом курсе рассматриваются общие вопросы синхронизации, связанные с взаимодействием различного оборудования цифровой передачи и коммутации. Главным из них является координация работы оборудования синхронной передачи и коммутации. Когда отдельные комплекты синхронного оборудования соединяются для того, чтобы образовать сеть, появляется необходимость в реализации определенных процедур, при которых обеспечивается либо синхронизация задающих генераторов друг с другом, либо такая совместная работа оборудования, когда каждая из подсистем имеет независимый задающий генератор. После рассмотрения тактовой синхронизации сети концепция синхронизации расширяется, охватывая аспекты управления сетью высокого уровня. Эти соображения включают в себя управление соединениями, маршрутизацию и управление потоками.
1. Нестабильности хронирующих сигналов
Все цифровые системы в своей основе требуют задающего генератора как средства хронирования внутренних и внешних операций. Операции, хронируемые от источника единственной частоты, Не нуждаются в особенно стабильных источниках, поскольку все элементы, хронируемые совместно, испытывают однотипные изменения хронирующего колебания. Другая ситуация возникает, когда осуществляются переходы от одного синхронизируемого оборудования к другому (например, от передатчика к приемнику). Если даже задающий генератор приемного полукомплекта синхронизированс генератором передающего полукомплекта на долгосрочной основе или при усреднении за длительный период времени, то при кратковременных изменениях в любом из задающих генераторов может быть нанесен серьезный ущерб целостности передаваемых цифровых сигналов. Поэтому, как правило, необходимо использовать в передатчике и приемнике генераторы частоты такой стабильности, какая целесообразна из экономических соображений.
1.1. Фазовые дрожания хронирующих колебаний
Как бы ни были стабильны частоты генераторов на обоих концах цифровой линии передачи, из-за внешних электрических помех и изменения физических параметров линии передачи в сигнале на приеме неизбежно возникают определенные нестабильности. Результирующую нестабильность тактовой частоты линейного сигнала называют фазовыми дрожаниями хронирующих колебаний. Основными причинами фазовых дрожаний являются: 1) шум и помехи, воздействующие на цепь синхронизации в приемнике; 2) изменения длины тракта; 3) изменения скорости распространения; 4) доплеровские сдвиги от подвижных оконечных устройств; 5) нерегулярное поступление хронирующей информации. Шум и помехи. Для синхронизации задающих генераторов приемника и передатчика обычно используется цепь фазовой автоподстройки, как показано на рис. 1. Фазовый детектор непрерывно измеряет разность фаз между колебаниями тактовой частоты местного генератора и колебаниями, полученными из входного сигнала. Сигнал с выхода фазового детектора подается на фильтр, чтобы в возможных пределах максимально уменьшить уровень принимаемых шумов, а затем по результатам измерения фазы подстраивается частота генератора, управляемого напряжением (ГУН), чтобы уменьшить разность фаз. Некоторый уровень шума и помех неизбежно остается на выходе фазового детектора и фильтра, вызывая ошибочные подстройки частоты ГУН. Однако смещения частоты создают все более увеличивающиеся со временем сдвиги фазы. Когда разность фаз нарастет, становится легче ее обнаружить и произвести соответствующие изменения в ГУН. Следовательно, в местном задающем генераторе поддерживается требуемая средняя частота, но обязательно имеются определенные фазовые дрожания, хотя генератор непрерывно отслеживает тактовую частоту передатчика.
