
|
|
Центр масс и закон его движения.Центром масс (инерции) механической системы называется точка
где Если радиус- векторы проведены из центра масс Таким образом, центр масс – это геометрическая точка, для которой сумма произведений масс всех материальных точек, образующих механическую систему, на их радиус-векторы, проведенные из этой точки, равна нулю. В случае непрерывного распределения массы в системе (в случае протяженного тела) радиус-вектор центра масс системы:
где r – радиус-вектор малого элемента системы, масса которого равна dm, интегрирование проводится по всем элементам системы, т.е. по всей массе m. Продифференцировав формулу (2.12) по времени, получаем выражение для скорости центра масс:
Скорость центра масс механической системы равна отношению импульса этой системы к её массе. Тогда импульс системы равен произведению ее массы на скорость центра масс:
Подставив это выражение в основное уравнение динамики поступательного движения твердого тела, имеем:
- центр масс механической системы движется как материальная точка, масса которой равна массе всей системы и на которую действует сила, равная главному вектору приложенных к системе внешних сил. Уравнение (2.13) показывает, что для изменения скорости центра масс системы необходимо, чтобы на систему действовала внешняя сила. Внутренние силы взаимодействия частей системы могут вызвать изменения скоростей этих частей, но не могут повлиять на суммарный импульс системы и скорость ее центра масс.
Если механическая система замкнутая, то Таким образом, центр масс замкнутой системы либо покоится, либо движется с постоянной скоростью относительно инерциальной системы отсчета. Это означает, что с центром масс можно связать систему отсчета, и эта система будет инерциальной.
Преобразования Галилея. Принцип относительности Галилея.
Обозначим системы: 1-ю систему, буквой Выберем координатные оси Найдем связь между координатами
В классической механике считается, что время в обеих системах течет одинаковым образом, Тогда получаем совокупность четырех уравнений, называемых преобразованиями Галилея:
Найдем связь между скоростями точки
В векторной форме:
Формулы (2.15) и (2.16) выражают правило сложения скоростей в классической механике. При этом следует помнить, - выражения (2.15) справедливы лишь в случае выбора осей, показанных на рис.2.5. - выражение (2.16) справедливо при любом выборе осей.
Продифференцировав (2.16) по времени, получаем:
- ускорение тела во всех инерциальных системах отсчета одинаково. Это означает, что и силы, действующие на тело в инерциальных системах отсчета одинаковы. Следовательно, уравнения динамики не изменяются при переходе от одной инерциальной системы отсчета к другой, т.е. инвариантны к преобразованиям Галилея. С механической точки зрения все инерциальные системы отсчета совершенно эквивалентны, ни одной из них нельзя отдать предпочтение перед другими. Это означает, что никакими механическими опытами, проведенными в пределах данной системы отсчета, нельзя установить, находится ли она в состоянии покоя или движется прямолинейно и равномерно. Эти положения носят название принципа относительности Галилея. Силы. В современной физике различают четыре вида взаимодействий: 1. гравитационное (вызванное всемирным тяготением), 2. электромагнитное (осуществляемое через электрические и магнитные поля), 3. сильное или ядерное (обеспечивающее связь частиц в атомном ядре) 4. слабое (проявляющееся при распаде элементарных частиц). В классической механике имеют дело с гравитационными и электромагнитными силами, а также с упругими и силами трения. Два последних вида сил определяются характером взаимодействия между молекулами вещества и имеют электромагнитное происхождение. Гравитационные и электромагнитные силы являются фундаментальными, их нельзя свести к другим, более простым силам. Упругие силы и силы трения не являются фундаментальными.
Упругие силы. Упругая сила –сила пропорциональная смещению материальной точки из положения равновесия и направленная к положению равновесия. Всякое реальное тело под действием приложенных к нему сил деформируется, т.е.изменяет свои размеры и форму. Если после прекращения действия сил тело принимает первоначальные размеры и форму, деформация называется упругой. Примеры: а) Упругие деформации наблюдаются в том случае, если сила, обусловившая деформацию, не превосходит некоторый предел, называемый пределом упругости. б) Если после прекращения действия сил форма и размеры тела не восстанавливаются, говорят о неупругой деформации.
