|
|
Пилотные клапаны в гидравлических схемах.
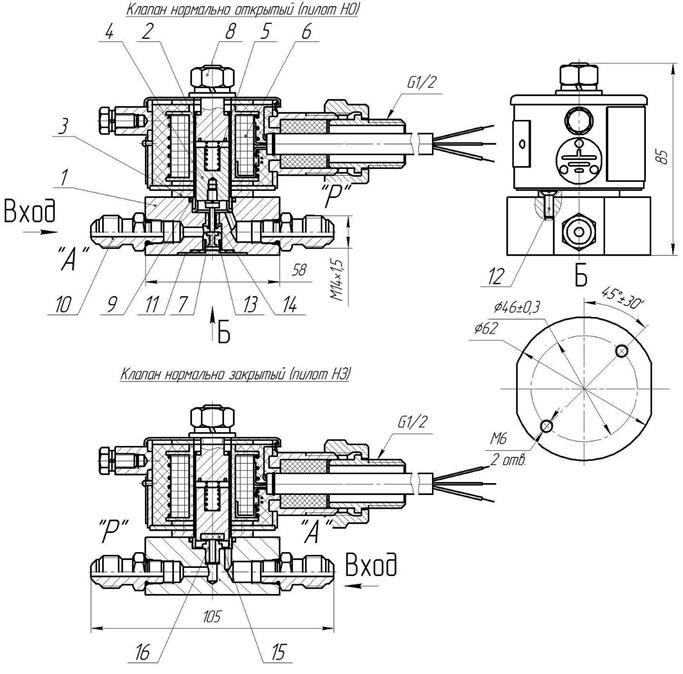
Клапан (см. рис.) включает в себя корпус (1) с входной (14) и выходной (15) полостями, крышку (2) с седлом (7) и каналами (18), на которой с помощью накидной гайки (11) через кольцо уплотнительное (13) установлен привод электромагнитный (10), сердечник (12), а также поршень (3) с запрессованным уплотнителем (4) и каналами (17) и возвратную пружину (8). Крышка (2) соединена с корпусом (1) болтами (9) через прокладку (6), в этом стыке размещена также разделительная втулка (5). На корпусе клапана (1) имеются два резьбовых крепежных отверстия (19).
Давление рабочей среды – 1,0…8,0МПа (10…80кгс/см2) Минимальный перепад давления рабочей среды - 0,02МПа (0,2кгс/см2) Диаметр условного прохода – 15…100мм Температура рабочей среды – -50…180⁰С Рабочая среда: - для клапанов исполнения «нж» - жидкий и газообразный аммиак, хладоны, вода, воздух, жидкие хладоносители, прочие технические газообразные и жидкие продукты; - для клапанов исполнения «с» - жидкий, газообразный аммиак, воздух, другие технические газообразные и жидкие продукты, не вызывающие коррозии материала корпусов и деталей клапанов Материал уплотнения затвора – фторопласт Ф-4 Герметичность затвора – класс А, В по ГОСТ 9544-2005 Присоединение к трубопроводу – цапковое (штуцерно-торцовое), фланцевое Штуцерно-торцовое присоединение по ГОСТ 5890-78. Клапаны со штуцерно-торцовым присоединением поставляются с комплектом ответных присоединительных деталей – ниппель, гайка накидная Фланцевое присоединение исполнение 5 по ГОСТ 12815-80. Клапаны с фланцевым присоединением поставляются с ответными фланцами исполнение 4 по ГОСТ 12815-80 Время срабатывания клапана – до 1 сек Степень защиты от внешних воздействий не ниже IР 65 по ГОСТ 14254-96. Продолжительность включения – ПВ 100%. Величина твёрдых частиц в рабочих средах - не более 63 мкм. Рабочее положение клапана на трубопроводе - электромагнитным приводом вверх, отклонение от вертикали не более 15° Электропитание клапанов: - постоянный ток, 24±10% В - переменный ток, 220±10% В Ввод кабеля – герметичный сальниковый ввод, диаметр кабеля 6…8 мм, по заказу – разъём РМГ2. Взрывозащита 1ЕхdIIВТ4 по ГОСТ 51330.0-99 Клапаны в зависимости от начального положения поршня изготавливаются в исполнении: - нормально закрытые (НЗ) - нормально открытые (НО) Клапаны относятся к классу ремонтируемых, восстанавливаемых изделий. Назначенный ресурс не менее 200 000 включений. Назначенный срок службы не менее 10 лет. Клапаны могут оснащаться сигнализатором положения поршня. Сигнализация по положению поршня «открыт – закрыт» осуществляется с помощью геркона с выводом сигнализации на внешнее устройство предприятия – заказчика. Клапаны могут оснащаться ручным дублером, который предназначен для аварийного закрытия или открытия клапана в случае неисправности электромагнитного привода. Преимущества клапанов пилотного типа - большой диапазон диаметров условного прохода - большой диапазон давлений - малое время срабатывания клапана Ниже в вопросе рассмотрен клапан КО завод г. Ливны ОАО «Промприбор». Клапан предназначен для дистанционного и ступенчатого регулирования, частичного или полного открытия (закрытия) проходного сечения трубопровода с целью обеспечения безопасной технологии налива автомобильных или железнодорожных цистерн неагрессивными нефтепродуктами вязкостью от 0,55 до 300 мм2/с с рабочим давлением до 0,63 МПа.Клапан обеспечивает запрограммированный процесс налива, а также стабилизацию номинального расхода продукта при изменяющихся условиях (высоте взлива продукта в резервуаре и др.), что обеспечивает высокую точность работы измерителей, а также точность выдачи задаваемых доз. Клапан позволяет производить плавную регулировку расхода по заданным параметрам расхода (при наличии измерителя расхода). Клапан незаменим в дозирующих измерительных системах, где требуется плавное и точное регулирование и отсечение выдаваемой дозы. Диаграмма управления пилотными клапанами для поддержания требуемого значения расхода (Q2) при выдаче заданной дозы продукта с помощью клапана КО. (рисунок В.1)