Рис. 1. Схема восстановления колебаний тактовой частоты с цепью фазовой автоподстройки
При больших отношениях сигнал-шум фазовые сдвиги малы и вредных результатов не возникает. По мере увеличения относительного уровня шума фазовые дрожания увеличиваются, а не совсем оптимальные моменты решений увеличивают коэффициент ошибок. При очень низких отношениях сигнал-шум цепь с фазовой автоподстройкой может вообще потерять синхронизм. Потеря синхронизма по тактовой частоте даже на несколько периодов может привести к достаточно серьезным последствиям: не только появятся ошибки, но может также возникнуть искажение числа принятых двоичных символов, при котором нарушается цикловый синхронизм на всех уровнях. При проскальзывании восстановленной тактовой частоты по отношению к тактовой частоте в линии линия передачи, по существу, разрывается до тех пор, пока не будет обнаружена потеря синхронизма, и синхронизм не будет восстановлен на всех уровнях. Обычно перед тем, как в цепях восстановления колебаний тактовой частоты происходит потеря синхронизма, в линии передачи возникает недопустимая частость ошибок. При расчете линий цифровой передачи важным соображением является накопление фазовых дрожаний в последовательно включенных цепях восстановления колебаний тактовой частоты. Если восстановленные колебания тактовой частоты используются для хронирования передачи исходящего цифрового сигнала, как в регенераторе, то фазовые дрожания принятого сигнала воздействуют на колебания тактовой частоты исходящего сигнала. Цепь восстановления колебаний тактовой частоты в следующем приемнике отслеживает принятые колебания тактовой частоты, но вносит также добавочные фазовые дрожания из-за шума и помех на втором участке. Таким образом, с каждым регенератором, использующим колебания тактовой частоты, которые получены из принятого линейного сигнала, для управления передачей, фазовые дрожания накапливаются. Если число регенераторов велико, то фазовые дрожания могут накопиться до такого уровня, что в последующих цепях восстановления колебаний тактовой частоты будет трудно отслеживать Принятое хронирующее колебание, возникнут ошибки определения моментов решения и, возможно, система выйдет из режима захвата. Изменения длины тракта. Изменения длины тракта происходят в результате температурного расширения или сжатия среды передачи или в результате изгиба радиотракта в атмосфере. При удлинении тракта эффективная скорость передачи на входе приемника уменьшается, поскольку все больше и больше битов «накапливается» всреде передачи. Аналогично, при укорочении тракта скорость передачи на входе приемника увеличивается, поскольку число битов, «накопленных» в линии передачи, уменьшается. После того как длина тракта стабилизируется, восстанавливается номинальная скорость передачи цифрового сигнала. Наиболее значительны изменения длины тракта при связи через спутники. Для современных Спутников на геостационарной орбите изменения длины тракта составляют примерно 300 км, что соответствует изменениям времени прохождения примерно на 1 мс [I]. Пример 1. Определите изменение длины тракта, изменение числа битов в тракте и относительное изменение скорости передачи цифрового сигнала на приеме в линии передачи типа Т2 длиной 800 км на медных парах кабеля сортамента 22. Предполагается, что температура изменяется на 20°С за 1 ч. Решение. Коэффициент температурного расширения для меди и скорость распространения по парам кабеля сортамента 22, которые можно найти в [2], составляют соответственно 16,5. 10-6/°С и 47 300 км/с1. Таким образом, изменение длины тракта ∆d = 800∙16,5∙10-6∙20=0,264 км.
1 Эти значения параметров получены для обычных пар кабеля сортамента 22 и не обязательно относятся к кабелям с низкой емкостью, используемым для систем типа Т2.