а) Под действием этих сил пружина растянется на некоторую величину В состоянии равновесия внешние силы При небольших деформациях удлинение пружины
- это закон Гука. Здесь Упругие натяжения возникают во всей пружине. Любая часть пружины действует на другую часть с силой, определяемой формулой (2.18). Поэтому, если разрезать пружину пополам, та же по величине упругая сила будет возникать в каждой из половин при в два раза меньшем удлинении. Таким образом, при заданных: материале пружины и размерах витка, величина упругой силы определяется не абсолютным удлинением пружины
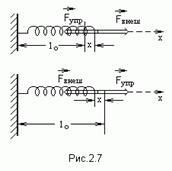
Обобщим формулу (2.18) следующим образом. Закрепим один конец пружины неподвижно (рис.2.7), а удлинение пружины будем рассматривать как координату Под
Из рис.2.7 видно, что проекция упругой силы на ось
Если к концам стержня приложить направленные вдоль его оси силы то длина стержня Деформация стержня характеризуется относительным изменением длины: Экспериментально доказано, что для стержней из данного материала относительное удлинение при упругой деформации пропорционально силе, приходящейся на единицу площади поперечного сечения стержня:
Коэффициент пропорциональности a называется коэффициентом упругой податливости. Величина, равная отношению силы к площади поверхности, на которую действует сила, называется напряжением. В результате взаимодействия частей тела друг с другом напряжение передается во все точки тела и весь объем стержня оказывается в напряженном состоянии. Если сила направлена: - по нормали к поверхности, напряжение называется нормальным и обозначается s. - по касательной к поверхности, возникает тангенциальноенапряжение В выражении (2.20) Величина, обратная упругой податливости, называется модулем Юнга С учетом сказанного, Модуль Юнга равен такому нормальному напряжению, при котором относительное удлинение было бы равно единице. Решив записанные уравнения относительно F получаем: закон Гука для стержня.
Силы трения. Силы трения 1) появляются при перемещении соприкасающихся тел или их частей друг относительно друга. 2) направлены по касательной к трущимся поверхностям так, чтобы противодействовать относительному смещению этих поверхностей. Трение, возникающее при относительном перемещении двух соприкасающихся тел, называетсявнешним Трение между частями одного и того же сплошного тела называетсявнутренним.
Трение между поверхностями двух тел при отсутствии какой-либо прослойки, например, смазки между ними, называется сухим. Различают трение скольжения и трение качения. СУХОЕ ТРЕНИЕ. В случае сухого трения сила трения возникает не только при скольжении одной поверхности по другой, но и при попытках вызвать такое скольжение. В этом случае она называется силой трения покоя. Рассмотрим два соприкасающихся тела 1 и 2, из которых последнее закреплено неподвижно (рис.2.9): Тело 1 прижимается к телу 2 с силой Попытаемся переместить тело 1, подействовав на него внешней силой - для каждой конкретной пары тел и каждого значения силы нормального давления имеется определенное минимальное значение - при значениях внешней силы, заключенных в пределах По третьему закону Ньютона на тело 2 также действует сила трения покоя Если внешняя сила
Из эксперимента известно, что максимальная сила трения покоя, а также сила трения скольжения · не зависят от площади соприкосновения трущихся тел · пропорциональны величине силы нормального давления, прижимающей трущиеся поверхности друг к другу: где m – коэффициент трения.