1-корпус; 2-гильза; 3-шайба; 4-якорь; 5-пружина; 6-соленоид; 7-поршень; 8-гайка; 9-кольцо уплотнительное; 10-штуцер; 11-крышка; 12-винт; 13-пружина; 14-жиклер; 15-прокладка; 16-жиклер. Рисунок -Пилотные клапаны управления. Габаритные и присоединительные размеры Устройство клапана КО 1040.00.00.00 показано на рисунке Б.1. Особенностью клапана является то, что основной затвор приводится в действие с помощью давления вспомогательной жидкости. Поэтому работа клапана возможна при перепадах давления рабочей среды, начиная от нуля, а так же отсутствует самопроизвольное опускание затвора при пульсации давления рабочей среды. Давление вспомогательной жидкости создается электронасосом 2. Вспомогательная жидкость с выхода электронасоса 2 через трубку 6 подается на вход пилота НЗ 7. Сброс вспомогательной жидкости обратно в бак 3 осуществляется через пилот НО 8 и трубку 9. В процессе работы электронасоса 2 вспомогательная жидкость нагревается и для ее охлаждения в клапане 1 предусмотрена трубка 12. Вспомогательная жидкость из перепускного клапана 5 электронасоса 2 через трубку 10 поступает в трубку 12 клапана 1, где охлаждается рабочей жидкостью. Затем охлажденная вспомогательная жидкость через трубку 11 возвращается в бак 3. Фильтр 16 необходим для очистки поступающего в бак 3из окружающей среды воздуха. После испытаний для того, чтобы исключить вытекание вспомогательной жидкости при транспортировке фильтр заглушают резиновой прокладкой. В случае, когда дозирующая система не имеет измерителя расхода, на клапан устанавливается датчик положения. В такой комплектации клапан может работать в режиме минимального и максимального расходов. Величина минимального расхода регулируется перемещением датчика 4 в пазе кронштейна 20. Устройство клапана показано на рисунке Б.2. Особенностью клапана является наличие разгруженного поршня 4, что позволяет осуществлять регулировку расхода без гидроудара. Механизм ручной дублирующий (в дальнейшем - механизм РД) предназначен для открытия клапана вручную в случае отключения электропитания. Механизм РД может устанавливаться потребителем при необходимости. Пилотный клапан управления имеет исполнения: нормально открытый (при отсутствии напряжения на соленоиде находится в открытом состоянии) и нормально закрытый (при отсутствии напряжения на соленоиде находится в закрытом состоянии). Пилотный клапан управления нормально открытый (пилот НО) в соответствии с рисунком Г.1 представляет собой соленоидный клапан с общим корпусом 1. В корпусе 1 расположены каналы: входной «А» и выходной «Р». Гильза 2 крепится к корпусу 1 шайбой 3 и винтами 12 и уплотняется кольцом 9. На гильзе 2 установлен соленоид 6 взрывозащищенного исполнения с шайбами и закреплен гайкой 8. При подаче напряжения на соленоид 6, якорь 4 притягивается к упору гильзы и под действием пружины 13 поршень 7 перекрывает проходное сечение канала жиклера 14. Обратный ход поршня 7 происходит за счет снятия напряжения с соленоида и разжатия пружины 5. Пилотный клапан управления нормально закрытый (пилот НЗ) в соответствии с рисунком Г.1 представляет собой соленоидный клапан с общим корпусом 1. В корпусе 1 расположены каналы: входной «А» и выходной «Р». Прокладка 15, установленная в якоре 4, прижимается пружиной 5 и перекрывает канал «А». Гильза 2 крепится к корпусу 1 шайбой 3 и винтами 12 и уплотняется кольцом 9. На гильзе 2 установлен соленоид 6 взрывозащищенного исполнения с шайбами и закреплен гайкой 8. При подаче напряжения на соленоид 6, якорь 4 притягивается к упору гильзы, открывая проходное сечение канала жиклера 16.