Изменение числа битов в тракте ∆B=6,312∙106∙0,264/47 300=35,4 бита. Предполагая, что температура изменяется с постоянной скоростью, определим изменение скорости передачи цифрового сигнала: ∆R=35,4/3600=9,8 10-3 бит/с. Отсюда относительное изменение скорости передачи цифрового сигнала в точке приема (нестабильность) ∆R/R=9,8∙10-3/6,312∙106=1,56∙10-9. Хотя нестабильность тактовой частоты на приеме, полученная в примере 1, выражается очень маленьким числом, она сопоставима со значением точности тактовой частоты, полученной для цифровой сети фирмы Bell System и равной 1,7∙10-9 [3]. Важно, однако, отметить, что нестабильность вследствие изменения длины тракта является всего лишь преходящим явлением, в то время как неточности тактовой частоты определяют максимальное смещение между установившимися значениями частот задающих генераторов. Изменения скорости распространения. Изменения температуры вызывают не только удлинение и укорочение среды передачи проводных линий. Они могут также изменить те константы среды распространения, которые определяют скорость распространения. Однако результирующее изменение стабильности тактовой частоты на приемной стороне много меньше того, которое создается изменением длины тракта [4]. Скорость распространения радиоволн в атмосфере также меняется с температурой и влажностью. Хотя эти изменения скорости имеют и большее значение, чем изменение скорости распространения в проводных линиях, они все равно меньше изменений, вызванных изменением длины тракта и определенных в примере 1 [5]. Отметим, что изменение скорости распространения, в сущности, эквивалентно изменению длины тракта, поскольку меняется число битов, накопленных в тракте передачи. Доплеровские сдвиги. Наиболее значительным источником потенциальной нестабильности тактовой частоты на приеме являются доплеровские сдвиги, возникающие при движении самолетов или спутников. Например, доплеровский сдвиг при движении самолета со скоростью 500 км/ч эквивалентен нестабильности тактовой частоты, равной 5∙10-7. И снова оказывается, что доплеровские сдвиги, по существу, являются результатом изменения длины тракта. Нерегулярное поступление хронирующей информации. Как уже рассматривалось в гл. 4, фундаментальное требование к коду в цифровой линии состоит в том, чтобы он обеспечивал получение достаточной хронирующей информации для установления и поддержания колебаний тактовой частоты в приемнике на конце линии. Если уровень хронирующей информации зависит от цифрового сигнала, то фазовые дрожания в восстановленных колебаниях тактовой частоты увеличиваются в течение периодов времени с относительно низкими плотностями импульсов, от которых зависит хронирование. Амплитуда фазовых дрожаний зависит не только от плотности импульсов, но также и от структуры цифрового сигнала (в смысле содержания хронирующей информации). В идеальном регенераторе имеет значение только плотность импульсов. На практике, однако, различного рода ухудшения приводят к фазовым дрожаниям, зависящим от структуры сигнала [6]. Как показано далее в этой главе, в аппаратуре цифрового группообразования более высоких порядков в агрегатный цифровой поток для различных целей вводятся добавочные биты. При разделении агрегатного цифрового потока на компонентные скорость поступления цифрового сигнала в компонентных каналах получается нерегулярной. Эти нерегулярности создают фазовые дрожания в процессе получения новых колебаний тактовой частоты для компонентных сигналов. Этот источник возникновения фазовых дрожаний (фазовые дрожания времени ожидания) часто доставляет наибольшие неприятности. Далее он рассматривается детальнее.
1.2. Устройства эластичной памяти
Нестабильности хронирующих колебаний, описанные в предыдущих параграфах, по существу, представляют собой изменения числа битов, накопленных в линии передачи. В случае фазовых дрожаний, обусловленных шумом и помехами, изменение числа «накопленных» битов происходит вследствие того, что моменты решения наступают чуть раньше или чуть позже номинального положения. Поскольку цифровой сигнал, исходящий из регенератора, передается синхронно с восстановленными колебаниями тактовой частоты, сдвиг фазы колебаний тактовой частоты означает, что задержка в регенераторе отличается от задержки при отсутствии расхождений в хронировании. Если сдвиги фазы в последовательных регенераторах совпадают, в длинной линии передачи с регенераторами накапливается суммарное изменение на несколько битов. Поскольку эти добавочные биты вводятся или удаляются из линии за относительно короткие периоды времени, накопленные фазовые дрожания могут вызвать относительно большую, хотя и кратковременную нестабильность тактовой частоты на приемной стороне. Поскольку принятые колебания тактовой частоты, определяющие моменты решений, используются в регенераторах также и для формирования передаваемого сигнала, установившихся различий в хронировании между входными и выходными сигналами не существует. В точках окончания линии передачи, однако, возможны взаимодействия с местными задающими генераторами. В этом случае различие между принятыми колебаниями и относительно стабильными колебаниями, полученными от местного генератора, должно быть сглажено с помощью эластичной памяти. Устройство эластичной памяти представляет собой буферное устройство для цифрового сигнала, в котором запись производится с одной тактовой частотой, а считывание – с другой. Если в каждом из колебаний тактовой частоты содержится кратковременная нестабильность, отличия в числе переданных и принятых битов поглощаются в эластичной памяти. С помощью эластичной памяти можно скомпенсировать только кратковременные нестабильности, при которых отличие вчислах переданных и принятых битов ограничено. Если между тактовыми частотами существует постоянный сдвиг, как в несинхронизированных задающих генераторах высокой точности, то эластичная память, в конце концов, опустошится или переполнится. Стык между линией с временным группообразованием и коммутационнойсистемой. Обычно необходимость в эластичной памяти возникает тогда, когда линии цифровой передачи стыкуются с цифровыми коммутационными станциями с временным разделением. Как показано на рис. 2, устройства эластичной памяти размещаются между входящей линией цифровой передачи и цепями ввода в коммутационную станцию.