ВЯЗКОЕ ТРЕНИЕ. Сила вязкого трения является функцией скорости и обращается в ноль одновременно со скоростью. Помимо собственно сил трения, при движении тел в жидкой или газообразной среде возникают силы сопротивления среды, которые могут значительно превосходить силы трения. Суммарная сила трения и сопротивления среды · при небольших скоростях растет линейно со скоростью · при больших скоростях она пропорциональна квадрату скорости где 
Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|
 , радиус-вектор которой равен отношению суммы произведений масс всех материальных точек системы на их радиус-векторы к массе всей системы:
, радиус-вектор которой равен отношению суммы произведений масс всех материальных точек системы на их радиус-векторы к массе всей системы: (2.12)
(2.12) и
и  - масса и радиус-вектор
- масса и радиус-вектор  -той материальной точки,
-той материальной точки,  -общее число этих точек,
-общее число этих точек,  – суммарная масса системы.
– суммарная масса системы. .
. ,
,
 .
. (2.13)
(2.13) и скорость центра масс не изменяется с течением времени.
и скорость центра масс не изменяется с течением времени. Рассмотрим две системы отсчета, движущиеся друг относительно друга с постоянной скоростью
Рассмотрим две системы отсчета, движущиеся друг относительно друга с постоянной скоростью  . (рис.2.5)
. (рис.2.5) и будем условно считать неподвижной. Тогда втораясистема
и будем условно считать неподвижной. Тогда втораясистема  будет двигаться прямолинейно и равномерно.
будет двигаться прямолинейно и равномерно. системы
системы  системы
системы  и
и  совпадали, а оси
совпадали, а оси  и
и  , а также
, а также  и
и  были параллельны друг другу.
были параллельны друг другу. в системе
в системе  . Если начать отсчет времени с того момента, когда начала координат обеих систем совпадали, то, как следует из рис.2. 5,
. Если начать отсчет времени с того момента, когда начала координат обеих систем совпадали, то, как следует из рис.2. 5, ,
,  .
. .
. . (2.15)
. (2.15) . (2.16)
. (2.16) (2.17)
(2.17) Рассмотрим пружину, (рис.2.6), имеющую в недеформированном состоянии длину
Рассмотрим пружину, (рис.2.6), имеющую в недеформированном состоянии длину  , и приложим к ее концам равные по величине, противоположно направленные силы
, и приложим к ее концам равные по величине, противоположно направленные силы  и
и 
 , после чего наступит равновесие.
, после чего наступит равновесие. (2.18)
(2.18) - коэффициент жесткости пружины.
- коэффициент жесткости пружины.
 б) При сжатии пружины также возникают упругие натяжения, но другого знака.
б) При сжатии пружины также возникают упругие натяжения, но другого знака. будем понимать проекцию на ось
будем понимать проекцию на ось  . Тогда можно записать:
. Тогда можно записать: . (2.19)
. (2.19)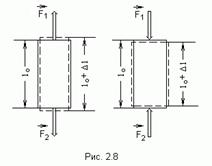 2) Однородные стержни ведутсебя при растяжении или одностороннем сжатии подобно пружине. (рис.2.8).
2) Однородные стержни ведутсебя при растяжении или одностороннем сжатии подобно пружине. (рис.2.8). , действие которых равномерно распределено по всему сечению,
, действие которых равномерно распределено по всему сечению,
 . (2.20)
. (2.20) .
. , поэтому
, поэтому  .
.
 .
.
 Трение между твердым телом и жидкой или газообразной средой, а также между слоями такой среды называется вязким.
Трение между твердым телом и жидкой или газообразной средой, а также между слоями такой среды называется вязким. , направленной по нормали к поверхности соприкосновения тел. Она называется силой нормального давленияи может быть обусловлена, например, весом тела.
, направленной по нормали к поверхности соприкосновения тел. Она называется силой нормального давленияи может быть обусловлена, например, весом тела. . Из демонстрации 3 видно, что
. Из демонстрации 3 видно, что силы
силы  , тело остается в покое, сила
, тело остается в покое, сила  трения покоя. Величина
трения покоя. Величина  , равная по величине
, равная по величине  и имеющая противоположное направление.
и имеющая противоположное направление. , то тело начинает скользить.
, то тело начинает скользить. Его ускорение определяется результирующей двух сил: внешней
Его ускорение определяется результирующей двух сил: внешней  ,
, ,
, ,
, - орт скорости
- орт скорости