- открытие проходного сечения; - удержание необходимого расхода; - закрытие проходного сечения. Достижение режимов осуществляется пилотными клапанами, управление которыми выполняется программно импульсным способом. Длительность импульсов и частота их следования задается управляющей программой. Открытие, режим удержания и закрытие клапана показаны на диаграмме (рисунок В.1). Состояние клапанов пилотных при обеспечении режимов работы следующее: 1- открытие проходного сечения: пилот НО – закрыт, пилот НЗ – открыт; 2- удержание необходимого расхода: оба пилота закрыты; 3- закрытие проходного сечения: пилот НО – открыт, пилот НЗ - закрыт, что соответствует обесточенному состоянию соленоидов пилотов. Величина минимального расхода (Q1), длительность управляющих импульсов пилотов НО и НЗ, доза отпуска нефтепродукта на малом расходе устанавливается и задается с управляющего устройства (центральный блок управления (ЦБУ) + компьютер). Рисунок Б.1 –Клапаны КО 1040.00.00.00. Основные узлы и детали.
1-клапан; 2-электронасос; 3-бак(со вспомогательной жидкостью); 4-датчик индуктивный положения(в зависимости от исполнения клапана); 5-клапан перепускной электронасоса; 6-трубка; 7-пилот НЗ; 8-пилот НО; 9-трубка; 10-трубка; 11-трубка; 12-трубка; 13-кольцо уплотнительное; 14-штуцер; 15-гайка; 16-фильтр; 17-кольцо, 18-штуцер; 19-гайка; 20-кронштейн Рисунок Б.2 -Клапан. Основные узлы и детали.
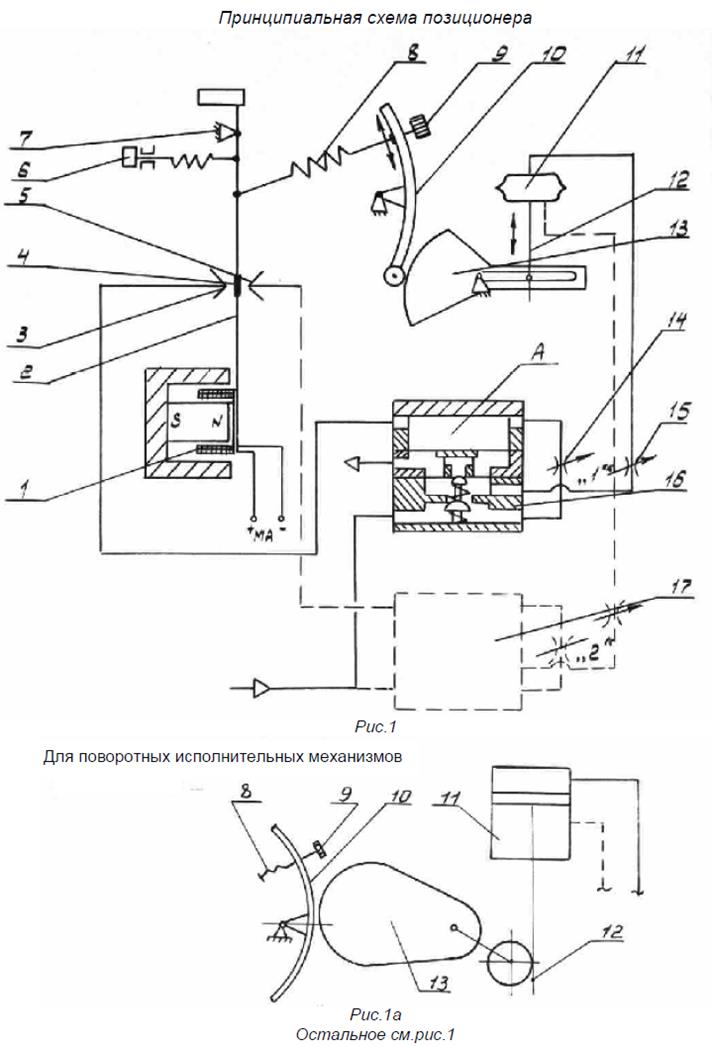
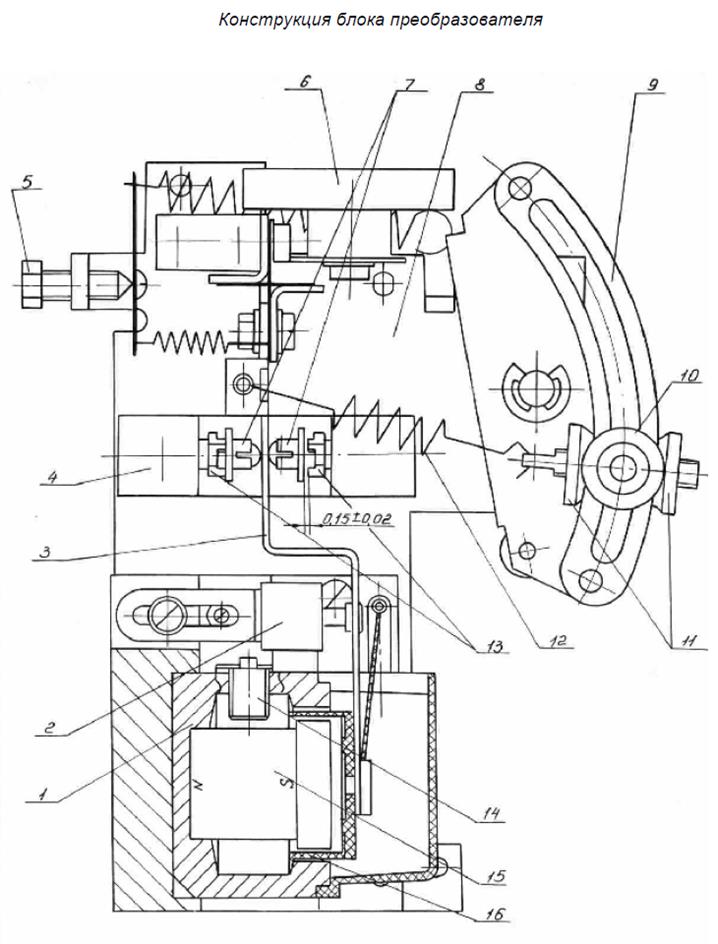
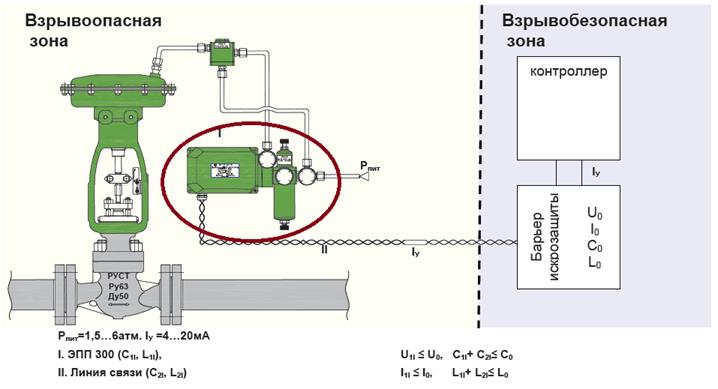
Устройство ЭПП. НАЗНАЧЕНИЕ 1.1 Позиционеры электропневматические ЭПП, (в дальнейшем - позиционеры), позиционеры электропневматические взрывозащищенные ЭПП-Ех, предназначены для уменьшения рассогласования хода и повышения быстродействия поршневых возвратно-поступательных и поворотных исполнительных пневматических механизмов одно и двустороннего действия и мембранных пневматических исполнительных механизмов путем введения жесткой обратной связи по положению выходного звенаисполнительного механизма. Область применения - системы автоматического регулирования или дистанционного управления технологическими процессами в нефтеперерабатывающей, нефтехимической, газовой, криогенной и других отраслях промышленности. Позиционеры электропневматические взрывозащищенные ЭПП-Ех работают с барьером искрозащиты пассивным БИП-1 (в дальнейшем – БИП-1), а также с аналогичными БИП-1 барьерами безопасности с соответствующей областью применения и маркировкой [Ехia]IIC, обеспечивающими искробезопасность входной цепи позиционера и устанавливаемым вне взрывоопасной зоны. Позиционеры ЭПП-Ех имеют уровень взрывозащиты "особовзрывобезопасный" с видом взрывозащиты "искробезопасная электрическая цепь" и маркировку взрывозащиты «0ExiaIIСТ6 Х», соответствуют требованиям ГОСТ 12.2.007.0-75, ГОСТ Р 51330.0-99 (МЭК 60079-0-98), ГОСТ Р51330.10-99(МЭК 60079-11-99), ГОСТ Р 51330.13-99 (МЭК 60079-14-96)и предназначены для установки во взрывоопасных зонах помещений и наружных установок согласно требованиям главы 7.3 ПУЭ-99 и других нормативных документов, определяющих применение электрооборудования во взрывоопасных зонах. Знак «Х», стоящий после маркировки «0ExiaIIСТ6 Х» означает, что при монтаже и эксплуатации позиционеров с барьерами безопасности, аналогичными по назначению БИП-1, необходимо соблюдать «особые условия эксплуатации», которые должны быть отражены в сопроводительной документации, подлежащей обязательной поставке в комплекте с каждым позиционером