Рис. 2. Стык между линией передачи с временным группообразованием и цифровой коммутационной станцией, включающий устройство эластичной памяти: ПРМ — приемник, ПРД — передатчик
В большинстве случаев цифровая коммутационная станция обеспечивает хронирование для всех исходящих линий с временным группообразованием, так что между этими линиями и коммутационной станцией расхождения в смысле хронирования отсутствуют. Предположим, что аппаратура на дальнем конце цифровой линии получает колебания тактовой частоты из принимаемого сигнала и использует эти колебания для хронирования цифрового сигнала, возвращающегося к коммутационной станции. Это и есть ситуация, возникающая, когда удаленный каналообразующий блок соединяется с цифровой коммутационной станцией через линию типа Т1 (ситуацию обычно называют «заворотом по тактовой частоте» в каналообразующем блоке). При использовании заворота по тактовой частоте тактовая частота входящей линии синхронизирована по номинальному значению с тактовой частотой коммутационной станции. Однако по причинам, рассмотренным ранее, в тактовой частоте входящей линии обязательно имеется определенная нестабильность. В устройстве эластичной памяти эта нестабильность поглощается, так что на коммутационную станцию поступает чисто синхронный цифровой сигнал. По существу, в шлейфе, образованном линией передачи и устройством эластичной памяти, между входом и выходом коммутационной станции поддерживается постоянное и целое число тактовых интервалов. Таким образом, с точки зрения хронирования входы и выходы работают так, как будто они непосредственно соединены друг с другом при использовании общего источника хронирования. Удаление накопленных фазовых дрожаний.Еще одно применение эластичной памяти, где она используется в регенераторе для удаления фазовых дрожаний, обусловленных линией передачи, иллюстрирует рис. 3. В обычных условиях хронирование передаваемого сигнала в регенераторах основывается непосредственно на использовании колебаний тактовой частоты, полученных в регенераторе и служащих для определения моментов решения. На рис. 3, однако, передаваемый сигнал хронируется от отдельного местного генератора. В устройстве эластичной памяти поглощается кратковременная нестабильность тактовой частоты приема, а условие поддержания некоторого среднего уровня накопления в эластичной памяти определяет значение частоты задающего генератора для передаваемого сигнала за длительный период времени. В соответствии с этим, задающий генератор передаваемого сигнала синхронизируется тактовой частотой линии на долгосрочной, а не на кратковременной основе. Если объем эластичной памяти достаточно велик для того, чтобы поглотить все происходящие изменения скорости передачи цифрового сигнала, то «быстрые» нестабильности тактовой частоты выходного сигнала не зависят от тактовой частоты входного сигнала.
