|
|
Кинематическое и силовое исследование механизма.Структурный анализ механизма
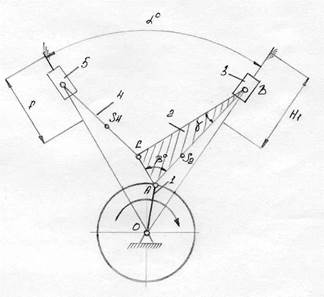
Н1=300 мм. ОА=r=38 мм. АB=ℓ1=150 мм. β°=50° CF=ℓ2=120 мм. AF2=48 мм. CF4=48 мм. α°=50° Рис.1- схема ДВС D=160 мм. АВ= λ·ОА= 600мм
z2=30 ξ1=0,908 ξ2=0,428 mI=3 мм. mII=6 мм. m1=14 кг m2=12 кг m3=19 кг m4=3,5 кг m5=9 кг Js2= 0,1 кг*м2 n1=4000 об/мин Js4= 0,1 кг*м2 n2=1270 об/мин
γ=75º h=50 мм Рис.2 – схема планетарного редуктора φy=60º Cтруктурный анализ механизма Кривошипно-шатунный механизм V-образного ДВС состоит из 5 подвижных звеньев: О-стойка; 1- кривошип ОА; 2 и 4 – шатуны; 3 и 5 ползуны (поршни), и 7 кинематических пар: I – стойка-кривошип ОА; II – кривошип ОА шатун АВС; III – штун АВ – ползун В; IV – шатун В – стойка; V - шатун АВС – шатун CF; VI - шатун CF – поршень F; VII - поршень F – стойка. Все кинематические пары – низшие. Подвижных звеньев n=5; число низших кинематических пар Р5=7, Р4=0. степень подвижности определяем по формуле Чебышева: WIII=3n-2p5-p4=3·5-2·7=1 Согласно классификации Артоболевского данный механизм состоит из механизма 1 класса (стойка-кривошип) и структурных групп 2-го класса второго порядка (группа 5, 4 и группа 2, 3). Поэтому механизм является механизмом 2 класса, второго порядка. По классификации Асура данный механизм является механизмом1 класса, второго порядка.
1 кл. 1 пор. по Ассуру 1 кл. 1 пор. по Артоболевскому
Рис.3 – группы Ассура
Кинематическое и силовое исследование механизма.
1. Под углами 2. Из центра О – вращения кривошипа ОА1 радиусами, равными длине (ℓ+r) и (ℓ-r) отмечаем Рис.4 3. Траектория пальца А кривошипа от точки А0 делим на 12 равных частей и из полученных точек А1, А2, … А11 отмечаем положения В1, В2, … В11 на линии О1. Соединяем полученные точки А1, А2, … А11 с центром О и соответствующими точками В1, В2, … В11. 4. Определяем положение точек С кривошипа АВС для чего откладываем угол β и расстояние АС. 5. Из центров С радиусом CF делаем засечки (положение поршня F) на траектории движения. 6. Соединяем точки С и F, находим положение кривошипа CF и поршня F. Таким образом получаем 12 планов положений механизма, соответствующие разным положениям кривошипа ОА. 2.2 Определение линейных скоростей точек механизма. 1. Угловая скорость вращения кривошипа.
2. Скорость точки А кривошипа. υА=τ·ω1=lОА·ω1=0,15·418,6= 62,7м/с υА
3. Масштаб плана скоростей.
4. Скорость точки В шатуна АВС 1) Скорость точки В находится графическим решением уравнений (построением плана скоростей) 5. Скорость точки С шатуна АВС определим из подобия треугольников ∆АВС~ ∆авс 6. Скорость точки F шатуна CF находим совместным графическим решением уравнений 3) 3) Полученные значения скоростей сводим в таблицу.
2.3 Угловые скорости звеньев механизма
Условные скорости звеньев определяем аналитически с использованием данных планов скоростей. Величины и направление условных скоростей звеньев сведены в таблицу. 2.4 Определение ускорений точек механизма двигателя. 1. Ускорение точки А
2. Масштаб плана ускорений
3. Ускорение точки В (4 положение) 1)
Значение
4. Ускорение точки С шатуна АВС 2) Где ∆АВС ~ ∆а’в’с’
Величину ускорения точки С находим графически решением уравнения 2) Положение точки С на плече ускорений можно также найти, построив ∆авс~∆ABC (т. С находится на пересечении лучей проведенных из точек а и в отрезка ав под углами β и γ)