ЭПП-Ех. «Особые условия эксплуатации»: а) Позиционеры ЭПП-Ех относятся к электротехническим устройствам, предназначенным для установки во взрывоопасной зоне; б) При электропитании позиционеров с маркировкой «0ExiaIIСТ6 Х» по искробезопасной цепи: - эксплуатация позиционеров разрешается только в комплекте с аналогичными БИП-1 барьерами безопасности с соответствующей областью применения и маркировкой «[Ехia]IIC», установленными вне взрывоопасной зоны, имеющими сертификат соответствия (свидетельство о взрывозащищенности) и разрешение на применение Госгортехнадзора России; - электрические параметры позиционеров ЭПП-Ех с учетом параметров соединительного кабеля должны соответствовать электрическим параметрам, указанным на барьере безопасности. Позиционеры не имеют самостоятельного применения, являются комплектующими изделиями для исполнительных механизмов. 1.2. Исполнения позиционеров: 1) no стойкости к механическим воздействиям - виброустойчивое и вибропрочное с группой исполнения N 3 по ГОСТ 12997-84; 2) по защищенности от воздействия окружающей среды вводное устройство и оболочка позиционера имеют степень защиты IР54 по ГОСТ 14254-96; 3) по защищенности от воздействия окружающей среды позиционеры могут быть коррозионностойкого исполнения. Коррозионностойкие позиционеры предназначены для эксплуатации в среде, содержащей до 10 mg/m3 сероводорода и (или) сернистого ангидрида и в аварийных ситуациях (в течение 3-4 часов) - до 100 mg/m3 сероводорода и (или) сернистого ангидрида до 200 mg/m 3; 4) по устойчивости к воздействию температуры и влажности окружающего воздуха позиционеры соответствуют климатическому исполнению У, категории размещения по ГОСТ 15150-69, группы исполнения ДЗ по ГОСТ 12997-84, но для работы при температуре от минус 50 до плюс 60 °С и относительной влажности 95% при 35 °С. УСТРОЙСТВО И РАБОТА ПОЗИЦИОНЕРА 4.1 Принцип действия. 4.1.1 Магнитное поле, возникающее при прохождении тока через катушку 1 (рис.1), взаимодействуя с полем постоянного магнита, развивает усилие, прямо пропорциональное величине входного сигнала. Под действием этого усилия в позиционере одностороннего действия рычаг 2, перемещаясь относительно опоры 7, изменяет зазор между соплом 3 и заслонкой 4, что приводит к изменению давления в управляющей камере А пневматического усилителя 16. На выходе пневматического усилителя формируется усиленный по мощности пневматический сигнал, который по линии "1" поступает в полость исполнительного механизма 11. Выходной элемент 12 исполнительного механизма, совершая ход, перемещает посредством кулачка 13 коромысло 10, что приводит к изменению усилия пружины обратной связи 8 до тех пор, пока не будет достигнуто равновесия на рычаге 2 в системе «сопло-заслонка». В позиционере двустороннего действия рычаг 2 закрывает сопло 3 и открывает сопло 5, в результате чего давление в управляющей камере А пневматического усилителя 16 увеличивается, а в пневматической камере усилителя 17 - уменьшается. Давление в полостях включают пневматические усилители таким образом, что линия « 1» от исполнительного механизма сообщается с линией питания «⊲», а линия «2» - с атмосферой. В результате перепада давлений в линиях «1» и «2» выходной элемент 12 исполнительного механизма совершает ход и посредством кулачка 13 и коромысла 10 изменяет усилие пружины обратной связи 8 до тех пор, пока вновь не будет достигнуто равновесие на рычаге 2. Таким образом, новому значению входного сигнала соответствует новое положение