Рис. 3. Регенератор, устраняющий фазовые дрожания
Во всех регенераторах, независимо от механизма, используемого для восстановления хронирующего колебания, тактовая частота выходного сигнала получается путем усреднения хронирующей информации из входного сигнала за какой-то период времени. Резонансные контуры усредняют тактовую частоту входного сигнала за относительно небольшое число тактовых интервалов сигнала, а цепи с фазовой автоподстройкой - за большое число интервалов. Во всех случаях предполагается определенная величина накопления или задержки. Устройство эластичной памяти просто является механизмом увеличения имеющейся задержки таким образом, чтобы подстройки хронирующего колебания выходного сигнала могли быть выполнены более плавно. Как показано далее, с помощью эластичной памяти нельзя удалить фазовые дрожания со сколь угодно низкой частотой, но фазовые дрожания с низкой частотой не представляют проблемы, если колебания тактовой частоты выходного сигнала получаются из колебаний тактовой частоты входного сигнала. Варианты реализацииэластичной памяти.Требуемый объем эластичной памяти меняется от нескольких битов до нескольких сотен битов для высокоскоростных линий магистральной связи. На рис. 4 представлен один из способов реализации устройства эластичной памяти малого объема, в котором используется преобразователь последовательного сигнала в параллельный, регистр и преобразователь параллельного сигнала в последовательный. Как показано на рисунке, входной цифровой сигнал поступает в регистр по мере того, как каждая комбинация образуется на выходе преобразователя последовательного сигнала в параллельный. Некоторое время спустя цифровой сигнал из регистра переносится в преобразователь параллельного сигнала в последовательный, причем извлекается полная комбинация. Заметим, что перенос в преобразователь параллельного сигнала в последовательный не зависит от колебаний тактовой частоты входного сигнала. До тех пор, пока переносы на выходе регистра происходят между переносами на его входе, цифровой сигнал не теряется, а кратковременные фазовые дрожания поглощаются за счет изменяющихся задержек в эластичной памяти. Обычно требуется некое управляющее устройство (на рисунке не показано) для первоначальной установки эластичной памяти так, чтобы первый перенос в регистр происходил между двумя переносами на его выходе. Этот процесс означает, что вначале часть входного цифрового сигнала преобразователем последовательного сигнала в параллельный отбрасывается, пока не получится требуемое время переноса. Разница в моментах времени между параллельными переносами на входе и на выходе регистра прямо указывает на разность фаз колебаний тактовой частоты на входе и на выходе. Таким образом, колебания тактовых частот, используемые для параллельного переноса, содержат информацию, необходимую для получения напряжения, управляющего ГУН, если эластичная память используется для удаления накопленных при передаче фазовых дрожаний.
Основную структуру, показанную на рис. 4, можно использовать для реализации эластичной памяти большого объема, как показано на рис. 5. Единственное изменение состоит в замене регистра на рис. 4 на буферное устройство, работающее в режиме FIFO (считывание в порядке поступления)1. Такое буферное устройство для цифровых сигналов специально рассчитано на то, чтобы обеспечить ввод входного сигнала под управлением колебания одного генератора, в то время как вывод зависит от колебаний другого генератора. В обычных условиях работа буферного устройства в режиме FIFO начинается с запрета считывания на выходе до тех пор, пока буферная память не заполнится наполовину. Некоторые из имеющихся в продаже разновидностей блоков обработки сигнала в порядке поступления формируют на выходе специальный сигнал, указывающий на заполнение половины (или большей части) объема буферной памяти. 1 В отечественной литературе по теории телетрафика эта дисциплина обслуживания называется обслуживанием в порядке поступления. Кроме того, иногда используется термин «естественная дисциплина обслуживания». В литературе по вычислительной технике большее распространение получил термин «первым пришел, первым обслужен.