5. Ускорение точки F шатуна CF 3)
Значение
Полученные значения уравнений сведём в таблицу 2.
Таблица 2 – линейные ускорения.
2.5 Определение угловых ускорений звеньев механизма. Угловые ускорения звеньев определяем аналитически с использованием плана ускорений. ε1=0, т.к. ω1=const
Величины и направления угловых ускорений звеньев сведены в таблицу.
3. Кинематическое исследование механизма ДВС 3.1 Определение избыточного давления Р газов на поршень. Избыточное давление Pi=hi∙μp∙A, где hi – ординаты индикаторной диаграммы, измеренные от линии атмосферного давления по кривой измерения давления в цилиндре. μp – масштаб индикаторной диаграммы. А – площадь поперечного сечения цилиндра. Находим величину ординат индикаторной диаграммы hi , соответствующие i-тому положению кривошипа ОА. Величина избыточного давления.
3.2 Определение сил инерции звеньев. Результирующая сила инерции звеньев
Положение №4 Ри1=0 Ри2=m2∙μW(πs2’)=12∙8100=97 580 H Ри3=m3∙ μW(πв’)=18∙5346=96 238 H Ри4=m4∙ μW(πs4’)=5∙1260=64 846 H Ри3= m5∙ μW(πf’)=18∙1290=233 280H Положение №10 Ри1=0 Ри2=m2∙ μW(πs2’)=12∙7938=95 256 Н Ри3=m3∙ μW(πв’)=18∙3078=55 404 Н Ри3=m4∙ μW(πs4’)=5∙8748=43 740 Н Ри3=m5∙ μW(πf’)=18∙12798=230 364 Н Результирующие сил инерции
3.3 Определение сил тяжести звеньев. G1=0 G2=m2∙g= 117,6 H G3=m3∙g=176,4 H G4=m4∙g=49 H G5=m5∙g=176,4 H 3.4 Определение давления в кинематических парах. 3.4.1 Pассмотрение равновесия двухповодковой группы звеньев 4 и 5 (положение 4). Действующие на группу силы: Р5=161553 Н – давление газов на поршень F/ Gi – силы тяжести. Pи – силы инерции.
Условие равновесия группы 4, 5.
R05 находится из уравнения моментов всех сил действующих на группу относительно точки С. Положение №4 . ΣМF=0
3.4.2 Равновесие двухповодковой группы 2,3 (положение №4)
3.4.3 Равновесие кривошипа (положение №4)
3.4.4 Проверка (положение №4)
3.4.5 Равновесие двухповодковой группы 2,3 (положение №10)
3.4.6 Равновесие кривошипа (положение №10)
Проверка проводится аналогично положению №4. 
Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|
 Исходные данные:
Исходные данные: z1=15
z1=15 λ=4
λ=4
 2.1 Планы положений механизма.
2.1 Планы положений механизма. к вертикали проводим направляющие 1 и 2, проходящие через центр вращения кривошипа.
к вертикали проводим направляющие 1 и 2, проходящие через центр вращения кривошипа. – верхнее и
– верхнее и  - нижнее крайнее положение поршня
- нижнее крайнее положение поршня  .
.

 О1А и направлена в сторону ω1
О1А и направлена в сторону ω1 =
=  , пусть
, пусть  =90 мм.
=90 мм.






 направлена по ВА от В к А.
направлена по ВА от В к А. найдём графическим решением уравнения 1)
найдём графическим решением уравнения 1)
 направлена по СА от С к А
направлена по СА от С к А
 направлена по CВ от С к В
направлена по CВ от С к В


 направлена по FC от F к С
направлена по FC от F к С найдем графическим решением уравнения 3)
найдем графическим решением уравнения 3)





 проходит через полюсы инерции τ2 и τ4 шатунов, положение которых определяется отрезками.
проходит через полюсы инерции τ2 и τ4 шатунов, положение которых определяется отрезками.
 - давление направляющих на ползун F и давление шатуна 2 на шатун 4.
- давление направляющих на ползун F и давление шатуна 2 на шатун 4.