выходного элемента исполнительного механизма 11. Настройка начала хода осуществляется вращением винта 6, диапазона – перемещением ползуна 9 по пазу коромысла 10. Дроссель 14 служит для изменения коэффициента усиления позиционера, дроссель 15 - для изменения величины расхода воздуха на выходе позиционера (подача воздуха на исполнительный механизм), а также для устранения автоколебаний выходного звена исполнительного механизма. Дроссель 14 служит для изменения коэффициента усиления позиционера, дроссель 15 – для изменения величины расхода воздуха на выходе позиционера (подача воздуха на исполнительный механизм), а также для устранения автоколебаний выходного звена исполнительного механизма. 4.2 Конструкция. 4.2.1 Конструкция позиционера приведена на рис.2. Основными узлами позиционера является блок преобразования 6, пневматический усилитель 4 (в позиционере двустороннего типа их два). Узлы позиционера смонтированы в корпусе 8, внутри которого расположены коммутационные каналы. На корпусе расположены штуцера 2, резьбы которых предохраняются заглушками 1 и манометры-индикаторы 3 (в позиционерах одностороннего действия их два, двустороннего - три), предназначенные для индикации сигналов в линиях связи. По специальному заказу позиционер поставляется без штуцеров 2 и без манометра-индикатора установленного в линии питания. При этом на корпусе расположены отверстия под штуцера с конической резьбой . дюйма. Обратная связь позиционера с поворотным исполнительным механизмом осуществляется посредством выходного валика 10. Обратная связь позиционера с возвратно-поступательным исполнительным механизмом осуществляется посредством рычага 12 и пальца 11. Палец может перемещаться вдоль паза рычага и устанавливаться на любую оцифрованную отметку, соответствующую выбранному условному ходу исполнительного механизма. Связь выходного валика 10 с пружиной обратной связи 5 осуществляется через профильный кулачок 13 и коромысло 7. Для свободного отвода воздуха из внутренней полости позиционера служит фильтр 9. В нижней части стенки корпуса имеется патрубок 14 для подвода электрического кабеля. 4.2.2 Конструкция блока преобразования приведена на рис.3. Блок преобразования, собранный на плате 8, представляет собой преобразователь входного электрического сигнала в выходной пневматический сигнал и включает в себя узел коромысла 9, узел рычага 3 и узел магнитопровода 1. Узел магнитопровода представляет собой магнитопровод цилиндрической формы с находящимся внутри него постоянным магнитом 15. На постоянном магните запрессован полюсный наконечник, служащий для перераспределения его потока. В кольцевом зазоре магнитопровода расположена катушка 16, жестко закрепленная на рычаге 3. К рычагу прикреплен груз 6, служащий противовесом и две заслонки 7, расположенные с обеих сторон рычага между запрессованными в колодку соплами 13 и представляющие собой элементы типа «сопло-заслонка». В позиционере двустороннего действия в работе принимают участие оба элемента «сопло-заслонка», тогда как в позиционере одностороннего действия участвует в работе один из элементов «сопло-заслонка». Узел коромысла 9 осуществляет связь с кулачком и пружиной обратной связи12, взаимодействующей с рычагом. Для грубой настройки начального положения выходного звена исполнительного механизма служат гайки 11, для точной - винт 5. Грубая настройка диапазона осуществляется перемещением ползуна 10 по пазу коромысла, точная – вращением винтов 14. Для настройки диапазона исполнительного механизма прямого действия ползун должен находиться в верхней части коромысла, обратного действия - в нижней. Жидкостный демпфер 2 служит для гашения колебаний рычажной системы. 