Измерения фазовых дрожаний
Простая схема измерения фазовых дрожаний приведена на рис. 6. Какздесь показано, она представляет собой не что иное, как цепь фазовой автоподстройки, где измерение фазовых дрожаний хронирующего колебания производится на выходе фазового компаратора. В обычных условиях ширина полосы фильтра нижних частот весьма мала, так что на ГУН не влияют кратковременные фазовые дрожания хронирующего сигнала. Если фазовых дрожаний вообще нет, то сигнал на выходе фазового компаратора представляет собой постоянный ток, и на выход фильтра верхних частот сигнал не проходит. В схеме на рис. 6 нельзя измерить фазовые дрожания с очень низкими частотами, поскольку ГУН отслеживает медленно изменяющиеся фазовые сдвиги.
Рис. 6. Схема измерения фазовых дрожаний хронирующего колебания компаратора
На фазовые дрожания с очень низкими частотами, однако, можно не обращать внимания, поскольку их можно отслеживать цепью фазовой автоподстройки. Фазовые дрожания с более высокими частотами, с другой стороны, чаще могут вызвать ошибки при принятии решения или потерю синхронизма при восстановлении колебаний тактовой частоты в регенераторе. Вследствие этого интерес представляют как спектр, так и амплитуда фазовых дрожаний. Фазовые дрожания обычно нормируются, как при измерениях мощности, в единицах радиан в квадрате или периодов в квадрате. Как показано на рис. 7, мощность фазовых дрожаний представляет собой меру дисперсии числа тактовых интервалов, накопленных в линии передачи. В этом случае фазовые дрожания выражаются в единицах периодов тактовой частоты, возведенных в квадрат. «Мощность» фазовых дрожаний большого физического смысла не имеет, поскольку она отражает изменения фазы хронирующего колебания, а не мощность. Некоторое физическое оправдание для того, чтобы выражать фазовые дрожания в виде мощности, можно получить из того, что значение мощности сигнала на выходе фазового детектора
где Kd - коэффициент усиления фазового детектора в вольтах на радиан, а
Рис. 7. Фазовые дрожания, представленные как изменение числа символов, накопленных в линии передачи
Пример 2.Задавшись средним квадратическим значением фазовых дрожаний, равным 10,7 дБ по отношению к одному тактовому интервалу в квадрате, определим стандартное отклонение сдвига фазы. Решение.Дисперсия фазы сигнала определяется как Если фазовые дрожания возникают вследствие воздействия аддитивного гауссовского шума на стабильный сигнал, то фазовые шумы могут быть аппроксимированы следующим образом:
где Выражение (2) является основной формулой для фазовых дрожаний, порождаемых воздействием аддитивного шума на непрерывную синусоиду [7]. Когда хронирующее колебание извлекается из цифрового сигнала, хронирующая информация обычно не является непрерывной. Это свойство несущественно, так как фазовые дрожания из-за аддитивного шума обычно невелики по сравнению с фазовыми дрожаниями из-за других причин [8]. Анализ фазовых дрожаний, создаваемых регенераторами, работающими при случайно расположенных хронирующих переходах, проведен в [9]. 1.4. Систематические фазовые дрожания
Первоначальный анализ фазовых дрожаний в цепочке регенераторов был проведен в [6]. Основная модель для их анализа представлена на рис. 8.
