
|
|
Механические характеристики производственных механизмов и электрических двигателей12 Предисловие Книга написана в соответствии с требованиями к обязательному минимуму содержания основной образовательной программы подготовки дипломированного специалиста по направлению 110300 – Агроинженерия. Учебное пособие предназначено для студентов высших агроинженерных учебных заведений, обучающихся по неэлектротехническим специальностям: 110301 – «Механизация сельского хозяйства», 110303 – «Механизация переработки сельскохозяйственной продукции», 110304 – «Технология обслуживания и ремонта машин в агропромышленном комплексе». Авторы на основе многолетнего опыта преподавания курса в Челябинском государственном агроинженерном университете (ЧГАУ) изложили материал в той последовательности, в какой он дается студентам. Учебное пособие состоит из двух частей, каждая из которых издается отдельной книгой. Авторы благодарят своих коллег – доцентов Грачева Г.М., Антони В.И., Салихова С.С. и Селунского В.В. за большую помощь, оказанную при работе над книгой, выражают глубокую благодарность рецензентам: докт. техн. наук, проф. Усынину Ю.С.-(ЮУрГУ), и канд. техн. наук, проф. Попкову А.А.-(ЧГАУ) за полезные советы и предложения. Авторы искренне признательны заведующему лабораториями кафедры ПЭЭСХ Астафьеву Д.В. и старшему лаборанту Герасимовой О.В. за компьютерное оформление рукописи. Отзывы по книге просим направлять по адресу: 454080, г.Челябинск, пр. им. В.И. Ленина, 75, ЧГАУ. Авторы
ВВЕДЕНИЕ
Электрификация и автоматизация производственных процессов в АПК (агропромышленный комплекс) проводились и проводятся одновременно с электрификацией всего народного хозяйства России. Началом электрификации принято считать 1920 год, когда был разработан план по электрификации России и образована Государственная комиссия (ГОЭЛРО[1]) во главе с академиком Г.М. Кржижановским. С широким применением электрической энергии в АПК создавалась и развивалась соответствующая наука. Основоположником научной дисциплины «Применение электрической энергии в сельском хозяйстве» является академик ВАСХНИЛ М.Г. Евреинов. В 1933 году он выпустил двухтомное учебное пособие по названной дисциплине, которое несколько десятилетий было настольной книгой и справочным пособием для специалистов сельской электрификации. По нему в учебных заведениях России подготовлено не одно поколение квалифицированных инженеров. Одним из основных потребителей электроэнергии в АПК является электропривод различных машин, механизмов и поточных линий. Электрический привод является основой, на которой базируются комплексная электромеханизация и автоматизация технологических процессов в АПК. Крупным потребителем электроэнергии на селе являются тепловые процессы. Трудно переоценить значение их для сельскохозяйственного производства. В одних случаях теплота используется для создания благоприятных температурных условий для животных и растений, в процессах переработки и хранения сельскохозяйственной продукции, в других – для подавления вредных микроорганизмов, вызывающих порчу продукции и снижение плодородия. Обе эти задачи решаются с использованием как высоких (нагрев), так и низких (охлаждение) температур. Электрическую энергию на предприятиях АПК применяют для нагрева воздуха (в системах микроклимата сельскохозяйственных помещений, при сушке сельскохозяйственной продукции); нагрева воды и генерации пара (кормоприготовление, поение животных, санитарно-гигиеническая обработка животных и оборудования, полив растений); местного обогрева (при выращивании молодняка); технологических нужд в перерабатывающей промышленности и др. Прогрессивным и быстроразвивающимся направлением является электротехнология. Здесь электрическая энергия используется для непосредственного воздействия на сельскохозяйственную продукцию и биологические объекты, вызывая в них направленные изменения. Характерная особенность электротехнологических установок – очень низкое потребление электроэнергии, высокая производительность технологических процессов. В АПК предметом обработки могут быть почва, продукты растениеводства, животноводства, жидкие и пастообразные среды и т.