4.2.3 Конструкция пневматического усилителя представлена на рис.4. Пневматический усилитель представляет собой сборку трех корпусов 3, 5, 6 и крышки 1, между которыми расположены мембрана управления, мембрана компенсации, состоящая из мембраны 4 и запрессованных втулок 8, 10, а также клапана 9, прижимаемого к седлам пружинами 2 и 11. Полость между корпусом 6 и мембраной 7 образует камеру управления А, полость между корпусом 3 и мембраной 4 образует камеру выхода В. Питание подается в камеру Г. Камера Б соединена с атмосферой. В конструкции пневматического усилителя предусмотрен регулируемый игольчатый дроссель 13 - для изменения коэффициента усиления позиционера, соединяющий камеры А и Г и регулируемый дроссель выхода 12 - для изменения величины расхода воздуха.
Так же есть на российском рынке ЭПП 300 завода РУСТ-95
Режимы работы ЭПП. Читать 26 вопрос, режим работы “ПП в общем случае режим работы –следящей САУ. Следящая система управления — это система автоматического управления, в которой управляемая величина воспроизводит произвольно изменяющееся задающее воздействие. Пример следящей системы — радиолокационная станция, в её задачи входит сопровождение цели с заранее неизвестным законом движения. О динамических свойствах следящей системы можно судить по величине ошибки. Также сигнал ошибки в следящих системах является сигналом, в зависимости от величины и «характера» которого осуществляется управление объектом. Различают системы статические и астатические. Статические системы управляются значением ошибки: есть ошибка - есть управление в системе, больше величина ошибки - сильнее реакция системы. Так, если целью сопровождения радиолокационной станции является неподвижно висящий вертолёт, то станция, отработав ошибку, "замирает". Если цель-вертолёт начнёт движение, то появится ошибка и система "оживёт". Если траектория движения цели будет круговой с постоянной скоростью, на постоянной высоте с центром в точке, где находится радиолокационная станция, то ошибка (её "характер") будет постоянной. Системы способные автоматически выполнять свои функции при наличии ошибки постоянной величины называют астатическими. Следящая система может быть реализована с любым фундаментальным принципом управления и отличается от аналогичной системы программного управления тем, что вместо датчика программы в ней будет размещено устройство слежения за изменениями внешних воздействий. В следящих системах управляющее воздействие также является величиной переменной, но математическое описание его во времени не может быть установлено, так как источником сигнала служит внешнее явление, закон изменения которого заранее неизвестен. Так как следящие системы предназначены для воспроизведения на выходе управляющего воздействия с возможно большей точностью, то ошибка, так же как и в случае систем программного регулирования, является той характеристикой, по которой можно судить о динамических свойствах следящей системы. Ошибка в следящих системах, как и в системах программного регулирования, является сигналом, в зависимости от величины которого осуществляется управление исполнительным двигателем. Следящие системы. Входное воздействие неизвестно. Оно определяется только в процессе функционирования системы. Ошибки очень сильно зависят от вида функции f(t).