Рис. 8. Модель систематических фазовых дрожаний в цепочке регенераторов:
В каждом из регенераторов в линии системы передачи типа Т хронирующее колебание извлекается из принятого сигнала и передается к следующему регенератору в качестве колебания тактовой частоты передачи. Вследствие несовершенств реализации (в первую очередь, межсимвольной интерференции) цепей восстановления хронирующего колебания (резонансные контуры в линиях типа Т1) фазовые дрожания, порождаемые регенераторами, зависят от структуры цифрового сигнала. При одном из наихудших вариантов последовательности создается крайнее значение задержки фазы. Крайнее значение опережения фазы создает другой вариант последовательности. Когда в последовательности цифрового сигнала происходит переход от одного наихудшего варианта к другому, возникает сдвиг фазы. Поскольку все регенераторы реализованы, в общем, одинаково, фазовые дрожания, порождаемые отдельными регенераторами, имеют тенденцию к когерентности. Вследствие систематической природы фазовых дрожаний такого вида они становятся в конце цепочки регенераторов самым существенным источником накопленных в линии фазовых дрожаний колебания тактовой частоты. Накопленные в линии фазовые дрожания колебаний тактовой частоты в первую очередь имеют значение для стыка хронирующего сигнала аппаратуры группообразования высших порядков или коммутационной станции. В обоих случаях входной цифровой поток с помощью эластичной памяти синхронизируется с тактовой частотой местного генератора. Особое значение накопленные фазовые дрожания имеют на стыке коммутационной станции при использовании заворота по тактовой частоте в каналообразующем блоке (см. рис. 2), поскольку тактовая частота местного генератора является фиксированной, а эластичная память должна поглощать все фазовые дрожания. Объем эластичной памяти в аппаратуре группообразования более высокого порядка может быть несколько меньше, так как эффективную скорость передачи компонентного сигнала на выходе можно изменять, используя способ, называемый согласованием скоростей (описывается далее в этой главе). В отдельном регенераторе накопленные фазовые дрожания не имеют такого значения, как фазовые дрожания колебаний тактовой частоты входного сигнала относительно колебаний тактовой частоты местного генератора, служащих для определения моментов решения и передачи. Этот последний вид фазовых дрожаний может привести к ошибкам при принятии решений. Та часть накопленных фазовых дрожаний, которая отслеживается местной цепью восстановления колебаний тактовой частоты, не имеет значения. Накопленные фазовые дрожания важны только в тех стыках хронирующих сигналов, где местный задающий генератор не может быть подстроен или подстраивается только в небольшой степени.
2. Неточности хронирования
В предыдущем разделе были рассмотрены свойства некоторых видов нестабильностей или преходящих изменений хронирующего колебания. Хотя эти изменения и соответствуют сдвигам частоты задающего генератора линии, эти сдвиги являются только временными и могут быть поглощены устройствами эластичной памяти. В ряде случаев бывает необходимо соединить устройства цифровой связи, использующие автономные источники частоты. В этих случаях значения тактовых частот двух систем никогда точно не совпадают, как бы точно ни были рассчитаны источники частоты. Сдвиг между двумя тактовыми частотами, как бы он ни был мал, создает такие требования к взаимным соединениям, какие не могут быть выполнены с помощью лишь устройств эластичной памяти.
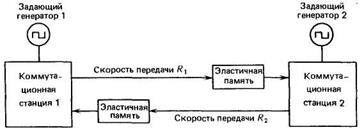
Рис. 9. Связь между коммутационными станциями, хронируемыми автономно
В предыдущем разделе был упомянут заворот по тактовой частоте в каналообразующем блоке в качестве примера того, как от цифровой коммутационной станции синхронизируется удаленное оконечное устройство. Если удаленное оконечное устройство представляет собой другую цифровую коммутационную станцию, использующую в качестве эталона свой собственный источник частоты, это приводит к другой ситуации. Как показано на рис. 9, тактовая частота исходящего сигнала для каждого направления передачи определяется тактовой частотой местного задающего генератора коммутационной станции. В соответствии с этим колебание тактовой частоты входящего сигнала на каждом стыке коммутационной станции содержит не только фазовые дрожания, обусловленные линией передачи, но также и маленький, но неизбежный сдвиг частоты. МККТТ рекомендует, чтобы первичный сигнал со скоростью передачи 2,048 Мбит/с имел допуск на скорость передачи, равный 50 10-6 [10].