д. Широкое применение в АПК получила лучистая энергия, которая используется в виде освещения, облучения, досвечивания, а также для воздействия определенным образом на живые ткани растительных и животных объектов и продукцию АПК. Для этих целей промышленностью выпускаются многочисленные источники видимого, инфракрасного и ультрафиолетового излучения, специальная арматура и аппаратура управления к ним. Невозможно перечислить и охарактеризовать многочисленные виды и способы использования электрической энергии в АПК. Известно, что из 300 возможных видов применения электроэнергии в настоящее время освоено около 100, из которых в производстве АПК используется примерно третья часть. Перспектива применения электрической энергии в АПК открывает широкие возможности для перехода к комплексной системе электромеханизации и автоматизации производственных процессов с поточной технологией. Комплексная система электрификации АПК позволит резко поднять производительность труда, увеличить количество и повысить качество выпускаемой продукции. Решение поставленных задач возможно при наличии квалифицированных специалистов. Задача настоящего учебного пособия – вооружить будущих инженеров знаниями, которые будут необходимы им для грамотного и рационального применения электрической энергии в АПК. В первой части «Основы электропривода» рассмотрены общие вопросы: электропривода (характеристики, режимы работы, нагрев и выбор электродвигателей), электрических схем, аппаратуры управления и защиты электрооборудования. Во второй части «Автоматизированный электропривод и электротехнологии в АПК» изложены вопросы использования электропривода и применения электрооборудования в животноводстве и растениеводстве, на предприятиях технического сервиса, в цехах хранения и первичной переработки сельскохозяйственной продукции. В отдельную главу выделены проблемы энергосбережения на предприятиях АПК. В первой части пособия главы написаны: Введение –Возмилов А.Г. и Ермолиным М.Я., глава 1…4 – Возмиловым А.Г. и Ермолиным М.Я., глава 5 – Ермолиным М.Я., и Сажиным В.Н., глава 6 – Кирпичниковой И.М.
Глава 1. Общие сведения. Механика электропривода
Основные понятия, определения и классификация электроприводов
Современный производственный агрегат состоит из большого числа разнообразных узлов, отдельных исполнительных органов и аппаратов, выполняющих различные функции и обеспечивающих определенный производственный процесс. Для квалифицированного проектирования электропривода при создании рабочих машин, отвечающего требованиям технологий и обслуживания в эксплуатации, необходимо хорошо знать назначение и устройство отдельных элементов, составляющих данную машину. Основным элементом любого машинного устройства является двигатель с системой управления и передаточным механизмом, которые сообщают движение рабочей машине. В связи с этим их объединяют общим названием “привод”. В настоящее время для приведения в движение рабочих машин чаще используют электрический двигатель, поэтому этот тип привода называется электрический, или просто электропривод. Электропривод предназначен для преобразования электрической энергии в механическую или механической энергии в электрическую (в зависимости от режима работы двигателя) и передачи её рабочей машине с помощью передаточного устройства и электрического управления данным приводом. Электропривод – это электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением (ГОСТ 16593-79). Структурная схема электропривода приведена на рис. 1.1. Электродвигательное устройство (ЭД) - двигатель постоянного или переменного тока, вращательного или поступательного движения - предназначено для преобразования электрической энергии в механическую или механической энергии в электрическую. Преобразователь (П) предназначен для питания двигателя и создания управляющего воздействия на него. Он преобразует род тока или напряжение, или частоту тока либо изменяет иные показатели электрической энергии, подводимой к двигателю. В качестве преобразователя используют различного типа трансформаторы, выпрямители, преобразователи частоты тока, автотрансформаторы, тиристорные регуляторы напряжения и др. Управляющее устройство (У) управляет работой электродвигателя (включение и отключение, реверсирование и регулирование скорости и т.п.). Передаточное устройство (ПУ) предназначено для передачи механической энергии от электродвигательного устройства к исполнительным органам рабочей машины (РМ), изменения вида и скорости движения, а также усилия (момента вращения).