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|
 НАЗНАЧЕНИЕ КЛАПАНОВ И ИХ ОСОБЕННОСТИ
НАЗНАЧЕНИЕ КЛАПАНОВ И ИХ ОСОБЕННОСТИ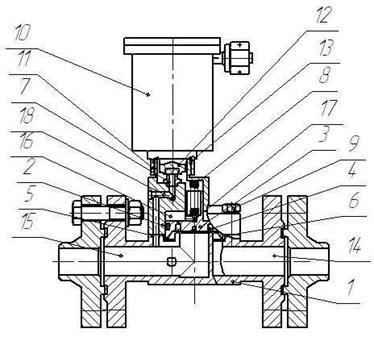 Клапаны предназначены для использования в составе промышленного оборудования в качестве запорных и отсечных устройств с дистанционным электрическим управлением на трубопроводах жидких и газообразных сред. Главная отличительная особенность данного типа клапанов заключается в использовании ими для своего функционирования давления рабочей среды, что позволяет использовать их в большем диапазоне условных проходов по сравнению с клапанами прямого действия. Также, в отличие от клапанов с принудительным подъемом поршня, клапаны пилотного типа используются в большем диапазоне давлений. Однако, для работы клапана пилотного типа необходимо наличие перепада давления между входной полостью и управляющей полостью (см. устройство клапана ниже).
Клапаны предназначены для использования в составе промышленного оборудования в качестве запорных и отсечных устройств с дистанционным электрическим управлением на трубопроводах жидких и газообразных сред. Главная отличительная особенность данного типа клапанов заключается в использовании ими для своего функционирования давления рабочей среды, что позволяет использовать их в большем диапазоне условных проходов по сравнению с клапанами прямого действия. Также, в отличие от клапанов с принудительным подъемом поршня, клапаны пилотного типа используются в большем диапазоне давлений. Однако, для работы клапана пилотного типа необходимо наличие перепада давления между входной полостью и управляющей полостью (см. устройство клапана ниже). При включении электромагнитного привода (10) сердечник (12) втягивается и открывает выход рабочей среды из полости управления (16) через каналы поршня (17), седло (7), каналы крышки (18) в выходную полость (15) клапана. Давление среды в управляющей полости (16) падает и под действием возникающего перепада давления между входной полостью (14) и управляющей полостью (16) поршень (3) перемещается вверх до упора, сжимая пружину (8) и открывая проходное сечение клапана, и удерживается в этом положении. Перетекание рабочей среды из входной полости (14) в полость управления (16) через зазор между неуплотненным поршнем (3) и крышкой (2) не приводит к повышению давления в последней, т.