
|
|
Связь потерь в обмотке ротора со скольжением
Пусть Если Если
3.2.9. Механическая характеристика АД (n = f(М))
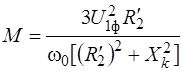
Из схемы замещения (см. рис. 3.16) имеем
Из условия
Так как
Анализ механической характеристики (рис. 3.18). Анализ выражения для определения момента показывает, что момент пропорционален квадрату приложенного напряжения, поэтому асинхронный двигатель очень критичен к изменению
Рис. 3.18. Механическая характеристика АД
напряжения питания. Критический момент Мкр не зависит от сопротивления обмотки ротора Изменения напряжения питания U и активного сопротивления R2 влияют на механические характеристики АД (рис. 3.19).
Рис. 3.19. Влияние U (а) и R2 (б) на механическую характеристику АД
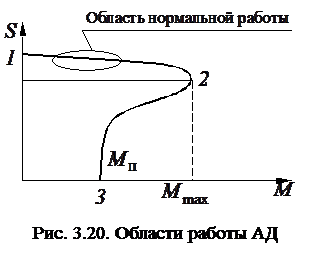
Область работы АД. Включает в себя область устойчивой работы двигателя 1–2 и неустойчивой работы 2–3 (рис. 3.20). В области устойчивой работы проявляется свойство саморегуляции скорости. Для оценки перегрузочной способности двигателя вводится коэффициент перегрузки
При попадании в область неустойчивой работы двигатель останавливается. Способы пуска АД
Проблемы пуска: большой пусковой ток, малый пусковой момент. Ток ротора I2 определяется из соотношения
При пуске
Применяются следующие способы пуска: прямой пуск, пуск при пониженном напряжении, пуск при введении в цепь ротора добавочных активных сопротивлений. Прямой пуск. Применяется при пуске двигателей в мощных сетях. Никаких мер по повышению пускового момента и понижению пускового тока не предусмотрено. Пуск при пониженном напряжении. С целью понижения пускового тока на время пуска понижают напряжение питания в слабых сетях. Рассмотрим два варианта пуска двигателя при пониженном напряжении:
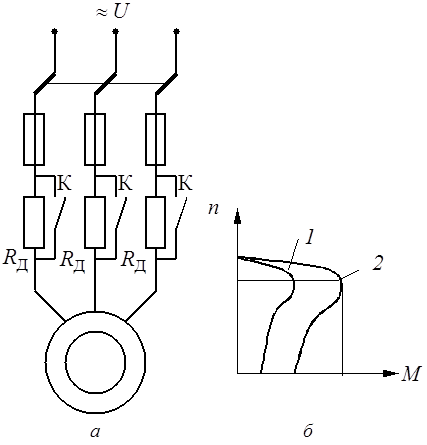
Вариант I – пуск при введении в цепь статора добавочных сопротивлений (рис. 3.21). На время пуска К разомкнуты, после пуска – замкнуты. При разомкнутых К  . .
Рис. 3.21. Схема пуска двигателя (а) и механические характеристики АД (б). Вариант I (1 – К разомкнуты; 2 – RД = 0, К замкнуты)
Вариант II – пуск двигателя при переключении обмоток статора на время пуска с соединения треугольником на соединение звездой (рис. 3.22).
Рис. 3.22. Схема пуска двигателя (а) и механические характеристики АД (б). Вариант II
В момент пуска переключатель находится в правом положении и обмотки статора соединяются в звезду. После пуска переключатель устанавливают в левое положение и обмотки статора соединяются в треугольник. Из анализа трехфазной цепи получаем, что при соединении обмоток статора в звезду потребляемый из сети ток будет в 3 раза меньше, чем при соединении в треугольник. Недостатком обоих методов является уменьшение пускового момента за счет понижения напряжения на статоре. Пуск при введении в цепь ротора добавочных активных сопротивлений. На время пуска в цепь ротора вводятся добавочные сопротивления, которые по мере разгона выводятся (рис. 3.23).
Рис. 3.23. Схема пуска двигателя при введении в цепь ротора добавочных активных сопротивлений (а) и механические характеристики АД (б): 1 – К1 и К2 замкнуты, RД = 0; 2 – К1 разомкнуты, К2 – замкнуты, RД = RД2; 3 – К1 и К2 разомкнуты, RД = RД1 + RД2
Метод позволяет решить обе проблемы пуска, т.е. уменьшить пусковой ток за счет повышения сопротивления цепи и повысить пусковой момент. Такой способ пуска возможен только для двигателя с фазным ротором.
Двигатели с улучшенными пусковыми Характеристиками
Введение в цепь ротора добавочных сопротивлений позволяет при пуске двигателей с короткозамкнутым ротором получить те же эффекты, что и при пуске двигателей с фазным ротором. Двигатель с двойной «беличьей клеткой» (рис. 3.24).В роторе имеются две обмотки типа «беличья клетка». У обмотки 2 меньшее активное сопротивление по сравнению с обмоткой 3.

