
|
|
Способы регулирования частоты вращения судовых АДСкорость вращения ротора АД равна
Таким образом, чтобы изменить скорость АД необходимо изменить либо скольжение s, либо скорость вращения поля статора n1 Скольжение s можно изменить путем введения в цепь ротора добавочных сопротивлений или изменением подводимого напряжения. Скорость вращения поля статора определяется частотой сети Регулирование изменением подводимого напряжения.Возможность регулирования АД изменением подводимого напряжения подтверждается графиком (рисунок 1). Точка "А" соответствует номинальному режиму. При уменьшении напряжения вращающий момент уменьшается пропорционально U12. Характеристика 3 соответствует уменьшению напряжения примерно на 30%. Скольжение при этом увеличивается, а скорость вращения уменьшается примерно на 20% от номинальной, т.е. диапазон регулирования оказывается небольшим. Практически диапазон регулирования ограничивается величиной критического скольжения, одновременно резко снижается перегрузочная способность. Изменение подводимого к двигателю напряжения может осуществляться различными способами: применением источника с регулируемым напряжением, включением в цепь статора дросселя насыщения, регулируемого автотрансформатора или тиристорных коммутаторов. Для АД с повышенным активным сопротивлением обмотки ротора пределы регулирования данным способом значительно расширяются, что показано на рисунке 1,б. Подобные свойства имеет двигатель с массивным или двухслойным ротором, разработанный в нашей стране под руководством профессора Могильникова B.C.
 Эти двигатели, кроме того, имеют отличные пусковые характеристики (большой пусковой момент и малый пусковой ток), лучшие виброшумовые характеристики, что особенно актуально для судовых ЭЭС Регулирование изменением частоты питающей сети.Этот способ регулирования скорости возможен только при питании АД от специальных установок, как правило, статических преобразователей частоты. Механические характеристики двигателя при различной частоте и неизменном подводимом напряжении представлены на рисунке 2.
Если при уменьшении частоты напряжение постоянно
при Мс=const, В этих условиях АД работает с постоянными значениями К недостаткам частотного регулирования следует отнести большие габариты и высокую стоимость питающей установки, отрицательное влияние преобразователей частоты на судовую сеть, что выражается в искажении формы кривой напряжения сети, высокий уровень собственных шумов. К достоинствам относится плавное, в широких пределах регулирование скорости АД. В настоящее время в связи с совершенствованием статических преобразователей частоты на тиристорах этот способ регулирования скорости АД становится весьма перспективным. Регулирование изменением числа пар полюсов.АД, в которых предусмотрена возможность изменять число пар полюсов р1 называются полюсопереключаемыми или многоскоростными. Обычно они выпускаются на 2, 3 или на 4 скорости вращения, причем двухскоростные АД изготовляются с одной обмоткой на статоре и с переключением полюсов в отношении 2:1, трехскоростные - с двумя обмотками на статоре, одна из которых выполняется с переключением, четырехскоростные - с двумя обмотками на статоре, каждая из которых выполняется с переключением числа пар полюсов в отношении 2:1. Например, двигатель на частоту
Рисунок 4 - Механические характеристики АД 
Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|
 (1)
(1) и числом пар полюсов p; изменение этих параметров приводит к изменению синхронной скорости поля n1, а следовательно, и скорости n2.