к. оно сбрасывается через каналы (17) и (18) в выходную полость (15) клапана. Закрытие клапана происходит после отключения электромагнитного привода (10), когда его сердечник (12) опускается на седло (7) под действием возвратной пружины электромагнитного привода (10) и разъединяет полость управления (16) и выходную полость (15). Благодаря перетеканию рабочей среды из входной полости (14) в полость управления (16) давление в ней начинает повышаться и поршень (3) под действием пружины (8) и собственного веса перемещается вниз, перекрывает проходное сечение клапана, после чего давление во входной полости (14) и полости управления (16) выравнивается, а поршень (3) прижимается к седлу корпуса (1) ,за счет перепада давления между входной (14) и выходной (15) полостями.
При включении электромагнитного привода (10) сердечник (12) втягивается и открывает выход рабочей среды из полости управления (16) через каналы поршня (17), седло (7), каналы крышки (18) в выходную полость (15) клапана. Давление среды в управляющей полости (16) падает и под действием возникающего перепада давления между входной полостью (14) и управляющей полостью (16) поршень (3) перемещается вверх до упора, сжимая пружину (8) и открывая проходное сечение клапана, и удерживается в этом положении. Перетекание рабочей среды из входной полости (14) в полость управления (16) через зазор между неуплотненным поршнем (3) и крышкой (2) не приводит к повышению давления в последней, т.к. оно сбрасывается через каналы (17) и (18) в выходную полость (15) клапана. Закрытие клапана происходит после отключения электромагнитного привода (10), когда его сердечник (12) опускается на седло (7) под действием возвратной пружины электромагнитного привода (10) и разъединяет полость управления (16) и выходную полость (15). Благодаря перетеканию рабочей среды из входной полости (14) в полость управления (16) давление в ней начинает повышаться и поршень (3) под действием пружины (8) и собственного веса перемещается вниз, перекрывает проходное сечение клапана, после чего давление во входной полости (14) и полости управления (16) выравнивается, а поршень (3) прижимается к седлу корпуса (1) ,за счет перепада давления между входной (14) и выходной (15) полостями.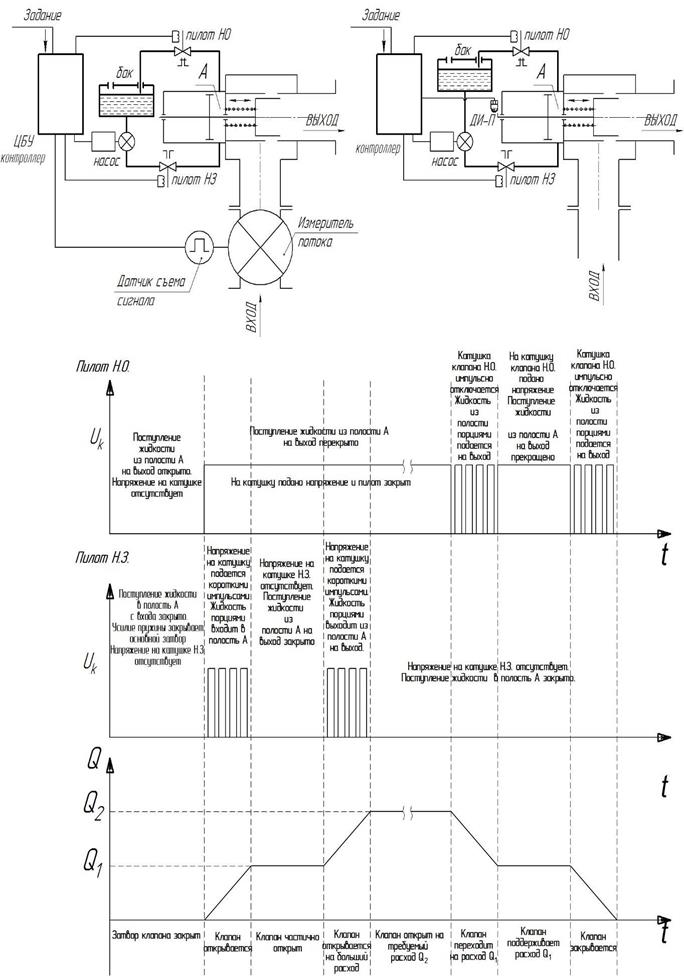
 Клапан работает в трех режимах:
Клапан работает в трех режимах: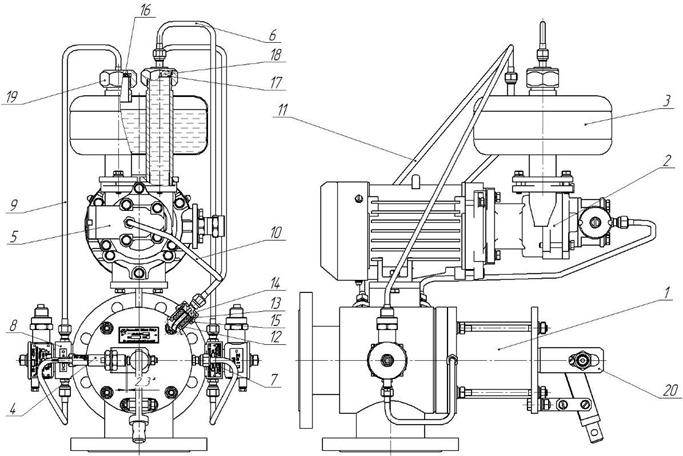


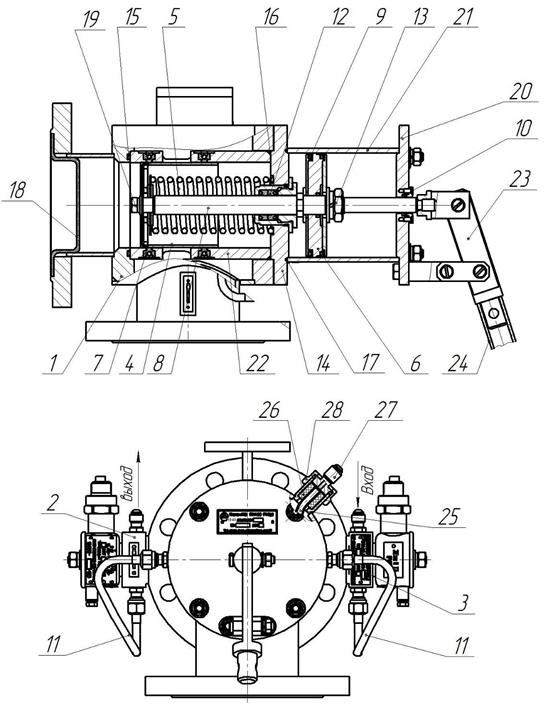
 1-корпус; 2-пилотный клапан управления нормально открытый (пилот НО); 3- пилотный клапан управления нормально закрытый (пилот НЗ); 4- поршень; 5- пружина: 6 - поршень; 7- манжета; 8- шток; 9- манжета; 10-манжета; 11-труб
1-корпус; 2-пилотный клапан управления нормально открытый (пилот НО); 3- пилотный клапан управления нормально закрытый (пилот НЗ); 4- поршень; 5- пружина: 6 - поршень; 7- манжета; 8- шток; 9- манжета; 10-манжета; 11-труб