2.1. Проскальзывания Как показано на рис. 9, на стыке каждой входящей цифровой линии обязательно содержится устройство эластичной памяти, предназначенное для удаления фазовых дрожаний хронирующего колебания, которые обусловлены линией передачи. В первой цифровой коммутационной станции запись в эластичную память производится с помощью восстановленных из линейного сигнала колебаний тактовой частоты, а считывание осуществляется с частотой местного генератора R1. Если среднее значение тактовой частоты R2отличается от R1то эластичная память постепенно опустошается или переполняется в зависимости от того, какая из частот больше. Если R2больше R1, то эластичная память первой цифровой коммутационной станции переполняется, что приводит к потере цифрового сигнала. Если R2 меньше R1, то эта эластичная память опустошается, что заставляет вносить посторонний цифровой сигнал в цифровой поток, вводимый в коммутационную станцию. Обычно посторонний цифровой сигнал представляет собой повторение одного или большего числа битов цифрового сигнала, уже введенных в коммутационную станцию. Разрывы в потоке цифрового сигнала, обусловленные опустошением или переполнением эластичной памяти, называют проскальзываниями. Неуправляемые проскальзывания представляют собой весьма существенные ухудшения работы цифровой сети. Проскальзывания наносят наибольший вред, если они приводят к потере циклового синхронизма. Поэтому допускается, чтобы проскальзывания происходили только таким заранее установленным образом, чтобы не нарушить цикловый синхронизм. Один из общих подходов к управлению проскальзываниями состоит в том, чтобы обеспечить их появление только в форме повторения или удаления целого цикла. В результате этого счетчики тактовых интервалов и логические устройства цикловой синхронизации, связанные с группообразованием, остаются синхронизированными. Образование управляемых проскальзываний в виде целых циклов можно обеспечить, если использовать эластичную память объемом не менее одного цикла. При проскальзывании уровень заполнения эластичной памяти фактически увеличивается или уменьшается на целый цикл. Необходимый эффект легче получить, не производя фактических удалений и вставок циклов информации, а используя указатели индексирующего адреса в памяти с произвольным доступом. Такая система показана на рис. 10.
Рис. 10. Работа эластичной памяти объемом в один цикл
В эластичную память на рис. 10 последовательно записывается информация с входа по адресам памяти, соответствующим отдельным каналам при временном группообразовании. Считывая информацию по тем же адресам в той же последовательности, можно получить на выходе цифровые сигналы отдельных каналов. В идеальном случае, когда нет сдвига между частотами задающих генераторов, моменты считывания для каждого из каналов расположены посредине между моментами записи соответствующих каналов. Тогда эластичная память Способна поглотить изменения задержки в передаче, равные времени Передачи цикла. 
Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|






 пропорционально среднему квадратическому значению фазовых дрожаний
пропорционально среднему квадратическому значению фазовых дрожаний  :
: , (1)
, (1)
 тактовых интервалов в квадрате. Отсюда стандартное отклонение равно
тактовых интервалов в квадрате. Отсюда стандартное отклонение равно  тактовых интервала. Поскольку при нормальном распределении вероятностей в пределах одного стандартного отклонения находится 68 % площади, ограниченной кривой нормального распределения вероятностей, фаза этого сигнала находится в пределах ± 3,43 тактового интервала в течение 68 % времени. В течение одного процента времени фаза сигнала будет находиться за пределами 2,6 стандартных отклонений, или ± 8,9 тактовых интервалов.
тактовых интервала. Поскольку при нормальном распределении вероятностей в пределах одного стандартного отклонения находится 68 % площади, ограниченной кривой нормального распределения вероятностей, фаза этого сигнала находится в пределах ± 3,43 тактового интервала в течение 68 % времени. В течение одного процента времени фаза сигнала будет находиться за пределами 2,6 стандартных отклонений, или ± 8,9 тактовых интервалов. , (2)
, (2) - мощность аддитивного шума, Ps - мощность сигнала, а
- мощность аддитивного шума, Ps - мощность сигнала, а 
 - фазовые сдвиги, вызываемые наихудшим вариантом последовательности цифрового сигнала соответственно для опережающей и отстающей фазы
- фазовые сдвиги, вызываемые наихудшим вариантом последовательности цифрового сигнала соответственно для опережающей и отстающей фазы