В зависимости от того, сколько рабочих машин или исполнительных органов приходится на двигатель, электропривод принято подразделять на групповой, индивидуальный и многодвигательный. Групповым электроприводом называется привод, при котором от одного двигателя приводится в движение несколько рабочих машин (РМ) или несколько исполнительных органов (ИО) одной рабочей машины при помощи механической трансмиссии или ременной либо редукторной передачи. Такой групповой привод иногда называется трансмиссионным (рис. 1.2). Передаточные устройства в таком приводе сложны и громоздки, а сам привод, как правило, неэкономичен. Развитие электропривода было связано с установкой на каждую рабочую машину отдельного электродвигателя. По сравнению с трансмиссионным такой привод является более совершенным, но по существу остается групповым, так как в машине имеется несколько исполнительных органов (ИО), приводимых в движение одним двигателем (рис.1.3). Примером группового электропривода может служить привод ряда токарно-винторезных станков.
При индивидуальном электроприводе каждый исполнительный орган рабочей машины приводится в движение самостоятельным электродвигателем (рис.1.4). При индивидуальном электроприводе за счет того, что каждый орган рабочей машины приводится в движение отдельным электродвигателем, исполнительные органы рабочей машины оказываются уже не связанными друг с другом, поэтому значительно упрощаются механические передачи. В некоторых случаях в результате полного исключения механических передач удается существенно повысить точность работы машины. Индивидуальный электропривод позволяет обеспечить оптимальный режим работы машин, при котором достигается максимальная производительность. Примером такого привода может служить электропривод продольно-фрезерного станка (рис.1.5), вакуум-насоса, доильного агрегата, сепаратора, вентилятора и т.п. В индивидуальном электроприводе двигатель может органически входить в конструкцию рабочей машины, так что отдельные части электродвигателя при этом одновременно являются частями рабочей машины, например, в электрифицированном ручном инструменте (электродрель, электрорубанок, электропила и т.п.). Индивидуальный электропривод, обладая рядом преимуществ перед другими приводами, получил широкое распространение в различных отраслях АПК.
Взаимосвязанный электропривод содержит два или несколько электрически или механически связанных между собой электроприводов, при работе которых поддерживается заданное соотношение или равенство скоростей или нагрузок или положение исполнительных органов рабочих машин. Одной из разновидностей взаимосвязанного электропривода является многодвигательный электропривод. Многодвигательным электроприводомназывается электропривод, обеспечивающий передачу движения от нескольких ЭД на один общий вал(рис.1.6). Примером такого электропривода служит привод цепного конвейера (рис.1.7). Цепь, приводимая в движение двумя или несколькими двигателями, расположенными вдоль конвейера, является рабочим органом. В данном случае двигатели ЭД1 и ЭД2 имеют вынужденно одинаковую скорость. Взаимосвязанный электропривод широко применяется в различных современных машинах и агрегатах, например, в копировальных, металлорежущих станках и станках с программным управлением, в поточных технологических линиях.
Рис. 1.7. Схема взаимосвязанного электропривода конвейера
Многообразие производственных процессов обуславливает различные виды и характеры движения исполнительных органов машины, следовательно, и электроприводов. По виду движения электроприводы бывают вращательного или поступательного, однонаправленного или реверсивного движения. По характеру управления электропривод может быть нерегулируемым, регулируемым, программно управляемым, следящим и др.
