|
|
Как сделать вибрационную мышь из обычной оптической мышиДатчики от мышки Ответить Датчики от мышки gudre » 06 июн 2006, 13:49 Я толком и не понял, можно ли использовать оптопары от старой мышки для line tracer'а ? Просветите меня, кому не лень. Vovan » 06 июн 2006, 21:58 Проверил просто: фототранзистор (мыши) на омметр, ИК светодиод (мыши) через резистор к батарейке - получилась оптопара, которая хорошо видит отраженный ИК свет и уверенно различает чёрную линию на белом листе. gudre » 07 июн 2006, 14:02 у моего фототранзистора 3 ножки ... может выход уже с гистерезой ? Vovan » 07 июн 2006, 22:57 У многих ф.транзисторов по три ноги (можно даже сказать у большинства), но это не мешает использовать две ноги в данном случае. gudre » 13 июн 2006, 12:48 спасибо, будет времени - распатрашу мышку, и не одну :twisted: Andrew313 » 12 июл 2006, 00:09 Этот твой трехногий "фототранзистор" из мышки - на самом деле два ИК фотодиода. Если правильно помню, то соединены аноды (центральный вывод). falanger » 09 июн 2007, 23:19 Как раз по теме меня интересующей тема. Re: Датчики от мышки riv94 » 16 окт 2010, 16:07 Скажите пожалуйста) А из какой мышки можно вынуть фототранзисторы? Есть ли они в старых шариковых мышках? Re: Датчики от мышки Radist » 20 окт 2010, 21:16 Есть именно в них. И вообще если в мышке есть колесико с прорезями - значит рядом прячутся нужные вам объекты. В новых мышах они около колеса прокрутки бывают. Колесо прокрутки, кстати, тоже не выбрасывайте - это же готовое колесо для мелкого робота. Вал моторчика к нему прижмете - и вперед! Без никаких редукторов поедет - проверено. Есть и подводные камни - степень прижима тружно подобрать и сделать ее постоянной. Но терпение и труд все перетрут. Re: Датчики от мышки riv94 » 21 окт 2010, 16:10 спасибо Re: Датчики от мышки E1ik`Tr0nik » 06 апр 2011, 20:21 а даташит найти к этим транзисторам возможно? а то у меня тоже лапок три но написано на самое плате Q - в смысле транзистор Re: Датчики от мышки Radist » 06 апр 2011, 22:01 Насчет даташита сильно сомневаюсь. Я вам и так скажу: это не фототранзисторы, а два фотодиода с общим катодом (катод посередине). На него плюс надо подавать. А почему их два: прорези колесика так сделаны, то один фотодиод закрыт, а второй открыт; по сдвигу фаз от двух фотодиодов можно однозначно определить направление вращения колесика. Re: Датчики от мышки E1ik`Tr0nik » 06 апр 2011, 22:43 этто интересно... а хватит его мощности в случае если повесить светодиод из той же мыши, и чтобы на расстоянии хотя бы 5см фотодиод уловил отраженный сигнал? потом это само собой усилится компаратором... Re: Датчики от мышки Radist » 07 апр 2011, 06:52 Попробуйте, потом нам расскажете. Я лично датчики из них не делал. Датчики линии народ из них делал, но там не надо 5 см. Re: Датчики от мышки Strijar » 07 апр 2011, 09:12 Radist писал(а):Попробуйте, потом нам расскажете
Схемотехника ИК-датчики линии Мобильные роботы самого различного назначения зачастую требуют наличия датчиков, определяющих наличие контрастной линии на поверхности, по которой перемещается робот (датчик линии, ДЛ). В таких датчиках нуждаются, к примеру, сумоботы, СПЛ-боты. Существует много конструкций таких датчиков, однако в настоящее время все они используют один-единственный метод:
При этом в ДЛ могут использоваться следующие источники света:
Второй вариант требует несколько больше деталей (требуется источник света), зато дает более высокую стабильность работы ДЛ. Теперь изменение внешней освещенности или появление теней значительно меньше влияют на результат измерения отраженного света, то есть не приведут к нарушению работы ДЛ. По способу освещения источники света бывают:
Постоянно включенные
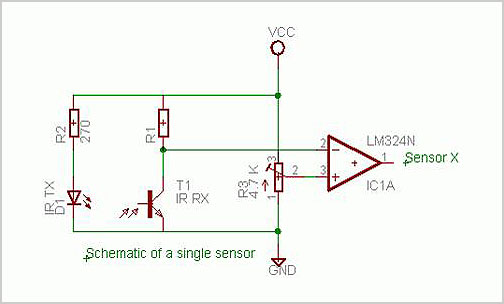
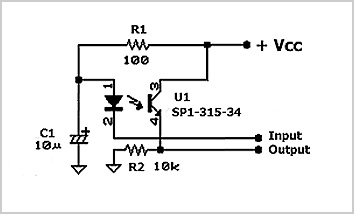
Особенность схемы в наличии подстройки чувствительности датчика. Можно обойтись и без микросхемы дифференциального усилителя, ограничившись одним транзистором (на рисунке ниже - два датчика).