При пуске двигателя частота тока ротора и его индуктивное сопротивление максимальны. В этот момент распределение токов по обмоткам определяется индуктивными сопротивлениями. Так как Двигатель с глубоким пазом (рис. 3.25). Во время пуска двигателя происходит вытеснение тока в верхнюю часть сечения стержня. Поскольку ток течет не по всему сечению, а по его части,

то сопротивление обмотки возрастает. После пуска частота тока в роторе значительно уменьшается, следовательно, вытеснение тока не происходит и ток течет по всему сечению обмотки, т.е. уменьшается R. Эффект тот же, что и у двигателя с двойной «беличьей клеткой».

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|
 ;
;  ;
; ;
;  ;
;
 .
. , тогда
, тогда  . Вся мощность расходуется на нагрев обмоток.
. Вся мощность расходуется на нагрев обмоток. .
. , это значит, что 5 % электромагнитной мощности расходуется на нагрев обмоток, а 95 % – на создание механической энергии.
, это значит, что 5 % электромагнитной мощности расходуется на нагрев обмоток, а 95 % – на создание механической энергии. ;
; .
. получаем координату экстремальной (критической) точки
получаем координату экстремальной (критической) точки ;
;  .
. мало, то им можно пренебречь.
мало, то им можно пренебречь.

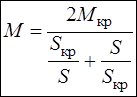 – формула Клосса.
– формула Клосса.
 , а критическое скольжение Sкр – от величины приложенного напряжения U1ф. Асинхронный двигатель имеет малый пусковой момент, что создает проблемы при запуске двигателя под нагрузкой.
, а критическое скольжение Sкр – от величины приложенного напряжения U1ф. Асинхронный двигатель имеет малый пусковой момент, что создает проблемы при запуске двигателя под нагрузкой.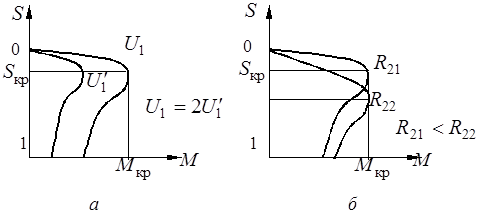
 .
. .
. ,
,  , где I2п и I2н – соответственно пусковой и номинальный токи ротора.
, где I2п и I2н – соответственно пусковой и номинальный токи ротора. ;
;  .
. .
.


 , то ток вытесняется в обмотку 3, обладающую повышенным
, то ток вытесняется в обмотку 3, обладающую повышенным  , и индуктивное сопротивление уже не влияет на распределение токов в обмотках. Так как
, и индуктивное сопротивление уже не влияет на распределение токов в обмотках. Так как  , то больший ток будет протекать по обмотке 2. Таким образом, при пуске работает обмотка 3, обладающая повышенным R, а после разгона – обмотка 2, обладающая пониженным R. Это равносильно тому, что на время пуска в цепь ротора включают добавочное сопротивление.
, то больший ток будет протекать по обмотке 2. Таким образом, при пуске работает обмотка 3, обладающая повышенным R, а после разгона – обмотка 2, обладающая пониженным R. Это равносильно тому, что на время пуска в цепь ротора включают добавочное сопротивление.