
|
|
Эквивалентное преобразование структурных схем.СОДЕРЖАНИЕ
ВВЕДЕНИЕ………………………………………………………………………………………4 1 ТЕОРЕТИЧЕСКАЯ ЧАСТЬ…………………………………………………………………...5 1.1 Типовые структурные схемы системы управления……………………………………….5 1.2 Эквивалентное преобразование структурных схем……………………………………….6 1.3 Характеристики элементов систем управления…………………………………………...8 1.4 Устойчивость систем управления………………………………………………………….8 1.5 Оценка качества в переходных процессах систем управления………………………….10 1.6 Временные характеристики………………………………………………………………..12 1.7 Частотные характеристики………………………………………………………………...13 2 ИСХОДНЫЕ ДАННЫЕ……………………………………………………………………...15 3 ПОЛУЧЕНИЕ ЭКВИВАЛЕНТНОЙ ПЕРЕДАТОЧНОЙ ФУНКЦИИ…………………….16 4 ПОСТРОЕНИЕ ОБЛАСТИ УСТОЙЧИВОСТИ НА ПЛОСКОСТИ ПАРАМЕТРОВ РЕГУЛЯТОРА…………………………………………………………………………………..19 5 ПОСТРОЕНИЕ ГОДОГРАФА МИХАЙЛОВА ДЛЯ СОЧЕТАНИЯ ПАРАМЕТРОВ РЕГУЛЯТОРА…………………………………………………………………………………..22 5.1 Годограф Михайлова для сочетания параметров регулятора из области устойчивости……………………………………………………………………………………22 5.2 Годограф Михайлова для сочетания параметров регулятора из области неустойчивости…………………………………………………………………………………23 5.3 Годограф Михайлова для сочетания параметров регулятора на границе устойчивости……………………………………………………………………………………25 6 ВЫБОР ПАРАМЕТРОВ РЕГУЛЯТОРА ПО ЗАДАННЫМ ПОКАЗАТЕЛЯМ УСТАНОВИВШЕГОСЯ РЕЖИМА И ПЕРЕХОДНОГО ПРОЦЕССА …………………….27 6.1 Характеристики установившегося режима……………………………………………….27 6.1 Характеристики переходного процесса…………………………………………………...27 7 ПОСТРОЕНИЕ ДЛЯ ВЫБРАННЫХ ПАРАМЕТРОВ РЕГУЛЯТОРА ЧАСТОТНЫХ ХАРАКТЕРИСТИК…………………………………………………………………………….30 7.1 Частотные характеристики разомкнутой системы……………………………………….30 7.2 Частотные характеристики замкнутой системы………………………………………….34 8 ПОСТРОЕНИЕ ДЛЯ ВЫБРАННЫХ ПАРАМЕТРОВ РЕГУЛЯТОРА ВРЕМЕННЫХ ХАРАКТЕРИСТИК ЗАМКНУТОЙ СИСТЕМЫ……………………………………………..38 9 ЗАКЛЮЧЕНИЕ……………………………………………………………………………….41 10 СПИСОК ЛИТЕРАТУРНЫХ ИСТОЧНИКОВ……………………………………………42
ВВЕДЕНИЕ
Цель данного курсового проекта – произвести синтез системы управления по заданным показателям качества. Одной из основных задач теории автоматического регулирования является изучение динамических процессов, происходящих в автоматических системах. Автоматические системы при нормальной эксплуатации должны поддерживать определенный режим работы объекта регулирования при действии на него многих факторов. Такое поведение может быть достигнуто лишь в системах автоматического регулирования, обладающих устойчивостью по отношению к этим воздействиям. Устойчивость системы означает, что малое изменение входного сигнала или какого-нибудь возмущения, начальных условий или параметров не приведут к значительным отклонениям выходного сигнала. Это определение раскрывает физический смысл понятия устойчивости. Подавляющее большинство расчетов, так или иначе связанных с поставленной задачей сегодня производятся с помощью того или иного математического пакета (Matchcad, Matlab итд). В данном курсовом проекте была выбрана программа Matchcad, т.к. она позволяет не только с большим удобством производить математические расчеты (в том числе и обратное преобразование Лапласа), но и обладает высокой степенью интеграции с популярным текстовым редактором Word, что позволяет с минимальными усилиями представить результаты расчетов в наглядной и удобочитаемой форме. ТЕОРЕТИЧЕСКАЯ ЧАСТЬ. Типовые структурные схемы системы управления.
Среди структурных схем можно выделить типовые структуры, для которых получение передаточных функций является простым. 1. Последовательное соединение элементов с передаточными функциями
Выход предыдущей функции подставляется к входу последующей.
Следовательно, эквивалентная передаточная функция Таким образом, при последовательном соединении элементов эквивалентная передаточная функция равна произведению передаточных функций элементов. Для любого количества последовательно соединенных элементов. 2. Параллельное соединение.
3. Соединение с обратной связью — передача сигнала с выхода системы на ее вход.
В обоих случаях есть передаточные функции
Когда знак плюс, то обратная связь называется положительной, когда минус — отрицательной. Чтобы получить эквивалентную передаточную функцию надо исключить промежуточные функции
Отрицательная обратная связь
Положительная обратная связь — со знаком минус. Эквивалентное преобразование структурных схем.
Для получения эквивалентных передаточных функций между входом и выходом необходимо структурную схему привести к последовательности стандартных структурных схем, а именно последовательному, параллельному соединению и соединению элементов с обратной связью. Если в структурной схеме имеются пересекающиеся контуры обратной связи, то невозможно непосредственно использовать стандартные структуры. Для приведения к стандартной схеме такой структуры надо осуществить в ней эквивалентные структурные преобразования, которые осуществляются по определенным правилам.
Правила преобразования структурных схем
1. Перестановка элементов сравнения: После эквивалентного преобразования схемы сигнал должен остаться такой же. Пересекающиеся контуры исчезли, а сигнал остался прежним
2. Перегруппировка элементов сравнения.
3. Перенос точки разветвления через элемент сравнения.
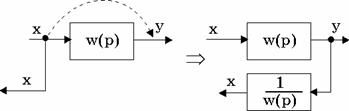
4. Перенос точки разветвления с выхода элемента на его вход.
5. Перенос точки разветвления с входа элемента на выход.
6. Перенос элемента сравнения с выхода динамического элемента на вход.
7. Перенос элемента сравнения со входа на выход.

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|
 ,
,  .
.
 ,
,  .
. .
.
 — алгебраическая сумма передаточных функций элементов.
— алгебраическая сумма передаточных функций элементов.

 и
и  .
.



 .
.
 .
.



 ;
; 