За простоту схемы приходится платить отсутствием регулятора чувствительности датчика. Постоянно включенный источник света имеет серьезный недостаток: большая чувствительность к внешней засветке. В случае проникновения на освещаемый участок поверхности паразитной засветки, например, от солнечного блика, ДЛ неизбежно даст сбой, так как не сможет отражение от такой засветки отличить от отраженного сигнала своего источника света. При использовании этого типа освещения для повышения надежности работы можно применить источник света редко встречающейся длины волны, например, ультрафиолет или инфракрасный свет. Этот способ повысит надежность работы ДЛ, но все равно при засветке прямым солнечным светом, имеющим широкий спектр излучения, вероятность сбоя от засветки сохраняется очень высокой. В случае умышленной засветки со стороны "вероятного противника" работа ДЛ будет практически парализованной. Импульсное освещение
Данная схема отличается простотой реализации, но отсутствием подстройки. Плюсом подобного решения является высокая степень защиты от посторонней засветки. Минусом можно считать повышенную потребность в вычислительных ресурсах, определяемых реализацией описанного выше алгоритма и обслуживающего несколько датчиков поочередно. Так же в случае применения "вероятным противником" умышленной засветки ДЛ может давать сбои. Модулированное освещение Ввиду сложности схемы данное решение нечасто применяется в датчиках линии и больше характерно для датчиков препятствия или датчиках объекта. Плюсом такого решения является очень высокая помехозащищенность. Комбинированное (Кодовое) освещение Например, можно излучать кодовые последовательности импульсов, каждый из которых модулирован высокочастотным сигналом. В этом случае на первом этапе проверки выделяется сигнал, модулированный "своей" частотой, на втором этапе определяется наличие в отраженном сигнале "своей" кодовой последовательности. Таким образом, двухступенчатый контроль дает очень высокую степень защиты от внешней засветки и умышленных помех со стороны вероятного противника. Такой способ будет самым надежным, но и самым дорогостоящим в реализации и самым прожорливым в плане потребления вычислительных ресурсов МК.
Все движения нашего сердца должны быть подчинены разуму,не так ли? Как сделать вибрационную мышь из обычной оптической мыши
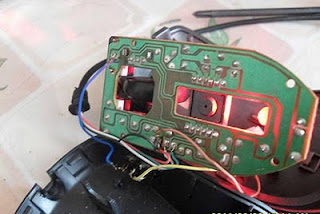
Сейчас многие фирмы выпускают мыши с функцией отдачи. То есть, когда вы стреляете в игре из какого либо оружия, мышь начинает вибрировать, имитируя отдачу. Но стоят такие мыши дорого, и не каждый сможет позволить такую дорогостоящую покупку. Можно попробовать сделать такую вибрационную мышь из обычной оптической мыши.
Эксцентричный моторчик можно достать из старого или не нужного телефона. Осторожно разобрав телефон следует найти и достать моторчик. Обычно он выглядит как маленький цилиндр с металлической деталькой на своем валу, также он может выглядеть в форме таблетки с проводками.
Итак, приступаем. Сначала слишком короткие провода двигателя удлиняем – припаиваем проводки необходимой длины, это около восьми сантиметров. Затем, проверяем полярность и правильность подключению Для этого один проводок подводим (но пока не припаиваем) к плюсу или минусу на кабеле входящем в мышь. А другой к одному из трех контактов выключателя левой кнопки. Меня положение проводка на контактах и меняя полярность, добиваемся того, чтобы при нажатии кнопки, моторчик начинал вибрировать. После этого осторожно, чтобы не задеть соседние контакты и провода, припаиваем все на свои места. Моторчик следует приклеить к корпусу супер клеем. Клей момент использовать нельзя, так как после засыхания он превращается в резино-подобную массу, и моторчик не будет передавать вибрацию на корпус.
Можно пойти еще дальше, приделать выключатель вибрации, так как она может иногда мешать и надоедать. Для этого берем трех контактный выключатель и подключаем его к электро-цепи. Далее, в корпусе мышки надо прорезать отверстие по размерам выключателя, и вставить его туда, не забыв смазать супер клеем.

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|
 ) есть подробное описание лайн трайсера, и чел. пришёл к выводу 6 - номинальное число, а плАту он заготовил под 8!
) есть подробное описание лайн трайсера, и чел. пришёл к выводу 6 - номинальное число, а плАту он заготовил под 8!
 - forum3/topic3209.html
- forum3/topic3209.html