Механические характеристики производственных механизмов и электрических двигателей
При проектировании и эксплуатации электроприводов важное значение имеет правильное сочетание механических характеристик электропривода и рабочей машины. Рациональное сочетание механических характеристик электропривода и рабочей машины обеспечивает высокие технико-экономические показатели работы производственных механизмов. Зависимость между моментом сопротивлений и угловой скоростью, т.е. Мс=f(w)называют механической характеристикой производственного механизма. Различные рабочие машины обладают различными механическими характеристиками. Теоретически эти характеристики в общем виде можно описать следующей эмпирической формулой: где Мс - момент сопротивления рабочей машины, соответствующий скорости w; М0- момент сопротивления трения в движущихся частях механизма; Мс.н - момент сопротивления рабочей машины при номинальной угловой скорости ωн; w/wн – относительная скорость, где ω, ωн – текущая и номинальная скорости; χ- показатель степени, характеризующий изменение момента сопротивления при изменении скорости. Все механические характеристики производственных механизмов можно разделить на следующие основные группы (рис.1.8): 1) механическая характеристика, не зависящая от скорости(прямая 1, рис.1.8). При этом χ=0, Мс не зависит от скорости и
является постоянной величиной. Такую характеристику имеют подъемные механизмы (лебедки, краны, тельферы, лифты, кран-балки и др.); кормораздаточные транспортеры (телескопические, ленточные и др.); навозоуборочные транспортеры (кругового движения, штанговые, каретно-скреперные и др.) и другие рабочие машины; 2) линейно - возрастающая механическая характеристика (прямая 2, рис.1.8). При этом χ=1, Мс линейно зависит от скорости w, увеличиваясь с ее возрастанием. Такая характеристика свойственна генераторам постоянного тока с независимым возбуждением, работающим как рабочая машина и отдающим энергию на постоянное внешнее сопротивление; глиномялкам и льномялкам под нагрузкой; корнеклубнемойкам и прессам типа ПСМ-5А на холостом ходу и другие рабочие машины; 3) нелинейно - возрастающая (параболическая) механическая характеристика(кривая 3, рис.1.8). Показатель степени χ = 2. Механизмы, обладающие такой характеристикой, иногда называют механизмами с вентиляторным моментом, т.к. у вентиляторов момент сопротивления зависит от квадрата скорости. Кроме вентиляторов, такую характеристику имеют центробежные насосы, сепараторы, молотильные барабаны и др.; 4) нелинейно - падающая механическая характеристика (кривая 4, рис.1.8). В этом случае показатель степени χ = –1, Мс изменяется обратно пропорционально скорости. Данной характеристикой обладают некоторые токарные, расточные, фрезерные и другие металлообрабатывающие станки, зерновые ковшовые нории под нагрузкой при постоянной подаче, шнековые транспортеры и другие рабочие машины. Для выбора рационального электропривода необходимо знать механическую характеристику не только рабочей машины, но и электродвигателя. От правильного сочетания данных характеристик зависят экономичность и надежность работы электропривода. Механической характеристикой электродвигателяназывается зависимость между его вращающим моментом и угловой скоростью, т.е. МД=f(w). Почти у всех электродвигателей скорость является убывающей функцией момента двигателя. Однако степень изменения скорости с изменением момента у разных двигателей различна и характеризуется так называемой жесткостью механических характеристик. Жесткость механической характеристики электродвигателя определяется как отношение разности моментов, развиваемых электродвигателем, к соответствующей разности угловых скоростей:
Например, у механической характеристики 3 на рис.1.9 жесткость определяется как Все механические характеристики электродвигателей можно разделить на следующие основные типы (рис.1.9): 1) абсолютно жесткая механическая характеристика (b=¥) - это такая характеристика, при которой скорость с изменением момента остается неизменной. Данной характеристикой обладают синхронные двигатели (прямая 1, рис.1.9); 2) механическая характеристика с коэффициентом жесткости b = 40...10 - это характеристика, при которой скорость с изменением момента хоть и уменьшается, но в незначительной степени. Такой характеристикой обладают двигатели постоянного тока независимого возбуждения (прямая 2, рис.1.9) и асинхронные двигатели в рабочей части (АВ на кривой 3, рис.1.9); 3) мягкая механическая характеристика (b£10) - это характеристика, при которой с изменением момента скорость изменяется существенно. Такую характеристику имеют двигатели постоянного тока последовательного возбуждения, особенно в зоне больших угловых скоростей (кривая 4, рис.1.9).

12 Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|
 , (1.1)
, (1.1)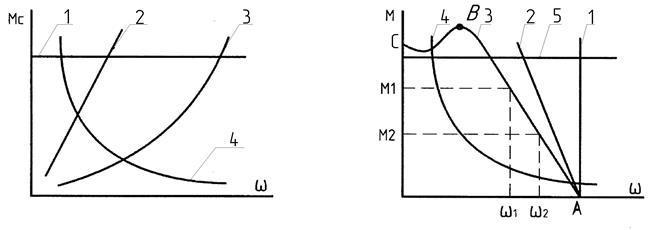
 . (1.2)
. (1.2) .
.