и числом пар полюсов p; изменение этих параметров приводит к изменению синхронной скорости поля n1, а следовательно, и скорости n2.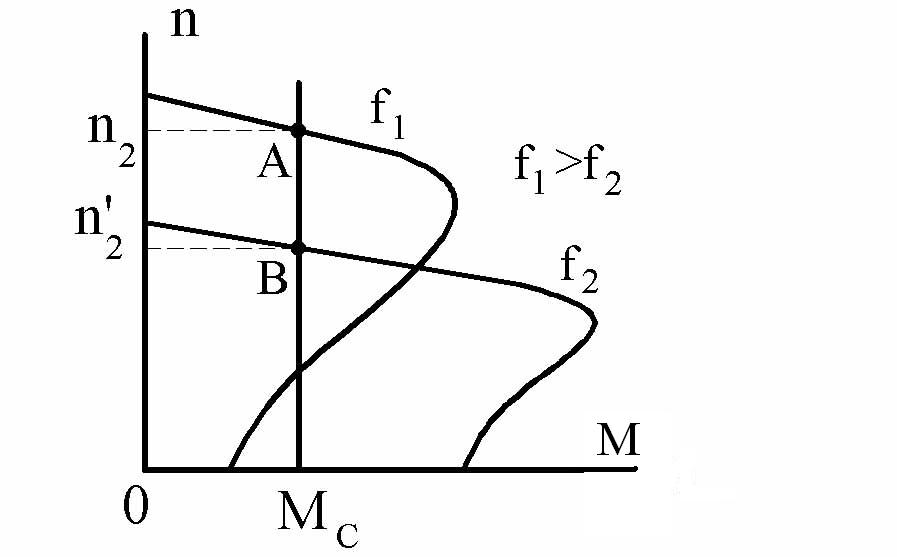 При уменьшении частоты максимальный момент Мmax возрастает, а скорость вращения поля статора n1 и скорость ротора n2 уменьшаются.
При уменьшении частоты максимальный момент Мmax возрастает, а скорость вращения поля статора n1 и скорость ротора n2 уменьшаются. , то увеличивается магнитный поток в соответствии с соотношением
, то увеличивается магнитный поток в соответствии с соотношением (2)
(2) , при Мс ≡ n2,
, при Мс ≡ n2,  . (3)
. (3) и перегрузочной способности Мmax/Мн.
и перегрузочной способности Мmax/Мн. с синхронными скоростями вращения 1500/1000/750/500 имеет одну обмотку с переключением на 2р = 4 и 8 и другую обмотку с переключением на 2р = 6 и 12 полюсов.
с синхронными скоростями вращения 1500/1000/750/500 имеет одну обмотку с переключением на 2р = 4 и 8 и другую обмотку с переключением на 2р = 6 и 12 полюсов.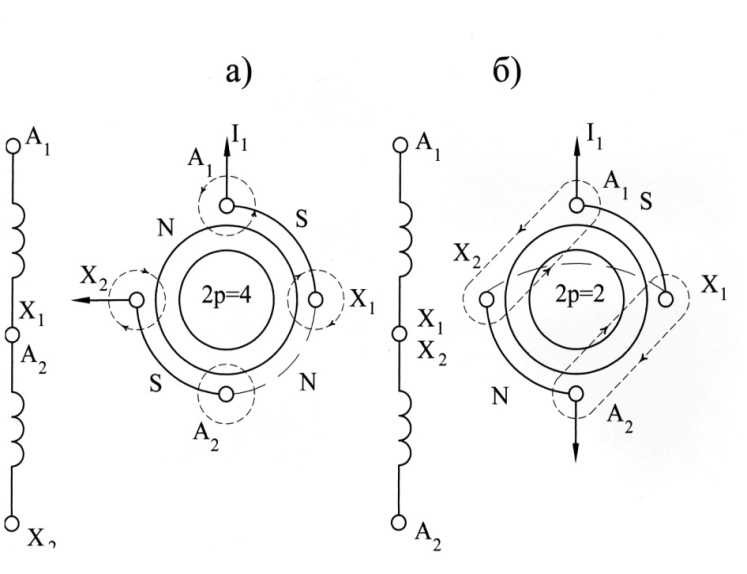 Каждая фаза обмотки статора многоскоростного АД состоит из двух одинаковых частей (полуобмоток), которые включаются различным образом. Большая скорость получается при меньшем числе полюсов.
Каждая фаза обмотки статора многоскоростного АД состоит из двух одинаковых частей (полуобмоток), которые включаются различным образом. Большая скорость получается при меньшем числе полюсов. Механические характеристики АД при различных числах полюсов приведены на рисунке 4. Поскольку при рассмотренном переключении обмотки статора напряжение фазы не изменяется, то вращающий момент при уменьшении числа пар полюсов уменьшается, так как
Механические характеристики АД при различных числах полюсов приведены на рисунке 4. Поскольку при рассмотренном переключении обмотки статора напряжение фазы не изменяется, то вращающий момент при уменьшении числа пар полюсов уменьшается, так как 